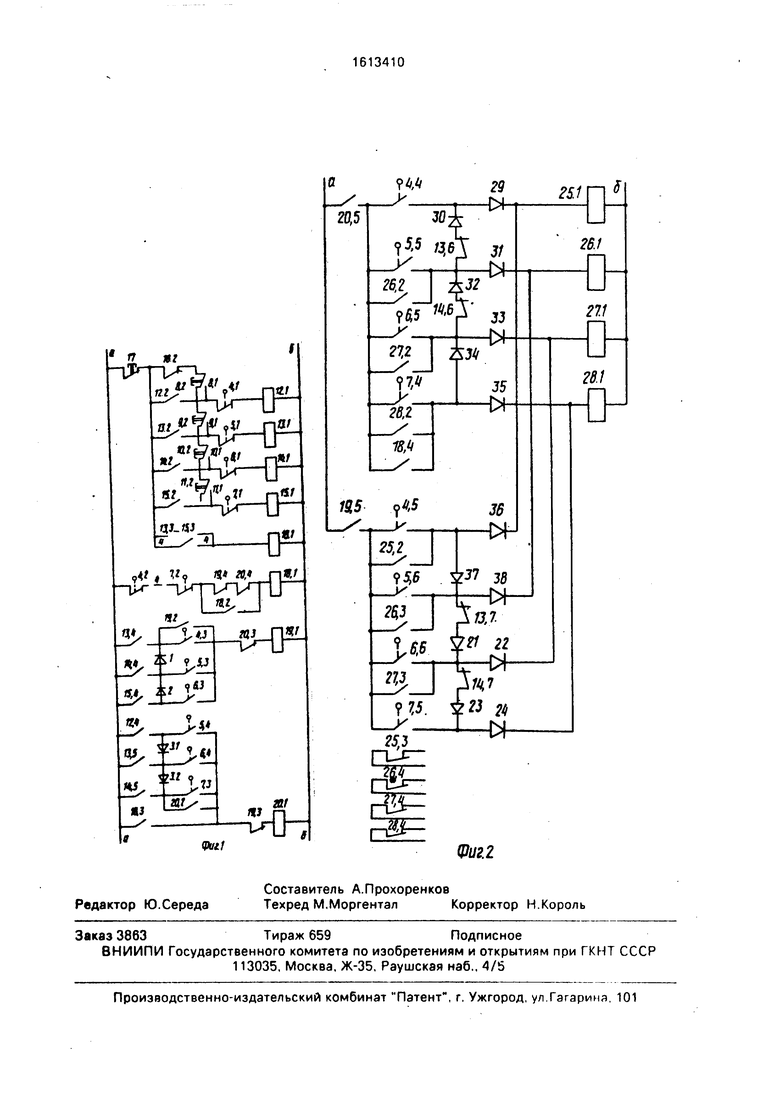
онного останова с обмоткой 18.1 и замыкающими контактами 18.2 и 18,3, пускатель движения вперед с обмоткой 19.1, замыкающим контактом 19.2, размыкающими 19.3 и 19.4изамыкающим 19.5, пускательдвиже- ния назад с обмоткой 20.1, замыкающим контактом 20.2, размыкающими 20.3 и 20.4 и замыкающим 20.5, диоды 21 - 24, реле блокировки с обмотками, замыкающими и размыкающими контактами соответственно 25.1 - 25.3, 26.1 - 26,4, 27.1 - 27.4, 28.1 - 28,3, диоды 20-38, исполнительные механизмы (не показано). В цепи питания обмоток 12.1 -15.1 реле памяти адреса включены размыкающий контакт 17 кнопки отмены адреса, соответствующие замыкающие контакты 12.2 - 15.2, параллельно которым через размыкающий контакт 16.2 и последовательно соединенные размыкающие контакты 8.2 - 11.2 предыдущих кнопок задания адреса подключены замыкающие контакты 8.1 - 11.1 соответствующих кнопок заданию адреса. В цепь питания обмотки 16.1 релезапрета параллельно включены замыкающие контакты 12.3 - 15.3 реле памяти адреса.
В цепь питания обмотки 18.1 реле межпозиционного останова последовательно включены размыкающие контакты 4.2 - 7.2 датчиков положения объекта и 19.4 и 20.4 пускателей. Параллельно двум последним подключен замыкающий контакт 18.2 реле межпозиционного останова. В цепь питания обмоток 19.1 и 20.1 пускателей движения вперед, назад через размыкающие контакты 20.3 и 19.3 соответственно включены последовательно замыкающие контакты 4.3 - 6.3, 5.4, 6.4 и 7.3 датчиков положения, установленных на последующих первой позиции адресования и предыдущей последней соответственно замыкающие контакты 13.4 - 15.4 и 12.4, 13.5 и 14,5 реле памяти адреса, а через диоды 1.2 и 3,1, 3.2 последующих и предыдущих. Параллельно замыкающим контактам 4.3 и 7.3 датчиков положения включены замыкающие контакты 19.2 и 20.2 пускателей движения вперед и назад соответственно. В цепь питания обмотки 20.1 пускателя движения назад включен замыкающий контакт 18.3 реле межпозиционного останова. В цепи питания обмоток 25.1 - 28.1 реле блокировок включены соответственно замыкающие контакты 20,5 и 19.5 пускателей, 4,4 и 4.5, 5,5 и 5.6. 6.5 и 6.6 , 7.4 и 7.5 датчиков положения, параллельно которым подключены замыкающие контакты 25.2, 26.2 - 28.2. 26.3, 27.3, а последовательно диоды 29, 31, 33, 35, 36, 38, 22 и 24. Цепи питания соединены между собой последовательно включенными диодами 30, 32, 34, 37. 2t и 23 и размыкающими контактами 13.6, 14.6, 13.7 и 14.7 реле памяти адреса. В цепи питания исполнительных механизмов включены размыкающие контакты 25.3 - 28.3 реле блокировки.
Устройство работает следующим образом.
Предположим, что объект находится на
0 третьей позиции адресования. Размыкающие контакты 6.1 и 6.2 датчика положения объекта разомкнуты в цепях обмотки 14.2 реле памяти адреса и обмотки 18.1 реле межпозиционного останова, а замыкающие
5 контакты 6.3 - 6.6 датчика замкнуты в цепях обмоток 19.1 и 20.1 пускателей и 27.1 реле блокировки. Задание адреса, например второго, осуществляется нажатием соответствующей кнопки, замыкающий контакт 9.1
0 подает питание на обмотку 13.2. Реле памяти адреса включается, самоблокируется замыкающим контактом 13.1, замыкающим контактом 13.5 через замыкающий контакт 6.4 датчика положения объекта включает пу5 скатель движения назад, а размыкающим контактом 13.6 исключает включение реле 26.1 блокировки позиции, находящейся за заданным пределом адресования. Другой предел ограничивает диод 34.
0 Пускатель назад срабатывает, самоблокируется замыкающим контактом 20.4 для автоматического завершения движения по указанному адресу, замыкающим контактом 20.5 через контакт 6.5 датчика позиции
5 диод 33 включает реле 27.1 блокировки позиции, на которой находится объект, а через тот же контакт 6.5, размыкающий реле 14.6 памяти адреса, диоды 32 и 31 включает реле 26.1 блокировки. Реле 27.1 и 26.1 срабаты0 вают, самоблокируются замыкающими контактами соответственно 27.2 и 26.2 для удержания их во включенном состоянии на протяжении всего движения объект по адресу. Включенные реле 27.1 и 26.1 размыка5 ющими контактами 27.4 и 26.4 каждое запрещает работу вспомогательных объектов при отработке адреса на соответствующих позициях. Объект перемещается в установленном направлении к второй пози0 ции адресования. Включенное замыкающим контактом 13.3 реле запрета размыкающим контактом 16.2 исключает задание другого адреса в процессе движения объекта.
5 Достигнув заданной пбзиции адресования объект взаимодействует с датчиком положения, размыкающий контакт 5.1 которого обесточивает обмотку 13.2 реле памяти адреса, которое отключает пускатель движения назад, контакт 20.5 отключает блокировки реле 26.1 и 27.1. Объект останавливается на заданной позиции. Для отмены адреса нажимается кнопка и размыкающий контакт 17 обесточивает обмотку 12.2 - 15.2 реле памяти адреса.
Если в момент отмены адреса обьект остановился между позициями адресования по цепи 4.2-7.2, 19.1 и 20.1 включается реле межпозиционного останова, которое замыкающими контактами 18.2 становится на самопитание, контактами 18.3 через контакт 19.3 пускателя движения вперед включает обмотку 20.2 пускателя движения назад, а 18 подготавливает цепь включения реле блокировок 25.1-28.1. Объект переме- щается до первой позиции адресования, на которой датчик положения размыкающим контактом 4.3 - 7.3 обесточивает обмотку 20.2 пускателя и тем самым прекращает движение объекта, а контактом 20.5 пуска- теля назад отключаются реле блокировки, снимая запрет на работу других объектов.
Формула изобретения Устройство для автоматического выбо- ра направления движения объекта по авт.св, Nfe 1509316, отличающееся тем, что, с целью расширения области применения за счет исключения столкновений на позициях адресования с взаимодействую- щими объектами, оно снабжено по числу
позиций адресования реле блокировки с замыкающими и размыкающими контактами, исполнительными механизмами и дополнительными диодами, пускатели движения вперед и назад, датчики положения объекта, реле памяти адреса промежуточных позиций и межпозиционного останова, снабжены дополнительными замыкающими и размыкающими контактами, причем дополнительные замыкающие контакты пускателей движения вперед и назад включены последовательно с замыкающими контактами датчиков положения объекта и одного из дополнительных диодов в цепи питания обмоток реле блокировок соответствующих позиций адресования, а с другими дополнительными диодами и дополнительными размыкающими контактами реле памяти адреса промежуточных позиций - в цепи питания обмоток реле блокировки последующих и предыдущих позиций адресования, замыкающие контакты которых подключены параллельно замыкающим контактам датчиков положения объектов одноименных позиций адресования, к последнему из которых подключен и дополнительный замыкающий контакт реле межпозиционного останова, размыкающие контакты реле блокировки включены в цепи питания исполнительных механизмов одноименных позиций адресования.
/S5
IXV
чг.
«t
dS
п2М
te.2
Изобретение относится к промышленному транспорту и может быть использовано для управления перемещением различных объектов с фиксированными позициями останова. Цель изобретения - расширение области применения за счет исключения столкновений на позициях адресования с взаимодействующими объектами. Устройство содержит датчики положения объекта, кнопки задания адреса, реле памяти адреса, реле запрета, кнопку отмены адреса, реле межпозиционного останова, пускатели движения вперед и назад, реле блокировки по числу позиций адресования и диоды. Задание адреса осуществляется соответствующей кнопкой. Срабатывает реле памяти адреса и включает через соответствующий датчик положения объекта пускатель движения вперед или назад, который в свою очередь включает реле блокировки соответствующей адресной позиции, запрещающее работу исполнительного механизма. Реле запрета исключает задание другого адреса. Достигнув заданной позиции адресования, объект взаимодействует с датчиком положения. Обесточивается реле памяти адреса, которое отключает пускатель движения вперед, назад и реле блокировки. Объект останавливается на заданной позиции. 2 ил.
| Устройство для автоматического выбора направления движения объекта | 1988 |
|
SU1509316A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
