1
Изобрегенпе относится к области машиностроения.
Известны устройства для управления перемещением подвижных узлов, например, исполнительных механизмов робота-манипулятора, содержащие датчики положения подвижных узлов, взаимодействующие с кулачками.
Однако в таких устройствах количество выключателей в схеме управления должно соответствовать количеству адресов.
Большое количество путевых выключателей усложняет конструкцию устройства и схему его управления, в результате чего снижается надежность.
Целью изобретения является упрощение конструкция устройства за счет уменьшения количества путевых выключателей и сокращения числа подводимых проводов к исполнительным механизмам, унрощение схемы управления за счет уменьшения количества элементов в пульте программного управления, что обеспечивает повышение надежности работы с одновременным обесттеченнем точности останова исполнительных механизмов.
Достигается это за счет того, что датчик положения 1каждого исполнительного механизма вынолнен в виде закрепленного на корпусе механизма блока бесконтактных выключателей, смонтированного на этом же корпусе комплекта плоских пружин и установленного на этом же корнусе на общей оси комплекта двуплечпх рычагов. Каждый из рычагов имеет расположенную .в-близи оси .качания базовую плоскость, взаимодействующую со своей плоской иружпной. На одном конце рычага закреплена пластина, входящая в паз соответствующего выключателя, а на втором конце - ролик. На трассе движения каждого исполнительного механизма закреплены перед точка.ми останова этого механ 1зма гребенки, и.меющие выступы-кулачки в различных сочетаниях. Макснмальное число выступов соответствует числу рычагов в блоке датчика положения. Кулачки гребенок взаимодействуют
с роликами упомянутых выше рьгчагов для формирования однозначного кодового сигнала о положении исполнительного механизма и переключения скорости перемещения механизма на более медленную. Один из выступов выполнен более коротким для подачи сигнала на останов этого механизма.
Для исполнительного механизма, имеющего, например, семь мест останова с переключением скорости перемещения на меньшую перед каждым остановом, датчик положения исполнительного механизма содержит блок из четырех бесконтактных выключателей и комплект из четырех двуплечих рычагов. Гребенки, установленные на направляющей этого исполнительного механнзма, имеют до четырех
выступов-кулачков, один из которых выполнен более коротким.
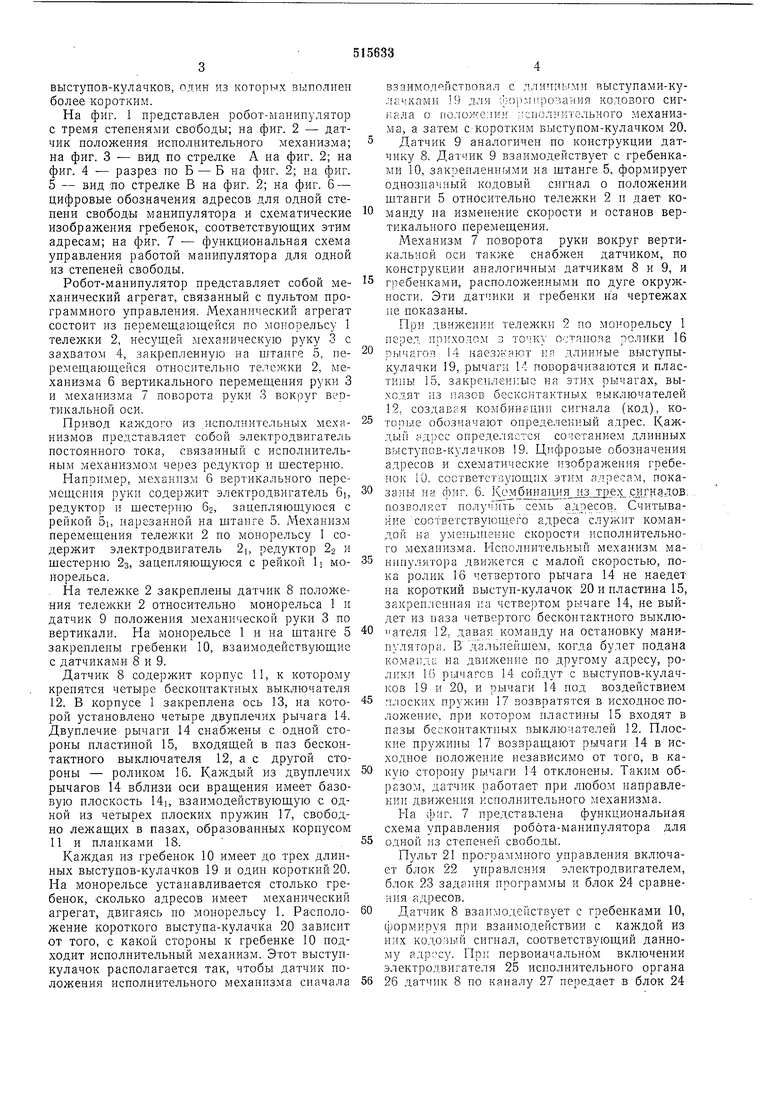
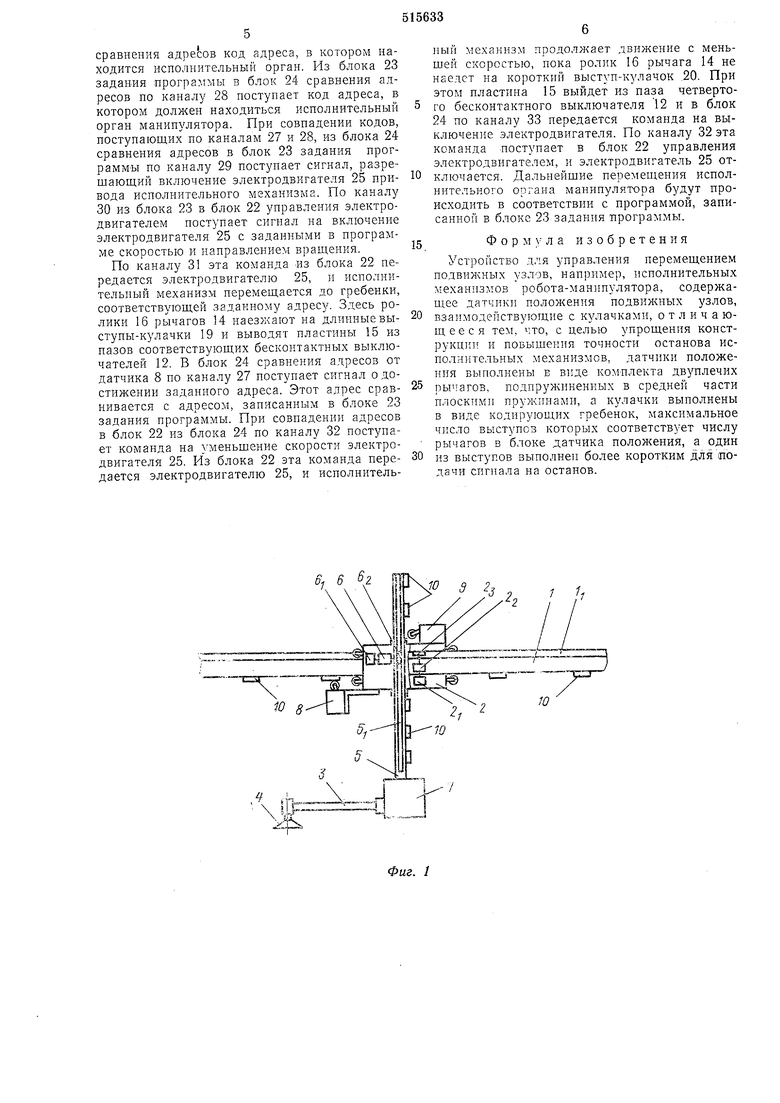
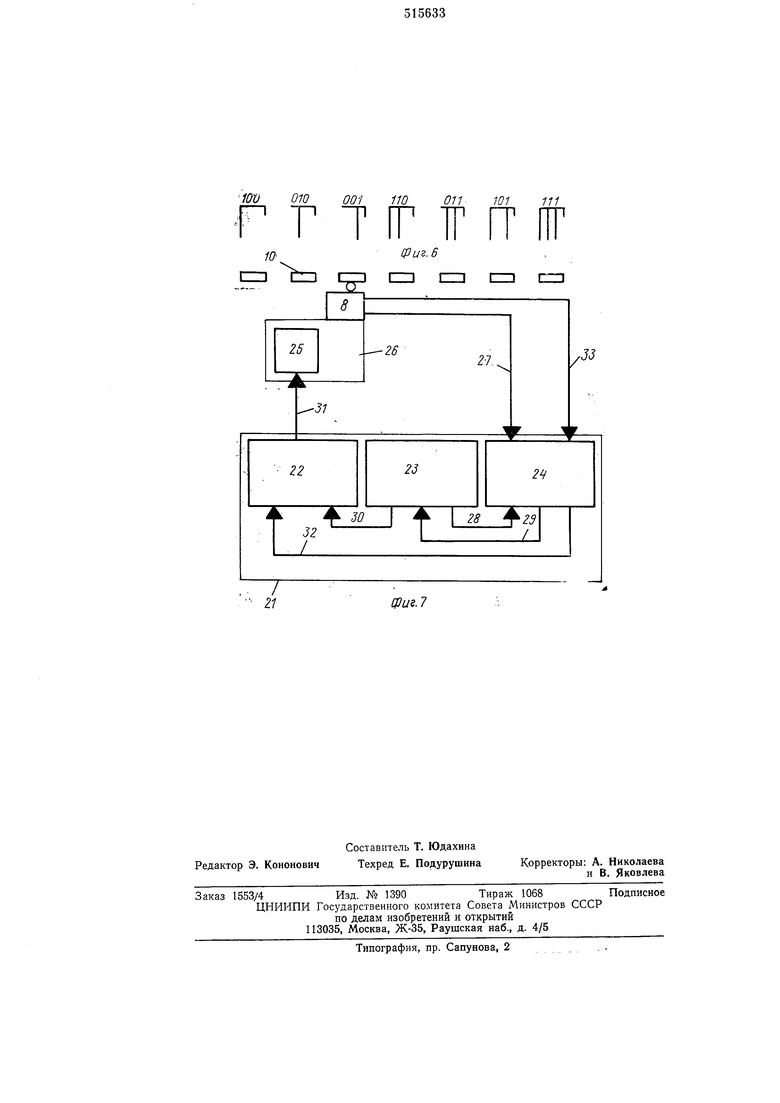
На фиг. 1 представлен робот-манипулятор с тремя степенями свободы; на фиг. 2 - датчик положения исполнительного механизма; на фиг. 3 - вид по стрелке А на фиг. 2; на фиг. 4 - разрез по Б - Б на фиг. 2; на фиг. 5 - вид ПО стрелке В на фиг. 2; на фиг. 6 - цифровые обозначения адресов для одной степени свободы манипулятора и схематические изображения гребенок, соответствуюпдих этим адресам; на фиг. 7 - функциональная схема управления работой манипулятора для одной из степеней свободы.
Робот-манипулятор представляет собой механический агрегат, связанный с пультом программного управления. Механический агрегат состоит из перемещающейся по монорельсу 1 тележки 2, несущей механическую руку 3 с захватом 4, закрепленную на штанге 5, перемещаюндейся относительно тележки 2, механизма 6 вертикального перемещения руки 3 и Д1еханизма 7 поворота руки 3 вокруг вертикальной оси.
Привод каждого из нсполнительных механизмов представляет собой электродвигате;1ь постоянного тока, связанный с исполнительным механизмом через редуктор и шестерню.
Например, механизм 6 вертикального перемещения руки содержит электродвигатель 6|, редуктор и шестерню 62, зацепляющуюся с рейкой 5i, нарезанной на штанге 5. Механизм перемещения тележки 2 по монорельсу 1 содержит электродвигатель 2i, редуктор 22 и шестерню 2з, зацепляющуюся с рейкой li монорельса.
. На тележке 2 закреплены датчик 8 положения тележки 2 относительно монорельса 1 и датчик 9 положения механической руки 3 по вертикали. На монорельсе 1 и на штанге 5 закреплены гребенки 10, взаимодействующие с датчиками 8 и 9.
Датчик 8 содержит корпус II, к которому крепятся четыре бесконтактных выключателя 12. В корпусе 1 закреплена ось 13, на которой установлено четыре двуплечих рычага 14. Двуплечие рычаги 14 снабжены с одной стороны нластиной 15, входящей в паз бесконтактного выключателя 12, а с другой стороны - роликом 16. Каждый из двуплечих рычагов 14 вблизи оси вращения имеет базовую плоскость 14i, взаимодействующую с одной из четырех плоских пружин 17, свободно лежащих в пазах, образованных корпусом 11 и планками 18.
Каждая из гребенок 10 имеет до трех длинных выступов-кулачков 19 и один короткий 20. На монорельсе устанавливается столько гребенок, сколько адресов имеет Л1еханический агрегат, двигаясь но монорельсу 1. Расположение короткого выступа-кулачка 20 зависит от того, с какой стороны к гребенке 10 подходит исполнительный механизм. Этот выступкулачок располагается так, чтобы датчик положения исполнительного механизма сначала
взаимодействовал с л,личиыми выступами-кулачками 19 для ф(1П розания кодового СНГкала о положении исполнительного механизма, а затем с коротким выступом-кулачком 20.
Датчик 9 аналогичен по конструкции датчику 8. Датчик 9 взаимодействует с гребенками 10, закрепленными на штанге 5, формирует однозначный кодовый сигнал о положении штанги 5 относительно тележки 2 п дает команду на изменение скорости и останов вертикального перемещения.
Механизм 7 поворота руки вокруг вертикальной оси также снабжен датчиком, по конструкции аналогичным датчикам 8 и 9, и гребенками, расположенными по дуге окружности. Эти датчики и гребенки на чертежах ае показаны.
При движении тележки 2 по монорельсу 1 перед приходом з точку остлпона ролики 16 рычаге:- 14 наезжают и длинные выступыкулачки 19, рычаги {. поворачиваются и пластины 15, закрепленные на этих рычагах, выходят из пазов бесконтактных выключателей 12, создавая комбинецип сигнала (код), коTOiiue обозначают определенный адрес. Каждый 5-|Д1)ес опреде.:1ястся сочетанием длинных выступов-кулачков 19. Цифровые обозначения адресов и схематические изображения гребенок 10, соответстБующих этим адресам, показаны на фиг. 6. KL IJJUIJIU из трех сигнал.ов. позволкет полуГить семь адресов. Считывание соответствуюш.его адреса служит командой на уменьшение скорости исполнительного механизма. Исполнительный механизм манипулятора движется с малой скоростью, пока ролик 16 четвертого рычага 14 не наедет на короткий выступ-кулачок 20 и пластина 15, закрепленная иа четвертом рычаге 14, не выйдет из паза четвертого бесконтактного выключателя 12, давая команду на остановку манипулятора. В дальнейшем, когда будет подана команда на движение по другому адресу, ролики К) рычагов 14 сойдут с выступов-кулачков 19 и 20, и рычаги 14 под воздействием плоских пружин 17 возвратятся в исходное положение, при котором пластины 15 входят в пазы бесконтактных выключателей 12. Плоские пружины 17 возвращают рычаги 14 в исходное положение независимо от того, в какую сторону рычаги 14 отклонены. Таким образом, датчик работает при любом направлении движения исполнительного механизма.
На фиг. 7 представлена функциональная схема управления робота-манипулятора для одной из степеней свободы.
Пульт 21 программного управления включает блок 22 управления электродвигателем, блок 23 задания программы и блок 24 сравнения адресов.
Датчик 8 взаимодействует с гребенками 10, формируя при взаимодействии с каждой из них кодовый сигнал, соответствующий данному адр;.су. При первоначальном включении электродвигателя 25 исполнительного органа 26 датчик 8 по каналу 27 передает в блок 24
сравнения адресов код адреса, в котором находится исполнительный орган. Из блока 23 задания программы в блок 24 сравнения адресов по каналу 28 ноступает код адреса, в котором должен находиться исполнительный орган манипулятора. При совпадении кодов, поступающих по каналам 27 и 28, из блока 24 сравнения адресов в блок 23 задания программы по каналу 29 поступает сигнал, разрешающий включение электродвигателя 25 привода исполнительного механизма. По каналу 30 из блока 23 в блок 22 управления электродвигателем ноступает сигнал на включение электродвигателя 25 с заданными в программе скоростью и направлением вращения.
По каналу 31 эта команда из блока 22 передается электродвигателю 25, и исполнительный механизм перемещается до гребенки, соответствующей заданному адресу. Здесь ролики 16 рычагов 14 наезжают на длинные выступы-кулачки 19 и выводят пластины 15 из пазов соответствующих бесконтактных выключателей 12. В блок 24 сравнения адресов от датчика 8 по каналу 27 поступает сигнал о достижении заданного адреса. Этот адрес сравнивается с адресом, записанным в блоке 23 задания программы. При совпадении адресов в блок 22 из блока 24 по каналу 32 ноступает команда на уменьщение скорости электродвигателя 25. Из блока 22 эта команда передается электродвигателю 25, и исполнительпыи механизм продолжает движение с меньщей скоростью, нока ролик 16 рычага 14 не наедет на короткий выступ-кулачок .20. При этом пластина 15 выйдет из паза четвертого бесконтактного выключателя 12 и в блок 24 по каналу 33 нередается команда на выключение электродвигателя. По каналу 32 эта команда поступает в блок 22 управления электродвигателем, и электродвигатель 25 отключается. Дальнейщие перемещения исполнительного органа манипулятора будут происходить в соответствии с программой, записанной в блоке 23 задания программы.
Формула изобретения
Устройство для управления перемещением подвижных узлов, например, исполнительных механизмов робота-манипулятора, содержащее датчики положения подвижных узлов, взаимодействующие с кулачками, отличающееся тем, что, с целью упрощения конструкции и поБыщения точности останова исполнительных механизмов, датчики положения выполнены в виде комплекта двуплечих рычагов, подпружиненных в средней части нлоскимн пружинами, а кулачки выполнены в виде кодирующих гребенок, максимальное число выступов которых соответствует числу рычагов в блоке датчика положения, а один из выступов выполнен более коротким для подачи сигнала на останов.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА АВТОМАТИЧЕСКОГО ПЕРЕКЛЮЧЕНИЯ ПЕРЕДАЧ СТУПЕНЧАТОЙ ТРАНСМИССИИ ТРАНСПОРТНОГО СРЕДСТВА И УСТРОЙСТВО БЛОКИРОВКИ МЕХАНИЗМА ПЕРЕКЛЮЧЕНИЯ ПЕРЕДАЧ ЭТОЙ СИСТЕМЫ | 2009 |
|
RU2409782C2 |
| СИСТЕМА АВТОМАТИЧЕСКОГО ПЕРЕКЛЮЧЕНИЯ ПЕРЕДАЧ СТУПЕНЧАТОЙ ТРАНСМИССИИ ТРАНСПОРТНОГО СРЕДСТВА | 2003 |
|
RU2259505C1 |
| Автоматическая линия для транспортировки полуфабрикатов | 1973 |
|
SU653186A1 |
| Манипулятор | 1972 |
|
SU441141A1 |
| "Устройство для программированного возделывания растений "Фитобазис" | 1990 |
|
SU1813317A1 |
| Установка для изготовления биметаллических деталей | 1982 |
|
SU1069941A1 |
| Гибкий производственный модуль для листовой штамповки | 1988 |
|
SU1667994A1 |
| Загрузочное устройство | 1982 |
|
SU1024223A2 |
| Станок для изготовления секций электрических машин | 1972 |
|
SU493862A2 |
| Устройство для резки и сборки проводов в пакет | 1983 |
|
SU1302385A1 |
Фиг. 1
16
Ю
Фи.2
Б-В
fOus.
ВидА
пЗ
Е5т
fpus.S001 110 oil 101 111
т ГГ IT ГТ ПГ
Vuz. 6 р си cm CD CZD
Фиг. 6
32
27,
/
21
Сриг.7
