о®
чО
о
. Изобретение относится к роботостроению и может быть применено при транспор- тировании деталей с использованием промышленных роботов с пневмоприводом и вакуумными схватами.
Известно вакуумное захватное устройство, содержащее пневмоприсос, соединенный одновременно с эжектором и воздухораспределителем, имеющим дополнительный клапан для импульсной подачи давления в вакуумную камеру (полость присоски) при освобождении детали. В течение всего времени работы устройства (транспортировка, продувка при сбросе детали) сжатый воздух поступает в канал эжектора и выходит в атмосферу. Импульсная подача давления в вакуумную камеру осуществляется при подаче электрического сигнала на электромагнитный клапан, продолжительность пневматического импульса зависит от продолжительности электрического сигнала, а регулировка длительности электрического сигнала усложняет систему управления.
Устройство не обеспечивает регулировку чмпульса давления, что может привести к потере позиционирования при освобождении детал, особенно когда деталь имеет малый вес, или к повреждению, когда деталь - хрупкая.
Наиболее близкой к предлагаемому является система управления вакуумного захватного устройства, содержащая двухходовой распределительный клапан, установленный между выходам источника сжатого воздуха и входом эжектора, полость которого соединена с вакуумными захватами, а между выходом эжектора и атмосферой установлен трехходовой двухпозиционный клапан, ктретьему каналу которого подведен сжатый воздух.
В известном устройсч ве изменяется направление потока сжатого воздуха либо на зжекцию, либо на продувку пневмоприсоса и сброс детали, при этом сжатый воздух постоянно выпускается в атмосферу через двухходовой клапан, эжектор и трехходовой клапан или черезтрехходовой клапан, эжектор и присос, что вызывает большой расход сжатого воздуха.
Цель изобретения - улучшение эксплуатационных свойств путем повышения экономичности работы.
Указанная цель достигается тем, что в системе управления вакуумного устройства, содержащем электрически управляемый двухпозиционный воздухораспределительный клапан, установленный между выходом источника сжатого воздуха и входом эжектора, вакуумная полость которого соединена с вакуумным захватом, и дополнительный двухпозиционный воздухораспределителе
ный клапан с входным и выходным клапанами для сообщения выхода источника сжатого воздуха с полостями присоски и эжектора, электрически управляемый клапан выполнен
четырехходовым, входы которого соответственно соединены с источником сжатого воздуха, атмосферой, входом эжектора и входным каналом дополнительного клапана, при этом дополнительный клапан выполнен
0 пневмоуправляемым, его управляющая полость соединена с четвертым входом электрически управляемого клапана через дроссель, а выходной канал соединен с вакуумной полостью эжектора.
5 Дроссель выполнен регулируемым.
На чертеже изображено вакуумное захватное устройство.
Система управления вакуумного захватного устройства содержит вакуумный захват
0 1 с полостью 2, соединенный с вакуумной полостью эжектора 3 и с выходным каналом дополнительного двухпозиционного воздухораспределительного клапана 4, управляющая полость которого соединена через
5 регулируемый дроссель 5 с четвертым выходом электрически управляемого двухпозиционного четырехходового клапана б, выходы которого соответственно соединены с источником сжатого воздуха, атмосферой через об0 ратный клапан 7, входом эжектора 3 и выходным каналом дополнительного клапана 4, Вакуумный захват 1 предназначен для захвата детали 8.
Система управления вакуумного захват5 ного устройства работает следующим образом,
При захвате детали 8 вакуумным захватом 1 сжатый воздух, подаваемый на вход электрически управляемого двухпозицион0 ного четырехходового воздухораспределительного клапана 6, свободно проходит через него и подается на вход эжектора 3. При этом во время захвата детали 8 в вакуумной полости эжектора 3 и в полости 2
5 вакуумного захвата 1 создается разрежение, а выходной канал дополнительного воздухораспределительного клапана 4 закрыт обратным клапаном 7.
При переключении воздухораспредели0 тельного клапана 6 сжатый воздух подается на вход дополнительного клапана 4, а с его выхода - в вакуумную полость эжектора 3, очищая его от грязи, и в полость 2 вакуумного захвата 1, при этом сбрасывается деталь
5 8 и продувается вакуумная полость 2. Одновременно при переключении клапана б сжатый воздух подается на управляющий канал клапана 4 через дроссель 5, который обеспечивает задержку переключения дополнительного клапана 4. В результате переключения
дополнительного клапана 4 входной канал, находящийся под давлением, и выходной канал разъединяются, Регулировкой дросселя изменяется длительность переключения дополнительного клапана 4, т.е. длительность импульса сброса.
Предлагаемая система управления вакуумного захватного устройства обеспечивает быстрое освобождение детали, минимальный расход сжатого воздуха и высокую надеж- ность работы вакуумного захвата. Формула изобретения 1. Система управления вакуумного захватного устройства, содержащая электрически управляемый даухпозиционный воздухораспределительный клапан, установленный между выходом источника сжатого воздуха и входом эжектора, вакуумная полость которого соединена с вакуумным захватом, и дополнительный двухпозицион-
ный воздухораспределительный клапан с входным и выходным каналами для сообщения выхода источника сжатого воздуха с полостями присоски вакуумного захвата и эжектора, отличающаяся тем, что, с целью улучшения эксплуатационных свойств путем повышения экономичности работы, электрически управляемый клапан выполнен четырехходовым, входы которого соответственно соединены с источником сжатого воздуха, атмосферой, входом эжектора и входным каналом дополнительного клапана, при этом дополнительный клапан выполнен пневмоуправляемым, его управляющая полость соединена с четвертым входом электрически управляемого клапана через дроссель, а выходной канал соединен с вакуумной полостью эжектора.
2. Система по п. 1,отличающаяся тем, что дроссель выполнен регулируемым.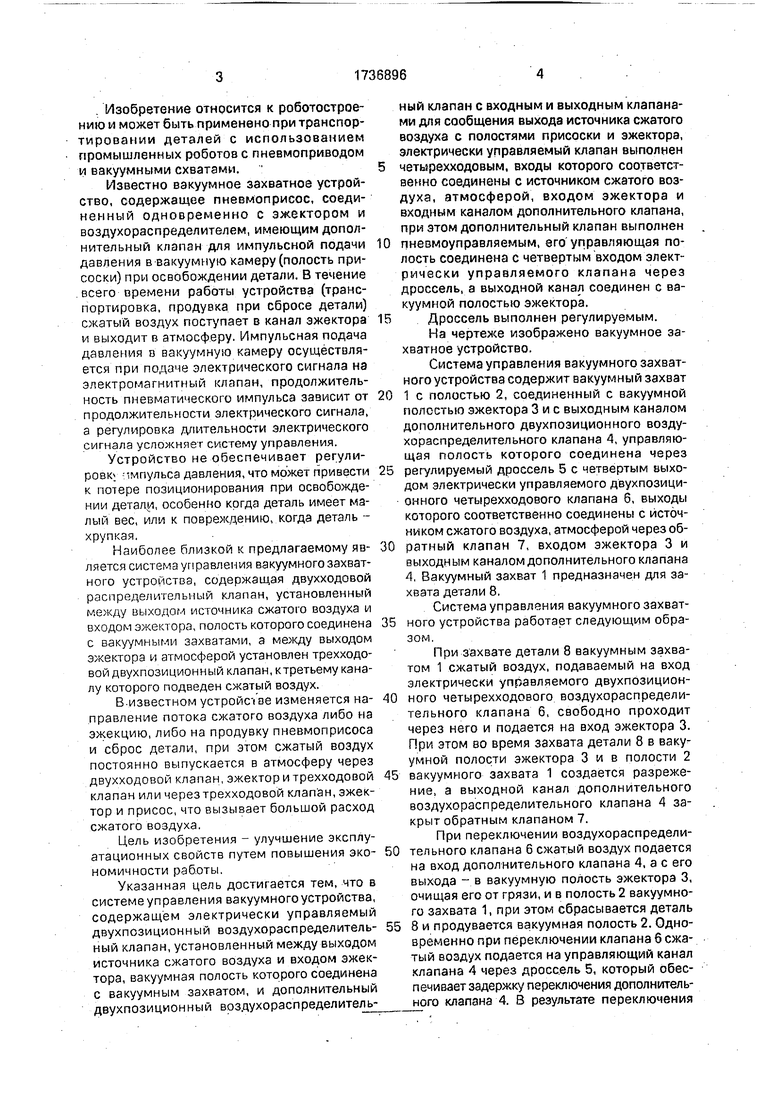
| название | год | авторы | номер документа |
|---|---|---|---|
| Система управления вакуумного захватного устройства | 1982 |
|
SU1122599A1 |
| Вакуумное захватное устройство | 1989 |
|
SU1815217A1 |
| Вакуумный захват | 1988 |
|
SU1705068A1 |
| ОЧУВСТВЛЕННЫЙ ВАКУУМНЫЙ ЗАХВАТ | 2005 |
|
RU2283751C1 |
| Вакуумный захват | 1986 |
|
SU1344598A1 |
| Вакуумное захватное устройство | 1981 |
|
SU1036657A1 |
| Пневматическое устройство для отделения и подачи плоских изделий из стопы | 1987 |
|
SU1546250A1 |
| Вакуумное захватное устройство транспортного средства | 1989 |
|
SU1625812A1 |
| Вакуумное захватное устройство | 1976 |
|
SU624860A1 |
| Захватное устройство | 1988 |
|
SU1549893A1 |
Изобретение относится к роботостроению и может быть применено при транспор- тировднии деталей с использованием промышленных роботов с пневмоприводом и вакуумными схватками. Цель изобретения - улучшение эксплуатационных свойств путем повышения экономичности в работе. Предлагаемая система содержит присоску 1 с полостью 2, соединенную с эжектором 3 и через распределительный канал 4, регулируемый дроссель 5 с воздухораспределителем 6 и обратным клапаном 7, При захвате детали 8 воздух через воздухораспределитель 6 подается к эжектору 3, создающему в полости присоски 1 разрежение, при этом происходит захват .детали 8. 3to время вакуумная магистраль закрыта обратным клапаном 7. При переключении воздухораспределителя 6 воздух поступает к клапану 4 на управляющий канал через регулируемый дроссель 5 и непосредственно через клапан 4 к полости присоски 1, при этом пропускается воздушный импульс давления в момент переключения клапана, обеспечивающего быстрый сброс детали. 1 з.п. ф-лы, 1 ил. ,3
| Система управления вакуумного захватного устройства | 1982 |
|
SU1122599A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
