Изобретение относится к устройствам автоматического регулирования скорости движения транспортных средств, в частности машинно-тракторных агрегатов.
Цель изобретения - повышение эффективности путем оптимизации степени загрузки двигателя.
На чертеже приведена блок-схема предлагаемого устройства.
Устройство для автоматического регулирования скорости движения транспортного средства содержит датчик 1 положения рычага управления, датчик 2 степени загрузки, подключенные через фильтр 3 непосредственно к блоку 4 формирования команд переключения передачи, а также датчик 5 скорости, подключенный к первым входам блоков б, 7 сравнения, вторые входы которых подключены соответственно к блокам 8 и 9 задания минимальной и максимальной скорости. Выходы блоков 6, 7 через последовательно соединенные разделительные диоды 10, 11 и первое исполнительное реле 12, вход которого подключен к выходу датчика 1, с замыкающими контактами 12.1 и 12.2, подключены к исполнительному механизму 13 изменения скоростного режима двигателя 14, расположенного на транспортном средстве 15. Вход второго исполнительного реле 16 подключен к выходу блока 7 через разделительный диод 17, а выход датчика 2 через последовательно соединенные замыкающий контакт 16.1 реле 16 и разделительный диод 17 подключен к одному из входов исполнительного механизма 13. Выход блока 8 подключен к исполнительному механизму включения передачи.
Датчики 1, 2, фильтр 3, блок 4 и исполнительный .механизм 18 образуют контур 19 управления автоматической коробкой передач.
Датчик 5, блоки 6-9, диоды 10, 11, 17, 20, реле 12, 16 и исполнительный механизм 13 образуют контур 21 управления скоростным режимом.
При использовании на транспортном средстве бесступенчатой трансмиссии в контуре 19 будут отсутствовать фильтр 3, блок 4 и исполнительный механизм 18, а при ис- пользавании на транспортном средстве ручного переключения передач контур 19 вместо исполнительного механизма 18 содержит сигнальные лампы, сигнализирующие о необходимости перехода на высшую и низшую передачу.
Устройство работает следующим образом.
При задании по технологическим требованиям диапазона скоростей движения, характеризующегося значениями минимальной и максимальной скорости, существуют оптимальные режимы движения, соответствующие минимальному расходу топлива и максимальной производительности транспортного средства.
0
5
0
5
0
5
0
5
0
5
Регулирование скорости осуществляется в два этапа. Сначала регулируется скорость движения в заданном диапазоне, а затем - значение скорости для достижения оптимального режима движения.
Сигнал на выходе датчика 2 при 100% загрузке двигателя равен нулю, а при недогрузке и перегрузке принимает соответственно отрицательное и положительное значение.
Если транспортное средство двигается со скоростью меньше минимально заданной и при недогрузке двигателя, то на выходе блоков 6, 7 и датчика 2 формируются отрицательные сигналы, для которых диоды 10, 17, 20 открыты, а диод 11 закрыт, тем самым блок 7 отключается от исполнительного механизма 13. Реле 16 замыкает свой контакт 16.1. Контакты 12.1 и 12.2 разомкнуты соответственно при положениях рычага управления, соответствующих максимальному и минимальному скоростным режимам, что предотвращает поступление сигнала и исполнительному механизму 13 на перемещения рычага управления за крайние положения.
Контакты 12.1 и 12.2,реле 12 замкнуты при нахождении рычага управления в любом промежуточном положении.
Выходные сигналы блока 6 и датчика 2, проходя соответственно через диоды 10 и последовательно соединенные контакт 16.1 и диод 20, суммируются и поступают на вход механизма 13 как команда на изменение положения рычага управления в сторону максимального скоростного режима. Скорость транспортного средства возрастает и достигает значения минимально заданной скорости, при этом сигнал на выходе блока 6 изменяет знак и диод 10 разрывает связь блока 6 и механизма 13.
Установка оптимальной скорости внутри заданного диапазона скоростей осуществляется только под действием сигнала датчика 2 до. тех пор, пока его сигнал не станет равным нулю, причем положительный сигнал датчика 2 при перегрузках диод 20 не пропускает на вход механизма 13. Процесс регулирования скорости заканчивается при размыкании контакта 16.1. При начальном значении скорости транспортного средства большем, чем максимальное значение в заданном диапазоне, процесс регулирования происходит аналогично, причем сигнал с выхода блока 7 поступает на вход механизма 13 через диод П и контакты 12.2.
Формула изобретения
Устройство для автоматического регулирования скорости транспортного средства, содержащее датчики положения рычага управления, степени загрузки и скорости, подключенные соответственно к блоку формирования команд переключения передачи и к первым входам блоков
13446364
сравнения, вторые входы которых подключе-вторым исполнительным реле, подключен- ны к блокам задания максимальной и ми-ным к выходу блока задания максималь- нимальной скорости, а выходы через после-ной скорости через один из дополнитель- довательно соединенные разделительныеных диодов, при этом выход датчика степени диоды и замыкающие контакты первого5 загрузки через последовательно соединенные исполнительного реле - к механизму из-замыкающий контакт второго исполнитель- менения скоростного режима двигателя, от-ного реле и другой разделительный диод личающееся тем, что, с целью повышенияподключен к одному из входов исполнитель- точности регулирования, оно снабжено до-ного механизма изменения скоростного ре- полнительными разделительными диодами,жима двигателя.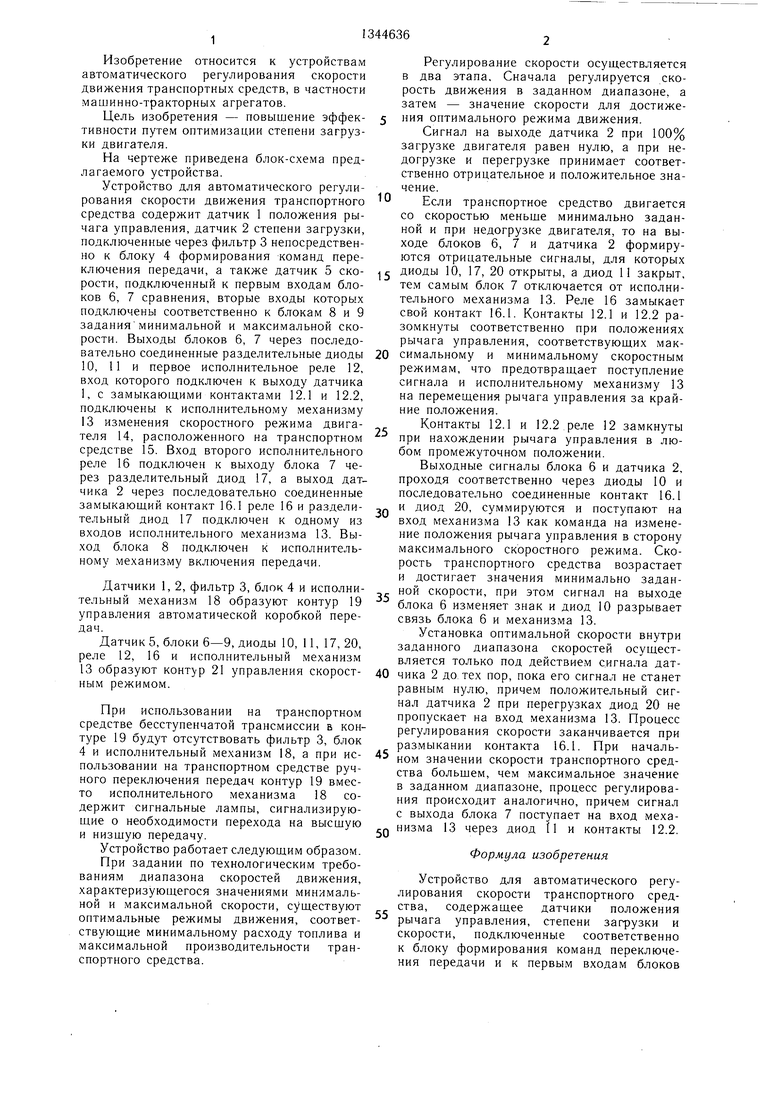
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для автоматического ре-гулиРОВАНия пОСТОяННОй СКОРОСТидВижЕНия ТРАНСпОРТНОгО СРЕдСТВА | 1979 |
|
SU823183A1 |
| Устройство для электропитания транспортного средства | 1984 |
|
SU1238987A1 |
| Устройство для автоматического выбора направления движения объекта | 1980 |
|
SU900551A1 |
| Устройство для управления торможением рельсового транспортного средства | 1985 |
|
SU1337302A1 |
| УСТРОЙСТВО ДЛЯ ЗАРЯДА АККУМУЛЯТОРНОЙ БАТАРЕИ ТРАНСПОРТНОГО СРЕДСТВА | 1993 |
|
RU2069628C1 |
| Устройство для автоматического выбора направления движения объекта | 1988 |
|
SU1613410A2 |
| Электрический ограничитель скорости подъемной машины | 1980 |
|
SU945040A1 |
| Устройство для управления подъемной машиной | 1982 |
|
SU1154194A1 |
| ПРОТИВОУГОННОЕ УСТРОЙСТВО ДЛЯ ТРАНСПОРТНЫХ СРЕДСТВ | 2000 |
|
RU2160196C1 |
| УСТРОЙСТВО ДЛЯ ЭЛЕКТРОСНАБЖЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА | 1994 |
|
RU2090389C1 |
Изобретение относится к устройствам регулирования скорости движения трант спортных средств, в частности машинно- тракторных агрегатов. Цель изобретения - повышение эффективности путем оптимизации степени загрузки двигателя. Устройство содержит датчик 1 положения рычага управления, датчик 2 степени загрузки, подключенные через фильтр 3 непосредственно к блоку 4 формирования команд переключения передачи. Датчик 5 скорости подключен к первым входам блоков 6, 7 сравнения, вторые входы которых подключены соответственно к блокам 8 и 9 задания минимальной и максимальной скорости. Выходы блоков 6, 7 через последовательно соединенные разделительные диоды 10, 11 и замыкаю- ш.ие контакты 12.1, 12.2 первого исполнительного реле 12, вход которого подключен к выходу датчика 1, подключены к исполнительному механизму 13 изменения скоростного режима двигателя 14, расположенного на транспортном средстве 15. Вход второго исполнительного реле 16 подключен к выходу блока 7 через разделительный диод 17, а выход датчика 2 - через последовательно соединенные замыкаюш,ий контакт 16.1 реле 16 и разделительный диод 17. Выход блока 8 подключен к исполнительному механизму включения передачи. Устройство обеспечивает регулировку скорости в два этапа. Сначала регулируется скорость движения в заданном диапазоне по сигналам датчиков 2 и 5, а затем регулирование скорости осуществляется только по сигналам датчика 2. тем самым наряду с выполнением требований по заданному диапазону скоростей выполняются требования по увеличению производительности и экономии топлива. 1 ил. (Л со 4 Nt О5 СО Oi
| Устройство для автоматического ре-гулиРОВАНия пОСТОяННОй СКОРОСТидВижЕНия ТРАНСпОРТНОгО СРЕдСТВА | 1979 |
|
SU823183A1 |
| Способ получения молочной кислоты | 1922 |
|
SU60A1 |
