р(1К()ммуниклций и об€ сг счения их со- храннсн ти. /1ля этог() опорный стакан 1/ жестко связан с кареткой 3, а сред ства распр(5делення пот(жов жидкости пыполнены в виде каналов в тело этого опорног о стакана 17, Наружное зне- но 20 телескопической штанги 6 сопряжено с опорным стаканом 17, во флан- це13ой части которого выполнено отверстие с расположсмшым в нем под1
Изобретение относится к автоматическим манипудтяторам или промыиьтен- ным роботам и может быть использовано для 1 ростраистБе,ниого перемещения и орисмп ации объектов большой масел,.
Целые изобретения является повышение надежности и быстродействия за счет уменьшения протяженности гидро- коммуникапий и обеспечения их сохранности.
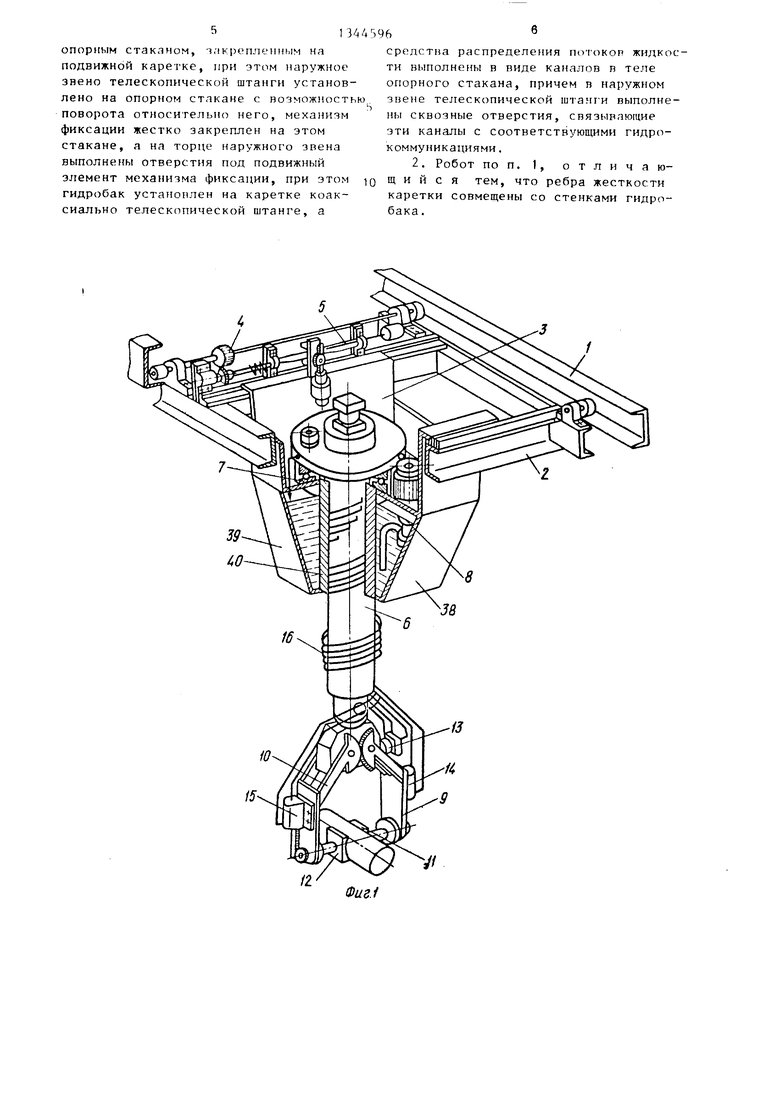
На фиг. 1 изображои промы111ле}шый робот, с частичным разрезом; на фиг. 2 - телескопическая штанга, разрез; на фиг, 3 - механизм фиксации наружного звена телесксшической штанги и относителык опорного стакана, р а 3 р е- 3 .
np(M iiiii,iienn iH i робот содержит неподвижные направляющие 1, подвижный портал 2, подв1гжиуш вдоль портала каретку 3, приводы 4 и 5 перемещения портала 2 и каретки 3, выдвижную телескопическую штангу 6, механизм 7 ее поворота, гидроста 1ци1о 8, размещенную на подвил ой каретке 3, рабочий орган, включающий, например раздвижные рычаги 9 и 10с поворотными губками 11 и 12. Раздвижные р 1чаги 9 и 10 приводятся в действие гидрот;илинд- ром (или гидродвигателем) 13, а поворотные губки 11 и 12 - гидроцилиндрами 14 и 15. Упомянутые гидроцилиндры 13 - 15 соединены с гидростанцией 8 и управляющими золотниками (гидрораспределителями) гидрокоммуникатщя- ми, вк5почающими систему гибких шлангов 16 и средства распределения потоков рабочей жидкости, которые совмещены с механизмом 7 поворота выдвижпружиненным подвижным элементом 23 механизма фиксации, а на торцовой поверхности наружного звена 20 выполнены соответствующие фиксирующие гнезда под этот подвижный элемент. Гидробак закреплен на каретку, и его стенки 39 и 40 образуют конструкцию коробчатой формы и совмещены с ребрами жесткости подвижной каретки 3. 1 з.п. ф-лы, 3 ил.
ной телескопической штанги 6. С подвижной кареткой 3 жестко связан опорный стакан 17, а средства распределения потоков жидкости выполнены в виде каналов в теле опорного стакана 17 (на фиг. 2 показан канал 18 сбора утечек и один из каналов 19, соединенных с гидростанцией 8 через управ0 ляемые гидрораспределители). Наружное звено 20 телескопической штанги 6 опирается на подшипник 21 качения и сопряжено с опорным стаканом 17, во фланцевой части которого выполне5 но отверстие 22 с расположенным в нем подпружиненным подвижным-элементом 23 механизма фиксации, а привод 24 расположен на торцовой части опорного стакана 17. lia верхней торцовой
0 поверхности наружного звена 20 выполнены соответственно фиксирующие гнезда 25 для Ьодвижного элемента. Внутреннее звено 26 телескопической штанги проходит внутри как наружного зве5 на 20, так и опорного стакана 17. Верхняя часть поверхности внутреннего звена 26 составляет резьбовую пару с ходовым винтом 27, а с наружной поверхностью - звено 26 имеет две шпоQ ночные канавки 28 (или шлицевое соединение) по всей длине. В нижней части наружного звена 20 установлены соответственно две шпонки 29, удерживающие звено 26 от проворачивания.
Механизм выдвижения телескопической штанги 6 состоит из ходового винта 27 и управляемого гидродвигателя 30. Ходовой винт 27 в верху имеет упорный буртик 31, в который упирается звено 26 в крайнем верхнем положении, а к нижнему торпу холинпгм пинта 27 прикреплен другой унорньп буртик (не иокаэлн), предохраняющий от разъединения ходовой винт 27 с внутренним зве)1ом 26.
На внутренней поверхности наружного звена 20 выполн;.иы кольцеи.1е канавки 32 - верхняя и нижняя, сообщающиеся между собой и предназначенные для отвода утечек рабочей жидкости из районов уплотнения опорного стакана 17 и наружного звена 20 те.ле- скопической штанги 6, рабочие кол1,- цевые канавки 33 и 34 для гидроцилиндра 13 и 35 и 36 для гидроиили д- ров 14 и 15, число которых определяется числом степеней свободы исполнительного органа. Чтоб1,1 иср ;лтчит влияние одного привода на другой между парами указа ных рабочих канавок выполнена канавка 37 для сбора утечек из полости средства распределения потоков рабочей жидкости. Стенки 38 и 39 гидробака образуют конструк- дию коробчатой формы и ее стенки совмещены с ребрами жесткости подвижной каретки 3. Внутри гидробака коакси- ально расположен дополнительный опорный стакан 40, через который проходит вьщвижная телескопическая штанг а 6, чем достигается компактность всего устройства.
Промышленный робот работает следующим образом.
В соответствии с программой (либо иным управляющим воздействием) подвижный портал 2 и подвижная вдоль портала 2 каретка 3 выходят за заданную координату, после чего опускается на заданную высоту внутреннее звено 26 с исполнительным органом, у которого поворотные губки 1 1. и 12 раздвижными рычагами 9 и 10 приводятся в заданное положение (обычно раздвигаются) и ориентируются в заданной вертикальной и горизонтально плоскости поворотом как самих губок 11 и 12, так и поворотом наружного звена 20 вьщвижной телескопической штанги 6,установленной в дополнительном опорном стакане 40. После выхода промышленного робота в заданную точку пространства и ориентации исполнительного органа подают команду на захват объекта, что вызывает перемещение раздвижных рычагов 9 и 10 до захвата объекта поворотными губками 11 и 12. Захваченный объект снимают
/ V bс ложементоч и трансисртируыт и нужную точку njMiCTpaFiCTpa, при -ITHM в пр(|цессе транспортировки и luvn-cf-ia возможна переориентация объекта (поворот губок 11 и 12, поворот вьщвижной телескопической штанг и 6). Телескопическая штанга 6 может поворачиваться как в крайних (рерх- ,Q нем или нижнем) положениях, так и в интервале между ними, т.е. на любой высоте в соответствии с программой. Поворот телескопической штанги 6 осуществляется следующим образом. Не ,с включая гидродвигатель 30, в процессе подъема нпи опускания внутреннего звена 26 подается команда на гидропривод (гидроцилиндр) 24, который выводит подвижный элемент 23 механизма ()иксации из гнезда 25 наружного звена 20 телескопической штанги 6 и, имея в виду, что трение качения в подшипнике 21 механизма 7 поворота на порядок меньше, чем трение сколь- 2Г; жеиия в резьбовой паре, это позволяет телескопической штанге 6 осуществить поворот до западания подвижного элемента 23 в нужное по программе следующее гнездо 25 на торцовой по- т ерхности наружного звена 20. Таким образом, благодаря механизму 7 поворота, совмещенному с узлом распределения потоков рабочей жидкости, осуществляется поворот телескопической штанги 6 вокруг вертикальной оси на заданный угол. Поворот может осуществляться в любую сторону, начиная от ми1Н1мального угла заданного в программе, до постоянного вращения.
0
0
40
Формула изобретения
1 . Промьшшенный робот, содержащий подвижный портал, каретку, подвижную вдоль портала и несущую телескопическую штангу, .на внутреннем звене которой закреплен рабочий орган, механизм ее раздвижения и поворота, гидропривод перемещения зажимных элементов рабочего органа и гидростанцию, имеюцую гидробак, гидрокоммуникации, связанные с соответствующими гидроприводами, и средства распределения потоков, отличающийся тем, что, с целью повьш1ения надежности и
быстродействия за счет уменьшения протяженности гидрокоммуникаций и обеспечения их сохранности, он снабен механизмом фиксации наружнсп о звена телескопической штанги и полым
5
опорным стаканом, т.чкрепленным на подвижной каретке, при этом наружное звено телескопической штанги установлено на опорном стакане с возможность поворота относительно него, механизм фиксации жестко закреплен на этом стакане, а на торце наружного звена выполнены отверстия под подвижный элемент механизма фиксации, при этом гидробак установлен на каретке коак- сиально телескопической штанге, а
ГЗ/чА396
средства распределения no i OKon жидкости выполнены в виде каналов в теле опорного стакана, причем в наружном звене телескопической штанги выполнены сквозные отверстия, связывающие эти каналы с соответствующими гидрокоммуникациями .
2. Робот по п. 1, отличающийся тем, что ребра жесткости каретки совмещены со стенками гидробака.
Ш
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТАНОВКА ДЛЯ ВЕРТИКАЛЬНОЙ РАЗДЕЛКИ И ОБВАЛКИ ТУШ УБОЙНЫХ ЖИВОТНЫХ | 1990 |
|
SU1748305A1 |
| УСТРОЙСТВО для ПЕРЕГРУЗКИ ШТУЧНЫХ ГРУЗОВ | 1968 |
|
SU213307A1 |
| ПРОХОДЧЕСКИЙ КОМПЛЕКС | 1998 |
|
RU2172405C2 |
| МАШИНА ДЛЯ КОНТУРНОЙ ЧЕКАНКИ ПОБЕГОВ ВИНОГРАДНОЙ ЛОЗЫ | 2024 |
|
RU2839884C1 |
| Гибкая автоматизированная линия | 1988 |
|
SU1668104A1 |
| Машина для отделочных работ | 1987 |
|
SU1498899A1 |
| Телескопическое захватное устройство | 1986 |
|
SU1390133A1 |
| УСТРОЙСТВО ДЛЯ ПЕРЕМЕЩЕНИЯ ГРУЗОВ, ПРЕИМУЩЕСТВЕННО ЗА ПРЕДЕЛАМИ НАХОДЯЩЕГОСЯ НА ОРБИТЕ КОСМИЧЕСКОГО КОРАБЛЯ | 2000 |
|
RU2167084C1 |
| Устройство для пакетирования кольцеобразных изделий | 1983 |
|
SU1141052A1 |
| ЛЕНТОЧНО-ПИЛЬНЫЙ СТАНОК | 1998 |
|
RU2139182C1 |

Изобретение относится к области техники промышленных роботов и автоматических манипуляторов, может быть использовано для пространственного перемещения и ориентации объектов большой массы при погрузоразгруэочных работах. Целью изобретения является повышение надежности и быстродействия за счет уменьшения протяженности гидел 00 4; ел со О5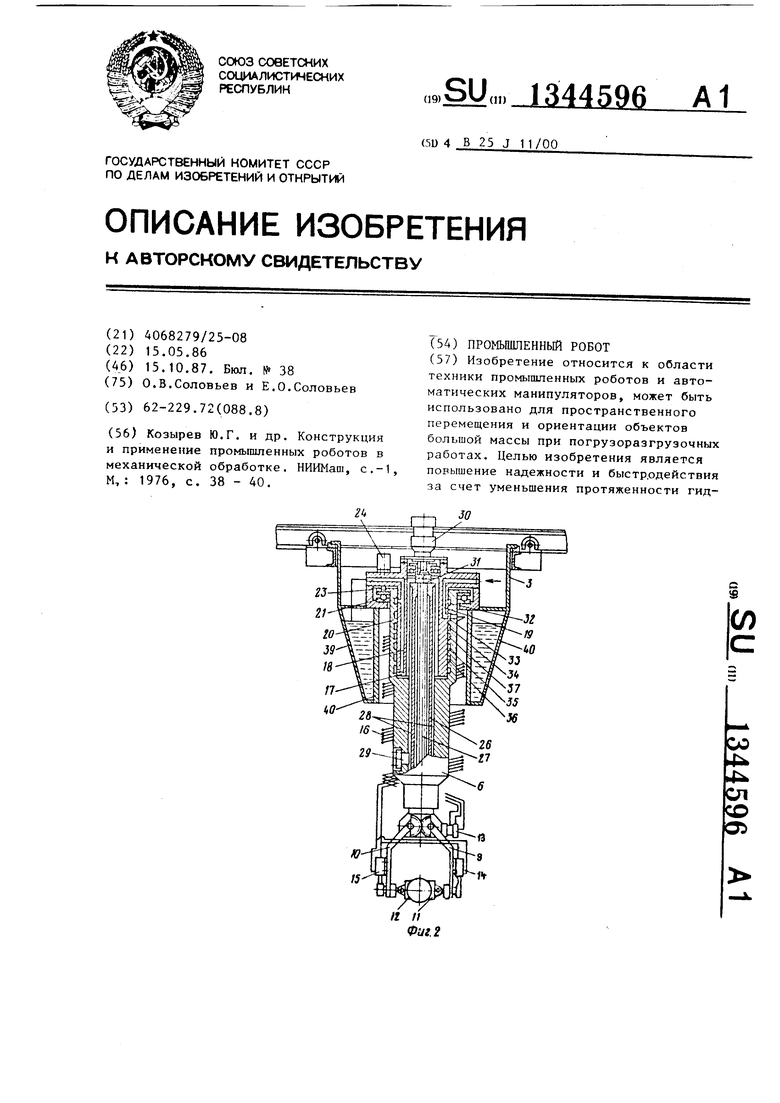
V/
Фиг.1
Составитель И.Бакулина Редактор Ю.Середа Техред Л.Олийнык
Заказ 4882/17 Тираж 951Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
- - -- - -- ..«.В.«««.К«. 1.
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
Корректор И.Муска
| КозыревЮ.Г | |||
| и др | |||
| Конструкция и применениепромышленных роботов в механическойобработке | |||
| НИИМаш, с.-1, М, : 1976, с.38 - 40. |
