Изобретение относится к машиностроению, в частности к тормознгмм устройствам ручных приводов.
Целью изобретения является улучшение эксплуатационных качеств пут обеспечение возможности отключения храпового механизма неработающего привода в двойном приводе тормоза при работе другого привода,,
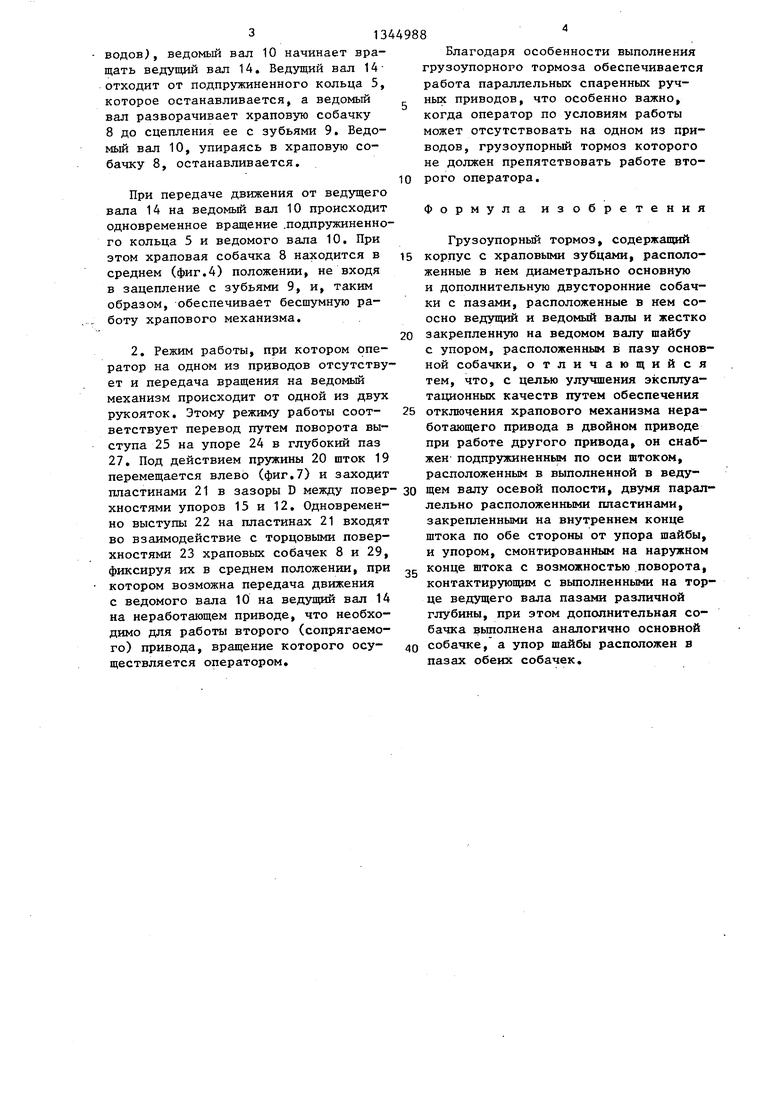
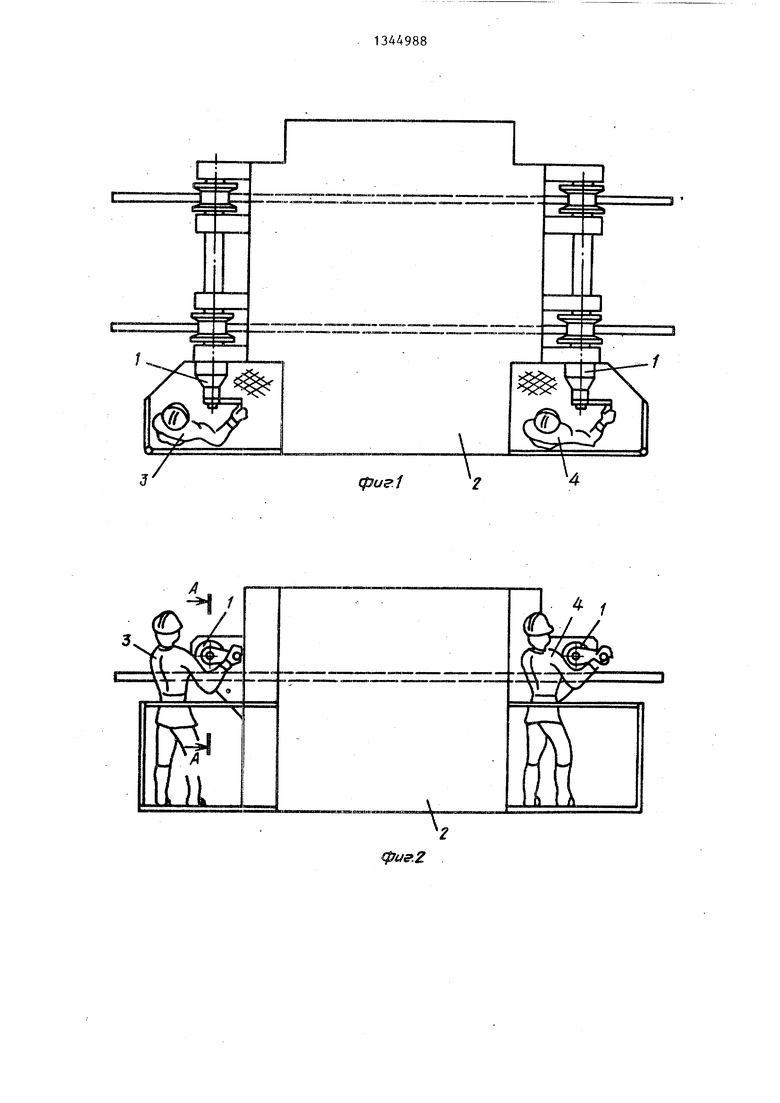
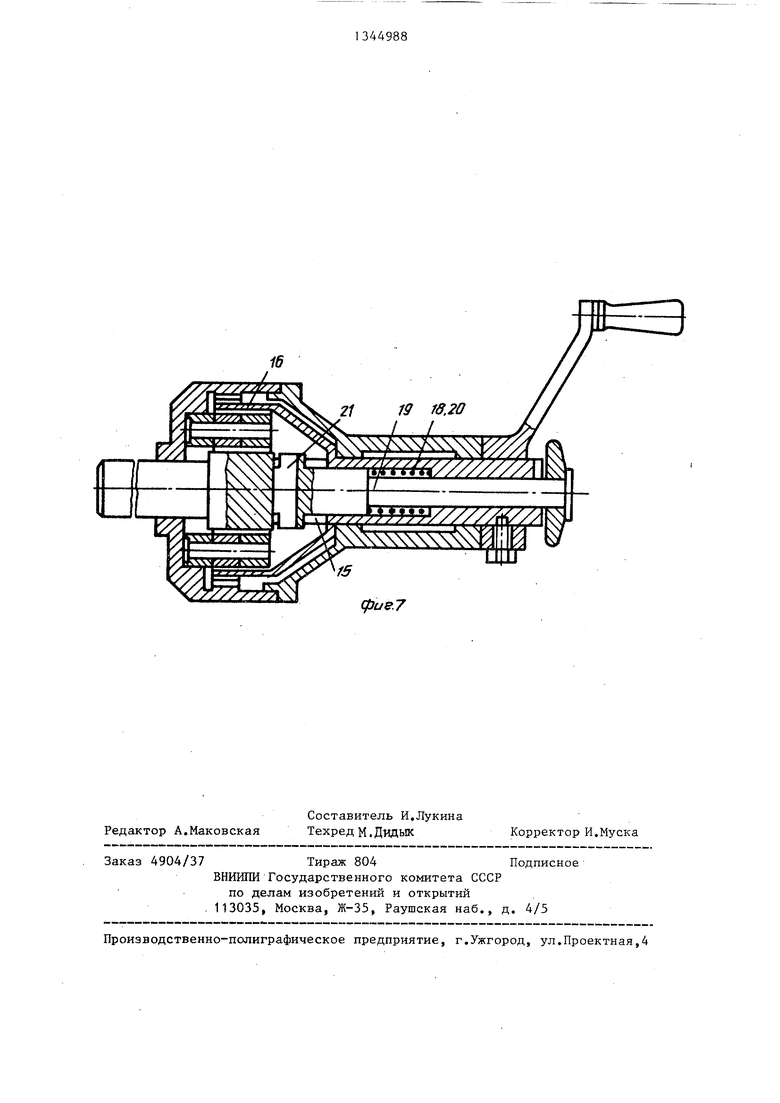
На фиг.1 показана схема спаренн приводов на передвижной тележке, в в плане; на фиг,2 передвижная тележка с приводом, вид сбоку; нафиг разрез А-А на фиг.2- на - рарез . на фиг.З; на - разре В-В ка фигоЗ, на фиг.6 - разрез Гна фиг.З; на фиг.7 - грузоупорный тормоз в положении, соответствующе отключенному состоянию храпового мханизма, продольный разрез,
Грузоупорный тормоз 1 расположе на передвижной тележ се 2 с местами для операторов 3,4 и содержит кольцо 5, состоящее из двух частей, ражимаемых пружинами 6 в неподвижном
корпусе 1, В подпружиненном кольце I
поворотно смонтирована двустороння храповая собачка 8, взаимодействующая в крайних положениях с храповЕл ми зубцами 9 корпуса 7, На ведомом валу 10 жестко закреплена шайба 11 с упором 12, входящим в паз 13 на бачке 8 и вза:имодействующим с его стенками шарнирно.
Ведущий вал 14 снабжен двумя упрами 15 и 16, Упор 15 расположен с
зазором D относительно упора 12 а упор 16 входит в прорези 17 одинакового размера и формы,, выполненные на собачке 8 и кольце 5, Ведущий вал 14 выполнен с осевой полостью 18j в которой установлен шток 19 с пружиной 20, На конце штока 19, сопрягае мом с храповым механизмом, имеются упоры в форме двух параллельных его оси пластин 21 с выступами 22, входящими под воздействием пружины 20 в зазор D между упорами 15 и шайбой 11 соответственно на ведущем 14 и ве домом 10 валах, чем обеспечивается юс стопореиие один относительно другого в среднем положении« Одновремен но выступы 22 на плстинах 21 входят в контакт с торцовой поверхностью 23 храповой собачки 8 и тем самым стопорят ее в среднем положении, при котором между зубцами собачки 8 и зубцами 9 корпуса 7 имеется зазор К,
5
0
5
5
0
На конце штока 19, выведенном наружу, установлен с возможностью поворота относительно оси штока упор 24, имеющий выступ 25, входящий в один из пазов 26 или 27 на торце ведущего вала 14. Пазы 26 и 27 имеют различную глубину, соответствующую двум положениям штока 19о Паз 26 имеет малую глубину,при вхождении в него выступа 25 шток 19 находится в .выведенном из храпового механизма положении (фиг.З). Паз 27 имеет большую, глубину; при вхождении в него выступа 25 шток 19 находится в положении взаимодействия с храповым механизмом (фиг.7), На выведенном конце ведущего вала 14 жестко установлена рукоятка 28, предназначенная для вращения оператором ведущего вала 14, а через него ведомого вала 10 и исполнительного механизма (не показан), Дополнительная двусторонняя собачка 29 выполнена аналогично собачке 8 и расположена в корпусе 7 диаметрально собачке 8,
В спаренных приводах тормоз работает в следующих режимах.
1, В реясиме, когда операторы 3 и 4 вращают рукоятки 28 (фиг.1) на обоих ведущих валах 14 в одном заданном направлении. Этот режим работы соответствует положению штока 19, указанному на фиг.З, Пружина 20 действует на шток 19, смещая его влево. Смещению препятствует упор 24, выступ 25 которого входит в паз 26 малой глубины. Пластины 21 в этом случае не взаимодействуют с сопрягаемыми 0 поверхностями шайбы 11 ведущего 14 и ведомого 10 валов и не препятствуют поворотам храповой собачки 8 относительно собственной оси. При возникновении на ведомых валах 10 момента, совпадающего с направлением вращения ведущих валов 14 (при попутном моменте), ведомый вал 10 обгоняет ведущий вал 14 и разворачивает собачку 8 до сцепления ее с зубьями 9, Ведомый вал 10 останавливается. Для дальнейшего движения в ту же сторону ведущий вал 14 своим упором 16 должен вывести собачку 8 из зацепления с зубьями 9
При возникновении на ведомом ва0
5
5
хгу 10 встречного- момента, направленного противоположно моменту ведущего вала 14 и превосходящего его по величине (с учетом работы двух при31344988
водов), ведомый вал 10 начинает вращать ведущий вал 14. Ведущий вал 14- отходит от подпружиненного кольца 5, которое останавливается, а ведомый вал разворачивает храповую собачку 8 до сцепления ее с зубьями 9. Ведомый вал 10, упираясь в храповую собачку 8, останавливается.
При передаче движения от ведущего вала 14 на ведомый вал 10 происходит одновременное вращение .подпружиненного кольца 5 и ведомого вала 10. При этом храповая собачка 8 находится в среднем (фиг.4) положении, не входя в зацепление с зубьями 9, и, таким образом, обеспечивает бесшумную работу храпового механизма.
2. Режим работы, при котором оператор на одном из приводов отсутствует и передача вращения на ведомьй механизм происходит от одной из двух рукояток. Этому режиму работы соот- ветствует перевод путем поворота выступа 25 на упоре 24 в глубокий паз 27, Под действием пружины 20 шток 19 перемещается влево (фиг,7) и заходит
пластинами 21 в зазоры D между повер- зо щем валу осевой полости, двумя паралхностями упоров 15 и 12, Одновременно выступы 22 на пластинах 21 входят во взаимодействие с торцовыми поверхностями 23 храповых собачек 8 и 29, фиксируя их в среднем положении, при котором возможна передача движения с ведомого вала 10 на ведущий вал 14 на неработающем приводе, что необходимо для работы второго (сопрягаемого) привода, вращение которого осуществляется оператором.
35
40
лельно расположенными пластинами, закрепленными на внутреннем конце штока по обе стороны от упора шайбы, и упором, смонтированным на наружном конце штока с возможностью поворота, контактирующим с выполненными на торце ведущего вала пазами различной глубины, при этом дополнительная собачка выполнена аналогично основной собачке, а упор шайбы расположен в пазах обеих собачек.
Благодаря особенности выполнения грузоупорного тормоза обеспечивается работа параллельных спаренных ручных приводов, что особенно важно, когда оператор по условиям работы может отсутствовать на одном из приводов, грузоупорный тормоз которого не должен препятствовать работе второго оператора.
Формула изобретения
Грузоупорный тормоз f содержащий корпус с храповыми зубцами, расположенные в нем диаметрально основную и дополнительную двусторонние собачки с пазами, расположенные в кем со- осно ведущий и ведомый валы и жестко закрепленную на ведомом валу шайбу с упором, расположенным в пазу основной собачки, отличающийся тем, что, с целью улучшения эксплуатационных качеств путем обеспечения отключения храпового механизма неработающего привода в двойном приводе при работе другого привода он снабжен подпружиненньм по оси штоком, расположенньм в выполненной в веду
лельно расположенными пластинами, закрепленными на внутреннем конце штока по обе стороны от упора шайбы, и упором, смонтированным на наружном конце штока с возможностью поворота, контактирующим с выполненными на торце ведущего вала пазами различной глубины, при этом дополнительная собачка выполнена аналогично основной собачке, а упор шайбы расположен в пазах обеих собачек.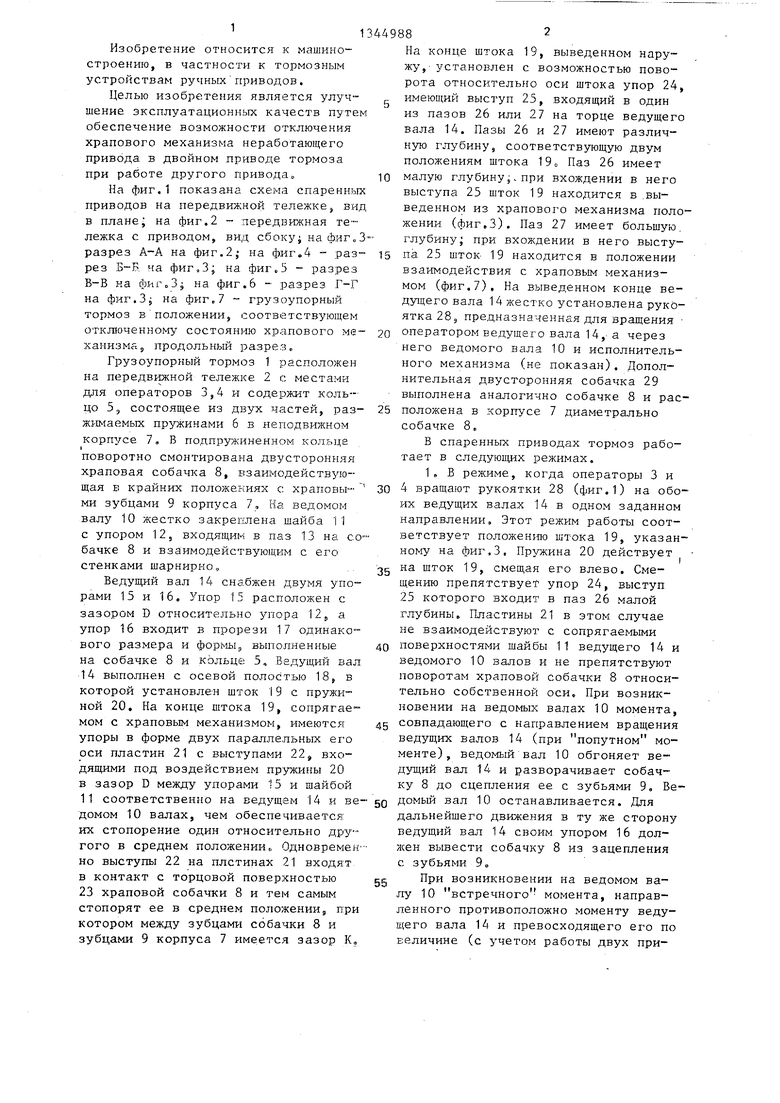
| название | год | авторы | номер документа |
|---|---|---|---|
| Грузоупорный тормоз | 1958 |
|
SU119042A1 |
| Механическая коробка передач (варианты) | 2019 |
|
RU2715829C1 |
| Трансмиссия велосипеда или мотоцикла (варианты) | 2018 |
|
RU2693387C1 |
| Грузоупорный тормоз | 1972 |
|
SU459425A1 |
| Грузоупорный тормоз | 1972 |
|
SU463626A1 |
| МУФТА-ТОРМОЗ | 1987 |
|
RU2032118C1 |
| БЕССТУПЕНЧАТАЯ ПЕРЕДАЧА | 1943 |
|
SU64882A1 |
| Тормозное устройство, затягиваемое под действием груза | 1958 |
|
SU118295A1 |
| ЭЛЕКТРИЧЕСКАЯ ТАЛЬ | 1973 |
|
SU391992A1 |
| Храповой механизм | 1986 |
|
SU1404713A1 |
.Изобретение относится к машиностроению, в частности к тормозньм устройствам ручных приводов. Целью изобретения является улучшение эксплуатационных качеств путем обеспечения возможности отключения храпового механизма неработающего привода в двои6-6 779 12 в 21 ном приводе при работе другого привода, В неподвижном корпусе 7, имею- храповые зубцы 9, расположены двусторонние собачки 8 и 29, шарнир- но связанные с упором 12 шайбы. При отключении тормоза поворачивают упор штока в виде двух параллельных пластин 21. Под действием пружины он перемещается в сторону ведомого вала. Выступы пластин 21 заходят в зазоры между упорами 12 и 15. Взаимодействуя с поверхностями 23 храповых собачек 8 и 29, фиксируют их в среднем положении. В этом положении возможна передача движения с ведомого вала на ведущий вал на неработающем приводе. Это необходимо для работы тормоза от второго привода. 7 ил. сл 16 73 оо NU СО сх оо фиеЛ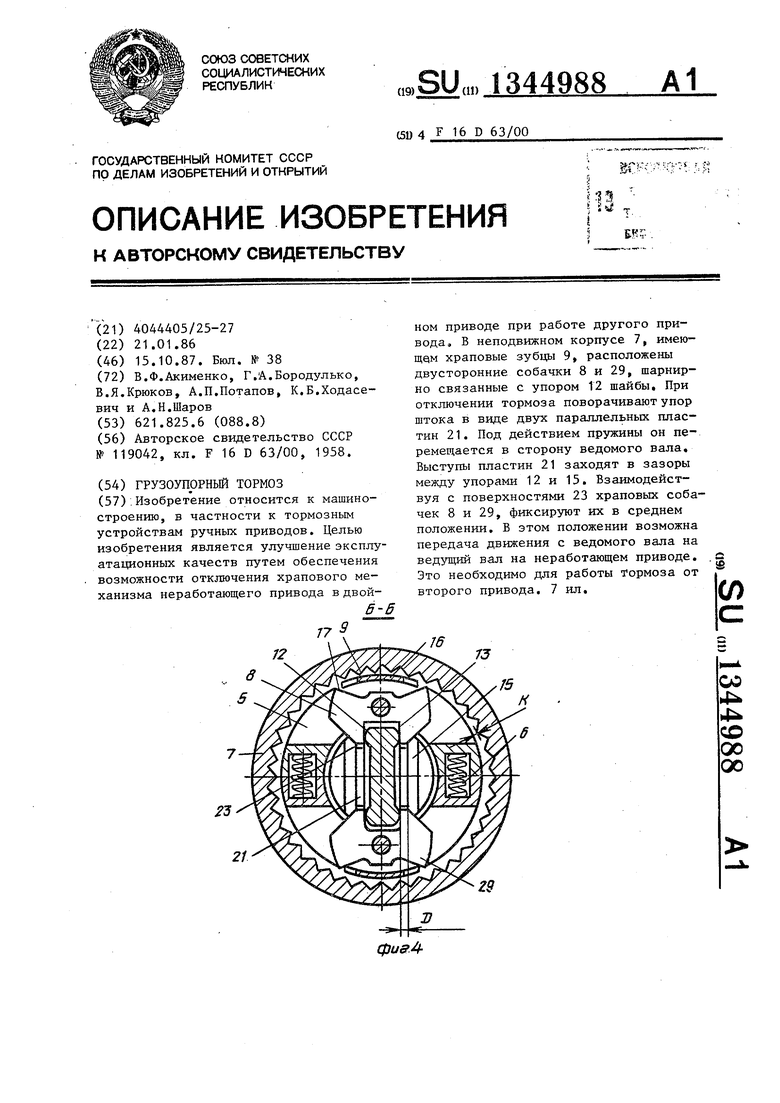
fpuff.Z
21
I
Ш,Ш///7У7 J
М
/5
IT
-rl
фие.З
r
r-r
Cpuf.6
(f)u.5
2f
/5
f
19 18.20
-
.ANNK hj, Г , , / /,Ч : ro ./1. .Г
Ш{Ш////////Л It
7
J
фие.7
Редактор А.Маковская
Составитель И.Лукина Техред М.ДиДЫК
Заказ 4904/37Тираж 804Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий , 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г.Ужгород, ул.Проектная,4
Корректор И.Муска
| Грузоупорный тормоз | 1958 |
|
SU119042A1 |
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
