Изобретение относится к машиностроению, в частности к вакуумным захватам с автоматическим унравлением, и может быть использовано для захвата плоских изделий.
Целью изобретения является повышение надежности.
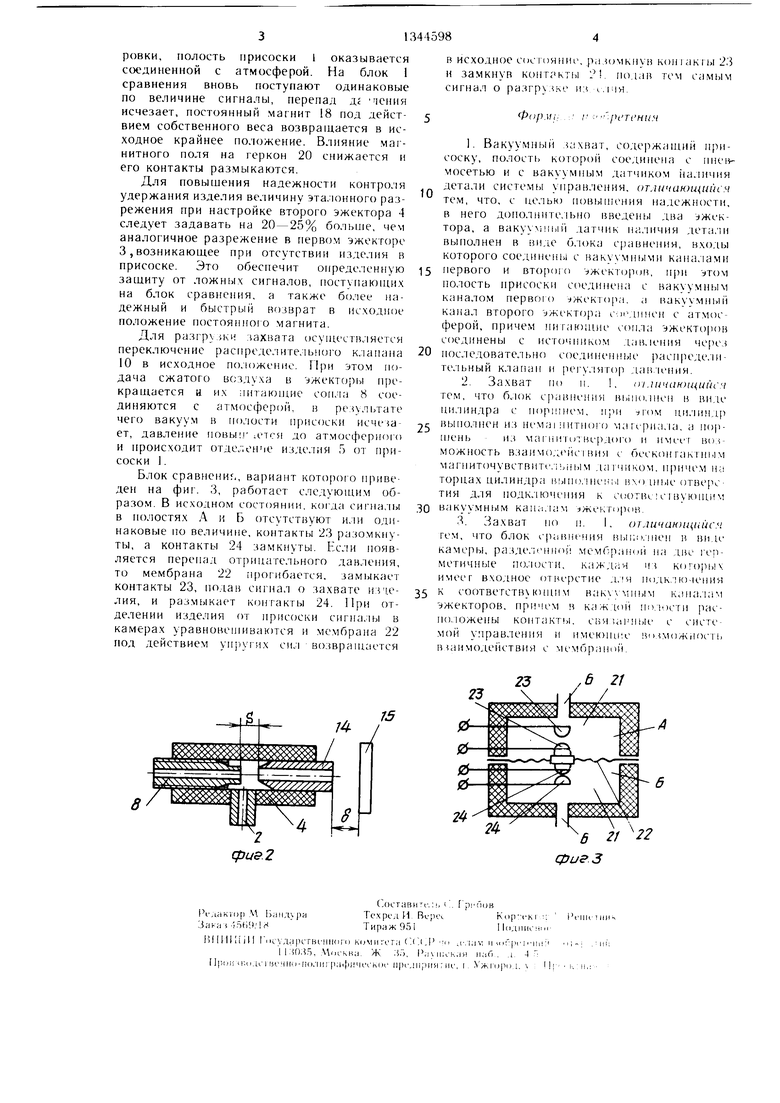
На фиг. 1 схематически показан вакуумный захват; на фиг. 2 - регу.жруе- мый эжектор, общий вид; на фиг. 3 - блок сравнения.
Вакуумный захват (фиг. 1) содержит присоску 1, полость которой сообщена с вакуумным каналом 2 первого эжектора 3, а также - второй эжектор 4, который обеспечивает эталонное разрежение, разное по величине разрежению в полости присоски при отсутствии изделия 15. Вакуумные Kaii;i;ibi эжекторов по.асоединены к входным 1птуцерам 6 б;1ока 7 сравнения пневматических н.ч. иж Одновременно накуум- ный канал Brupoi o эжекгора постоянно соединен с атмосферой. Питаюшие сонла 8 эжек1()в подкл.ючсны к нормально откры- т(.)му входу М ;)ас11)еде. 1ителы1ого клапана 10, который соединяется с атмосферой. Нормально ,акр1)1ты11 11 распределн- Te.ibHoni клапана подключен к регулятору 12 давления. .-)тим обеспечивается подключение эжекторов к источнику сжатого воздуха только во время захвата изделия и их соединение с атмосферой при холостом ходе. Подключение всех устройств осуществляется посредством соедипительных грубопрово- дов 13. Питак)И1ее селило второго эжектора выполнено с в(.)зможностью перемешения относительно выходногс.) сопла 14 (фиг. 2), например, за счет резьбового соединения Это 11озво.1яе1 li. iaBHO изменять расстояние S. а следовательно, и величину разрежения, создаваемого данным эжекторо.м. Допо. жи- тельно разрся;ение может регулироваться посредством изменения зазора Л между выходным соплом и зас.юнкой 15.
1 Блок сраннения (фиг. 1) выполнен в виде цилиндра И) из нсмагнитног о материа.1а с внутренне иодостью 17, в которой усга- новлен порн1ень 18. вынолненный из магни- тотвердеюшегч) магерпала, т. е. представляет собой и(;сгоянный магнит. В полости 19 установлен бесконтактный магниточувстви- тельный датчик 20, например геркон, сра- батываюншй при взаимодействии с магнитным полем п()pпJня 18 и выдающий сигнал в сис1ему управл.ення (не показана) п)и наличии детали на присоске 1.
Вариант блока сравнения приведен на фиг. 3. Блок вып().1нен в виде камеры 21, разде.ченной мембраной 22 на две герметичные ио. Юсги . и Б, каждая из которых снабжена входным ппупером 6. В полости А смонтированы нормально разо.мкну- тые контакт.) 23 с в(;змож остью замыка 1ИЯ от Мембра). в ОЛОСТ 1 Б -
нормально )1е ко 1такт 1 24 с возможностью размыкания ог 1рогиба мембраны.
Вакуумный захват рабогаег следуюшим образом.
Требуемое давление сжатого воздуха устанавливается регулятором 12 давления (фиг. 1). В 1сходном оложении распределительный клапан 10 нерекрывает подачу сжатого воздуха к эжекторам 3 и 4, соединяя их при этом с атмосферой, вакуум, в полости присоски 1 отсутствует. Это необходимо, например, пр холостом ходе руки робота с вакуумным захватом для экономичного использования сжатого воздуха.
5 При ереводе захвата в рабочее состояние нроизводится нереключение распределительного 10; его нормально от- вход 9 закрывается, а нормально закрытый вход 11 открывается. Сжатый воздух по соеди 1ител ым трубо роводам
0 13 иоступает одновременно в нервый эжектор 3 и второй эжектор 4. Если при этом изделие 5 в рисоске 1 будет отсутствовать, то вакуумный 2 эжектора 3, как и эжектора 4, окажется соеди {ен 1ым
г с атмосферой. Поэтому пневматические сиг- 1алы в виде отрицательного давления (раз- ), 1осту аюц1,ие через входные пту- цера 6 на блок 7 срав 1ения, одинаковые по величине. Одинаковая величина разрежения определяется общим источником пиQ тания, а также дополнительным регулиро- расстояния S или зазора 6 при настройке захвата (фиг. 2) 1осредством переме 1епия соответственно входного 8 ли заслонки 15 от Юситель- но выходного сопла 14. Перепад давления
5 Q герметичпой ()лости 17 блока 7 сравнения практически отсутствует (фиг. 1). Следова- тел)Но, на постоянный магнит 18 действует ;олько собственный вес, поэтому он находится в крайнем ь ижнем юложении. При этом сигнал на выходе блока сравне0 ПИЯ отсутствует. При .(ахвате изделия 5 г олость рисоски 1 ерекрывается, т. е. образуется замкнутое пространство, величина разрежения в котором значительно (в 10-15 раз) возрастает но сравнению с разрежением в вакуумном канале дополнительного эжектора 4, 1остоянно соеди- ненно о с атмосферой. При этом в нолости 17 блока 7 сравнения возникает перепад отрицатель ого давления, |)езультируюи1ая сила которого а равле 1а в cTOpO iy больQ разрежен 1я. Под дсйств1 ем этой силы постоя)ный магнит 18 1 еремен1ается в верхнее юложе ие (ia . 1 показа Ш пу жтиром). Расстояние между ним и геркоиом 20 сокращается так, что магнитное поле магнита замыкает контакты
5 геркона. которые г одают электрический сигнал о захвате присоской изделия. В случае езахвата изделия или его отрыва от 1рисоски, например во время транспорти5
ровки, полость присоски 1 оказывается соединенной с атмосферой. На блок 1 сравнения вновь поступают одинаковые по величине сигналы, перепад дг юния исчезает, постоянный магнит 18 под действием собственного веса возвращается в исходное крайнее положение. Влияние магнитного поля на геркон 20 снижается и его контакты размыкаются.
Для повышения надежности контроля удержания изделия величину эта;1онного разрежения при настройке второго эжектора 4 следует задавать на 20 - 25% больше, чем аналогичное разрежение в первом эжекторе 3, возникающее при отсутствии изделии в присоске. Это обеспечит определенную защиту от ложньгх сигналов, поступаюши.х на блок сравнения, а также более надежный и быстрый возврат в исходное положение постоянного магнита.
Для разгр.;ки захвата осуществ.мяется переключение распределительного клапана 10 в исходное по.южение. При этом подача сжатого вс;здуха в эжeкт(Jpы прекращается н их ;1итаю1дие сопла 8 соединяются с атмосферой, в ре. чего вакуум в полости присоски исчезает, давление повьи ачся до атмосферного и происходит отделонпе изделия 5 от присоски 1.
Блок сравнение, вариант которого приведен на фиг. 3, работает следующим образом. В исходном состоянии, когда сигна.чы в полостях А и Б отсутствуют или одинаковые по величине, контакты 23 разомкнуты, а контакты 24 замкнуты. Если появляется перепад отрицательного давления, то мембрана 22 Г1)огибается, замыкает контакты 23, подан сигнал о захвате изче- лия, и размыкает кг)игакты 24. При отделении изделия от присоски сигналы в камерах уравновеишваются и мембрана 22 под действием ун|)угих си;| возврап1ается
в исходное состояние, разомкнув к()Н1ак1Т 1 23 н замкнув контг кты 2. подав тем самым сигна,п о разгрхз.ке из г.1ия.
ретения
5
0
5
0
5
1.Вакуумный захват, содержащий присоску, полость которой соединена с пнен- мосетью н е вакуумным датчиком ((аличия детали системы упранления. отличающписч тем, что, с ) повьпнения надежности, в него дополните.|ьно введены два эжектора, а вакуумный датчик иаличня детали выполнен в виде б.ижа сравнения, вхо.чы которого соедииень с кана.1амн первого и эжcкт(JpoF, 111)и этом полость присоски соединена с вакуумным каналом первшо эжектора, а вакуумньп канал второго эжектора C : iMiniCH с атмосферой, причем нигаюашс сопла эжект1)|1)в соединены с источ инком дав.к ния чс)ез последовательно соединенные распределительный клапан и регу.1ят()р дан/н ния.
2.Захват по п. I, о/.тчаю/циися тем, что блок сравнения выпо.шсп в виде пи. щндра с норшнем. при ци.чиндр выполнен из Щ ма: митногг) ма 1Ч ри;|.1а. а поршеньиз Mai iiM rui и noi- можность взаимо.чейс ВИЯ с бесконтактным 1ап1иточувствитг. 1ьиым .чагчиком. и|1ичем н-:: торцах цилиндра шлио/шсим и1ые отверстия для подключения к COOTBI, С1ВуЮ|ЦИМ
вакуумным .1ам эжекто|)(1Н.
3.Захват но п. I, огличанициис.ч гем, что блок с|)авнеиия выг.к/шен в виде камеры, раздел1М1Нп MeMOpaiuni на дио I cp- мстичные п(х:|(Х ти, каждая из кого|) имеет входное отверстие д. я П(|дключепия к соответствующим капа.шм эжекторов, причем в каждой милости рас- но.южены контакты. cBHsaiMibie с системой у.чравлення н имеюни е нмзмож11ост1, в 1аимоде11ствия с мембрапо11.
24
фигЗ
1 лакт1)) ЛД Ьандх ра Зака t -SStiOMri
(оставите.;, (. Г pi-noB ToxptM И Bi-pciK(ip-cKi :;
Тираж 9511 l(i,uiiic ii.(
1СУДарств1 |||1 11 1) комплота ( i.l.l i I .iavi и ч ГргМ И : I I :i():i.5, ЛАосква, Ж :i.). Pjniix h.iH nad , л
П) ir.lJ.U l DeMllil-lHj. lll |1аф)Ч1Ч К(П ПрГЛИрИЯ; IK . I ЖГ1)|Ч) 1. M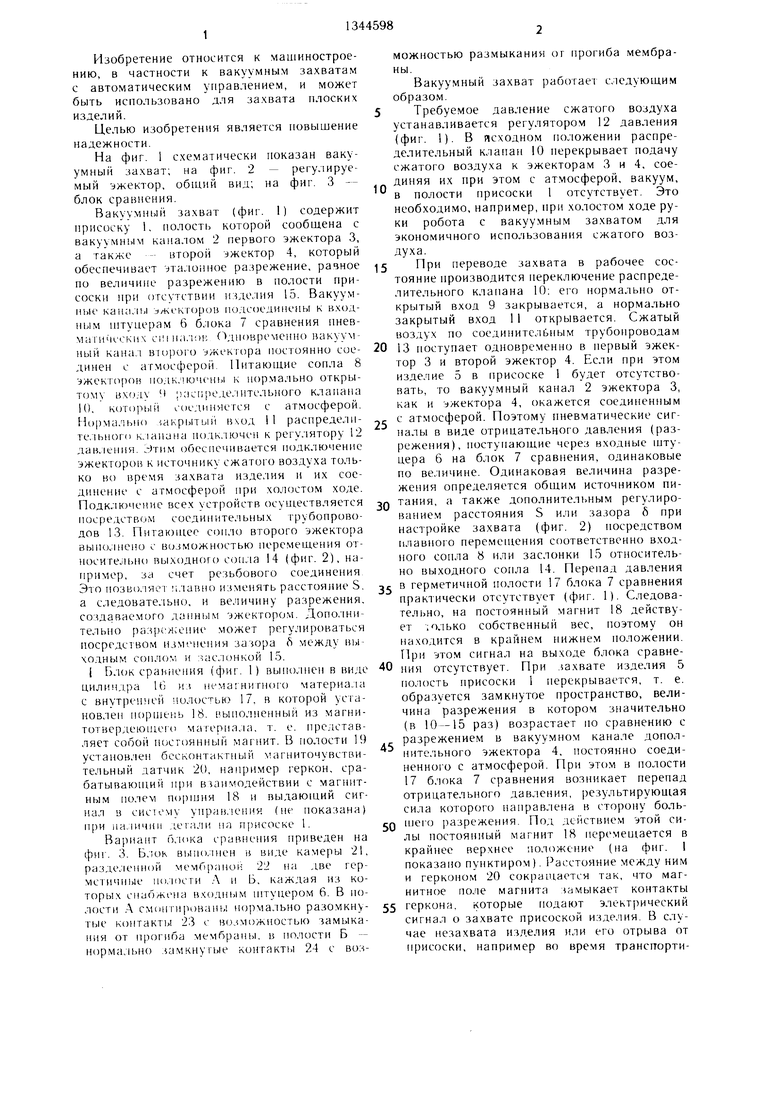
| название | год | авторы | номер документа |
|---|---|---|---|
| Вакуумный захват | 1988 |
|
SU1705068A1 |
| ОЧУВСТВЛЕННЫЙ ВАКУУМНЫЙ ЗАХВАТ | 2005 |
|
RU2283751C1 |
| Система управления вакуумного захватного устройства | 1988 |
|
SU1736896A1 |
| Вакуумное захватное устройство | 1976 |
|
SU624860A1 |
| Вакуумное захватное устройство | 1990 |
|
SU1776558A1 |
| Вакуумное захватное устройство | 1981 |
|
SU1036657A1 |
| Вакуумное захватное устройство | 1989 |
|
SU1815217A1 |
| Система управления вакуумного захватного устройства | 1982 |
|
SU1122599A1 |
| Устройство для отделения и подачи плоских изделий из стопы | 1975 |
|
SU539816A1 |
| Вакуумный захватный орган | 1985 |
|
SU1294434A1 |
Изобретение относится к машиностроению, в частности к вакуумным захватам, и может быть использовано для захвата плоских изделий. Цель изобретения - повышение надежности. Для этого датчик наличия детали выполнен в виде блока сравнения 7. Блок сравнения срабатывает и выдает сигнал в систему управления при перепаде давления в вакуумных каналах 2 первого 3 и второго 4 эжекторов. Вакуумный канал эжектора 3 соединен с полостью присоски I. В вакуумном канале второго эжектора 4 создается эталонное разрежение. Перепад давления возникает при захвате присоской изделия 5. Питающие сопла эжекторов соединены с источником сжатого воздуха через последовательно соединенные распределительный клапан 10 и регулятор давления 12. 2 з. п. ф-лы, 3 ил. СО i 4: сл со 00 cfJuB.i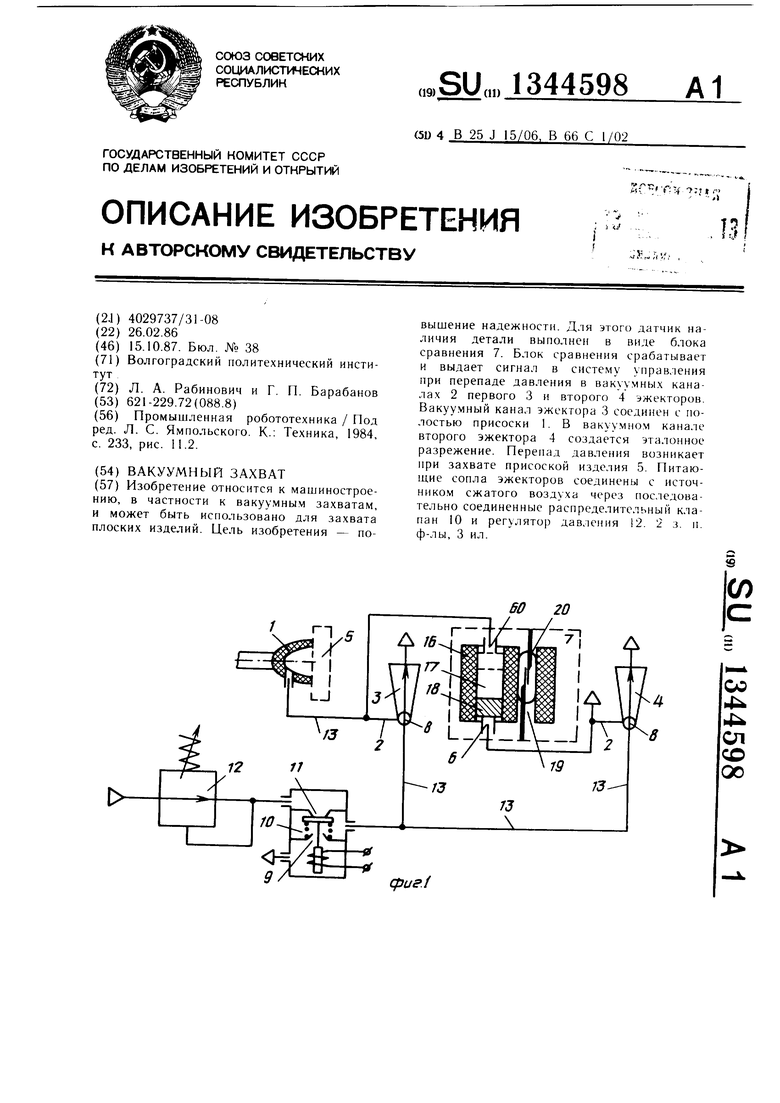
| Промышленная робототехника / Под ред | |||
| Л | |||
| С | |||
| Ямпольского | |||
| К.: Техника, 1984, с | |||
| Крутильный аппарат | 1922 |
|
SU233A1 |
| Походная разборная печь для варки пищи и печения хлеба | 1920 |
|
SU11A1 |
