.1
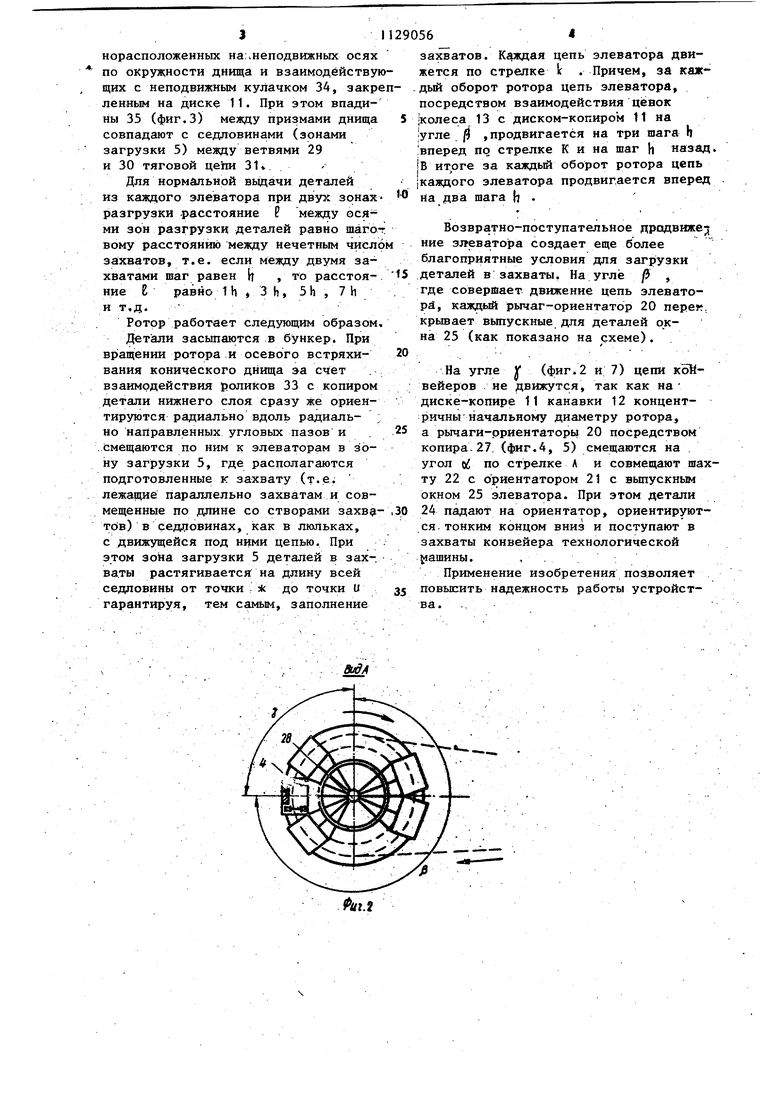
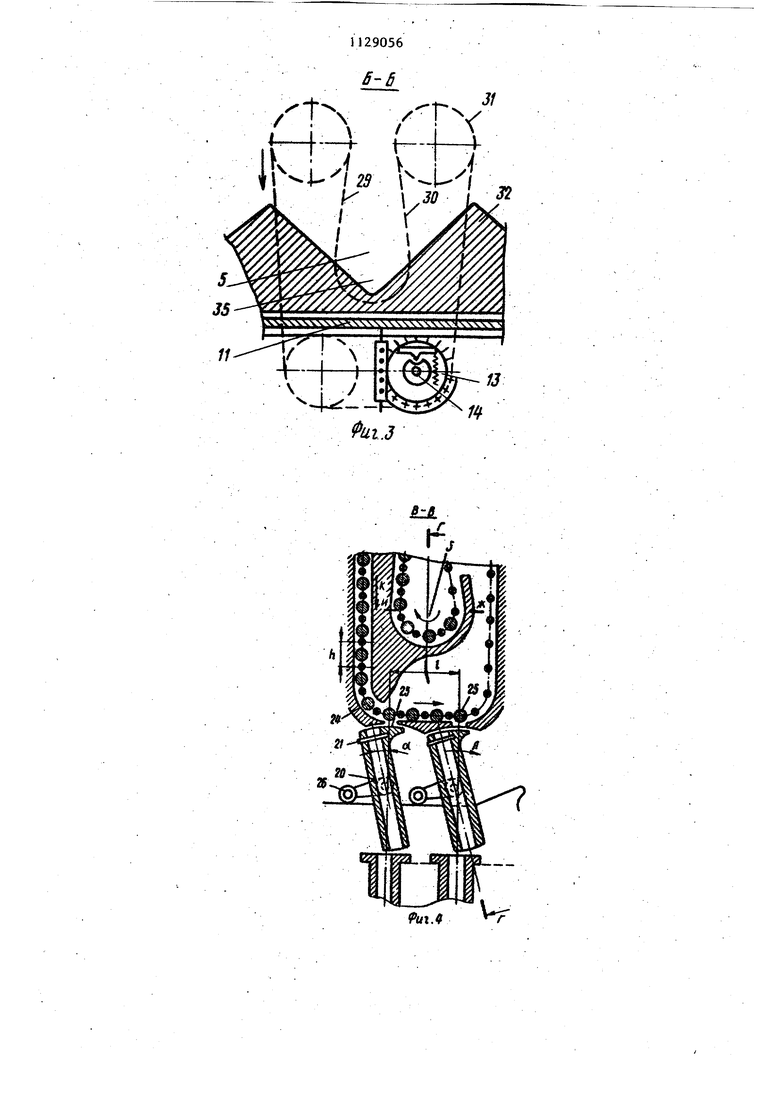
в Изобретение относится к ориентирующим устройствам и может быть при нено для ориентации и подачи штучны деталей типа тел вращения, в частности пегко повреждаемых, например лакированных. Известен роторный автомат питания, содержащий установленные с воз можностью вращения на валу бункер и диск с конусным днищем, рабочие органы, расположенные, равномерно по периферии диска и вьтолненные в виде элеваторов с замкнутой тяговой цепью с захватами, ворошители, закрепленные на конусном днище, механизмы вторичной ориентации и приводы fij . В известном роторном ав-томате . створы захватов расположены хордально по отношению к внутренней коль цевой поверхности бункера. Детали, расположенные по периферии бункера, также располагаются хордально у его стенок, но подавляющая их масса смещена относительно створов захватов, поэтому для западания в захваты необходимо детали совместить с их створками, а следовательно данные автоматы работают с более низким коэффициентом заполнения захватов. Цель изобретения - повьшение надежности работы автомата. Поставленная цель достигается тем, что в роторном автомате питания, содержащем установленные с воз можностью вращения на валу бункер и диск с. конусным днищем, рабочие о ганы, расположенные равномерно по периферии диска и выполненные в виде элеваторов с -замкнутой тяговой цепью с захватами, ворошители, закреппенные на конусном днище, механизмы вторичной ориентации и приво ды, каждьй элеватор установлен перпендикулярно валу и выполнен петле разной формы, при этом изгиб тягово цепи расположен на уровне периферий ной поверхности диска. На фиг.1 изображен предлагаемый роторный автомат питания, общий вид на фиг.2 - вид А на фиг.1; на фиг. разрез В-Б на фиг.1; на фиг.4 - ра рез .В-В на фиг.1; на фиг.З - разрез Г-Г на фиг.4; на фиг.6 - разре Д-Д на фиг.1. Роторный автомат питания содержи бункер 1 и диск 2 с конусным днищем, рабочие органы в биде элеваторов 3 с захватами 4, зоны загрузки 5 и выгрузки 6 деталей, щестерню -, взаимосвязанную с технологической машиной (не показана), корпус 8, смонтированный на неподвижной стойке 9. . Диск 2 с бункером 1 посажен на неподвижную стойку 9 с возможностью осевого перемещения и кинематически связан с корпусом 8 ротора посредством пальца 10. Привод элеваторов содержит неподвижный центральный диск-копир 11 с расположенными по окружности канавками 12, ведомое колесо 13 с Цевками, посаженное на приводной валик 14 звездочек 15 элеватора/ (колесо 13 связано с валиком 14 посредством пружинного предохранительного устройства 16) и-ведущее колесо 17, установленное на оси 18 в корпусе 8 ротора, своими цевками 19 взаимодействующее с цевками колеса 13 и канавками 12 диска-копира Г1. Каждый механизм вторичной ориентации включает рычаг-ориентатор 20 с ориентирующим элементом 21 (в виде профильного окна трафарета или в виде и0жа) и шахтой 22 для разворота детали при ориентации Каждый рычаг-ориентатор жестко закреплен на осях 23 с возможностью поворота вокруг этих соей на угол CkS (для перекрытия выпускных для деталей 24 окон 25 элеватора) посредством рьгаага 26, взаимодействующего с неподвижным копиром 27. Для создания наиболее благоприятных условий-Для загрузки-деталей в элеваторы, в каждом элеваторе 3 з.ахваты 4 расположены паралЛельно вертикальной плоскости симметрии элеватора, проходящей через ось 28 ротора, а зоны загрузки 5 в каждом элеваторе выполнены (фиг.З) в седловинах между ветвями 29 и 30 тяговой цепи 31. создания наиболее благоприятных условий для вьщачи деталей из бункера в подготовленном для захвата положении конусное днище бункера 1 снабжено радиально направленными выступами 32 в виДе трехгранных усеченных призм и механизмом для осевого возвратно-поступательного перемещения (встряхивайия) днища с бункером, включающим три ролика 33, равнерасположенных на неподвижных осях по окружности днища и взаимодейству щих с неподвижньм кулачком 34, закр ленным на диске 11. При этом впадины 35 (фиг.З) между призмами днища совпадают с седловинами (зонами загрузки 5) между ветвями 29 и 30 тяговой цепи 31 Для нормальной вьщачи деталей из каждого элеватора при двух зонах разгрузки расстояние Р между осями зон разгрузки деталей равно шаго вому расстоянию между нечетным числ захватов, т.е. если между двумя захватами шаг равен И , то расстояние Е равно , 5h,7h и т.д. . Ротор работает следующим образом Детали засыпаются в бункер. При вращений ротора и осевого встряхивания конического днища за счет . взаимодействия роликов 33 с копиром детали нижнего слоя сразу же ориентируются радиально вдоль радиально направленных угловых пазов и .смещаются по ним к элеваторам в зону загрузки 5, где располагаются подготовленные к захвату (т.е. лежащие параллельно захватам и совмещенные по длине со створами захва ToiB) в сед)1овинах, как в люльках, с движущейся под ними цепью. При этом зона загрузки 5 деталей в захва.ты растягивается на длину всей седловины от точки до точки U гарантируя, тем самым, заполнение 56 захватов. Каждая цепь элеватора движется по стрелке 1с . Причем, за каждый оборот ротора цепь элеватора, посредством взаимодействия цевок |колеса 13 с диском-копиром 11 на |угле ,продвигается на три шага h вперед по стрелке К и на шаг h назад. IB итоге за каждый оборот ротора цепь |Каждого элеватора продвигается вперед на два шага h . Возвратно-поступательное дродвиже;; ние элеватора создает еще более благоприятные условия для деталей в захваты. На угле , где совершает движение цепь элеватоpd, каждый рычаг-ориентатор 20 neper, крывает вьтускные для деталей окна 25 (как показано на схеме). На угле у (фиг.2 и 7) цепи коНвейеров не движутся, так как на диске-копире 11 канавки 12 концентричны начальному диаметру ротора, а рычаги-рриентаторы 20 посредством копира.27. (фиг.4, 5) смещаются на угол с по стрелке А и совмещают шахту 22 с ориентатором 21 с вьтускным окном 25 элеватора. При этом детали 24 падают на ориентатор, ориентируются, тонким концом вниз и поступают в захваты конвейера технологической уашкны. , . Применение изобретения позволяет повысить надежность работы устройства. ..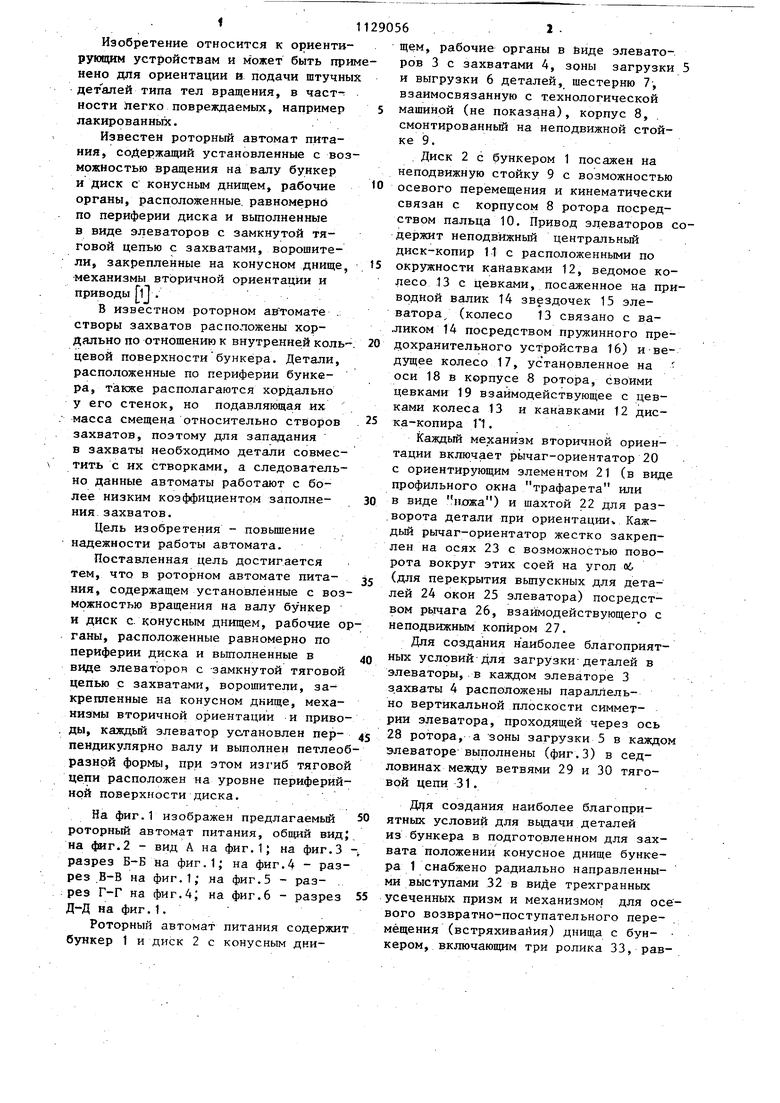
| название | год | авторы | номер документа |
|---|---|---|---|
| Роторный автомат питания | 1982 |
|
SU1077756A2 |
| Загрузочный ротор | 1989 |
|
SU1673382A2 |
| Роторный автомат питания | 1979 |
|
SU891323A1 |
| Роторный автомат питания | 1990 |
|
SU1796408A1 |
| Роторный автомат питания | 1982 |
|
SU1042951A1 |
| Роторный автомат питания | 1976 |
|
SU564139A1 |
| Загрузочный ротор | 1990 |
|
SU1745508A1 |
| Роторный автомат питания | 1985 |
|
SU1283030A1 |
| Роторный автомат питания | 1987 |
|
SU1701476A1 |
| Высадкопосадочная машина для посадки маточников свеклы | 2021 |
|
RU2776132C1 |
РОТОРНЫЙ АВТОМАТ ПИТАНИЯ содержащий установленные с возмож ностью вращения на валу бункер и диск с конусн1ым днищем, рабочие органы, расположенные равномерно по периферии диска и выполненные в виде элеватрров с замкнутой тяговой цепью с захватами, ворошители, закрепленные на конусном днище, механизмы вторичной ориентации и приводы,о тл и ч а ю щ и и с я тем, что, с целью повышения надежности работы автомата, каждый элеватор формы, при этом изгиб тяговой цепи расположен на уровне периферийной поверхности диска. Б - А 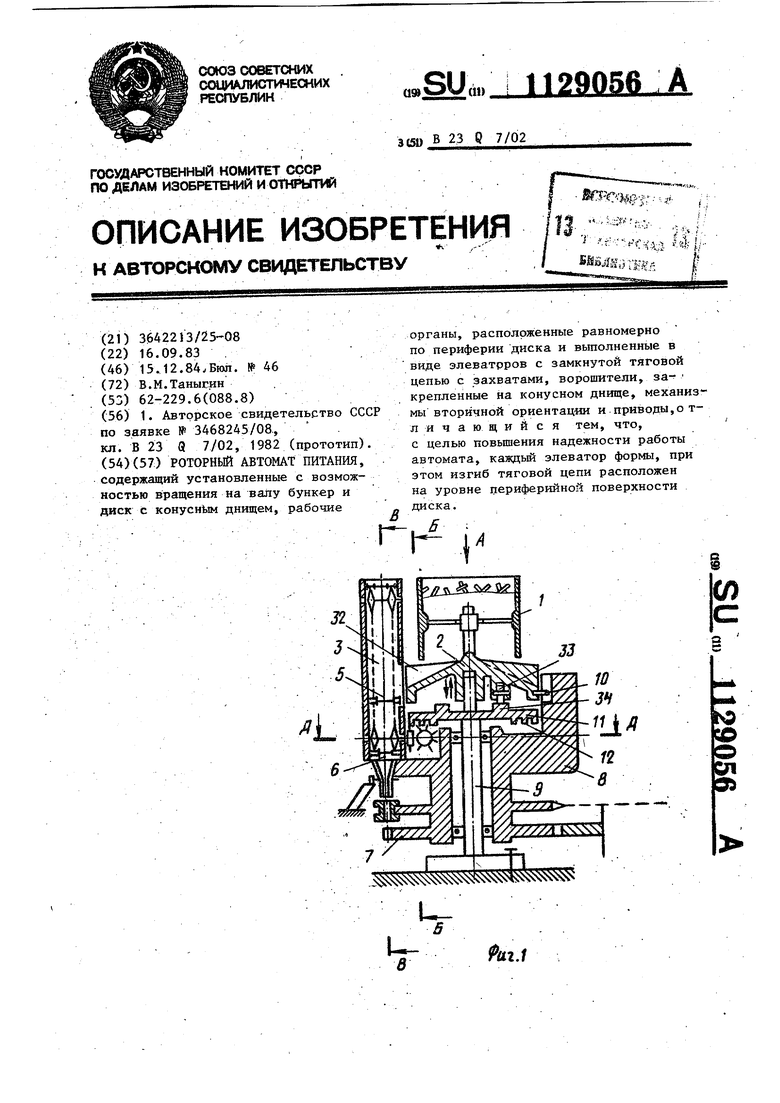
/П X-TV
Ь4IKl f
Ь
/
31
I
X
32
13
П
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Авторское свидетельство С по заявке № 3468245/08, кл | |||
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
