Известны автоматические устройства компенсации возмущений, включаюш,ие датчик возмущения в виде тахогенератора, связанного с регулируемым двигателем.
Применение безредукторного привода нажимных винтов с электрической системой синхронизации движения их, повыщает надежность работы нажимных устройств прокатных станов, например, типа блюминг.
Для синхронизации обычно предусматривается использование измерительных редукторов, которые с одной стороны сочленяются с нажимными винтами, а с другой - с элементами системы синхронизации: тахогенераторами, сельсинами и т. д., воздействующими на систему управления приводными электродвигателями каждого винта.
Повышение качества работы системы синхронизации достигается устранением механических люфтов в элементах указанных редукторов и их связях с нажимными винтами устанавливают электродвигатель, например, постоянного тока, сочлененный с одним из валов измерительного редуктора и создающего принудительный натяг в зубьях передачи редуктора и в элементах его связи с нажимным винтом.
ленным по отношению к моменту двигателя нажимного винта.
При работе указанного двигателя необходимо обеспечить постоянство его статического момента или постоянство величины нажатия в зубьях щестерен кинематического редуктора и его связях с нажимным винтом.
В противном случае увеличивается износ зубьев и ухудшается работа системы синхронизации.
Указанное мероприятие в тем большей степени необходимо, когда часть элементов измерительных редукторов выполняется с разрезными шестернями с компенсирующими пружинами, также создающими дополнительный натяг в зубьях и частично выбирающих люфты.
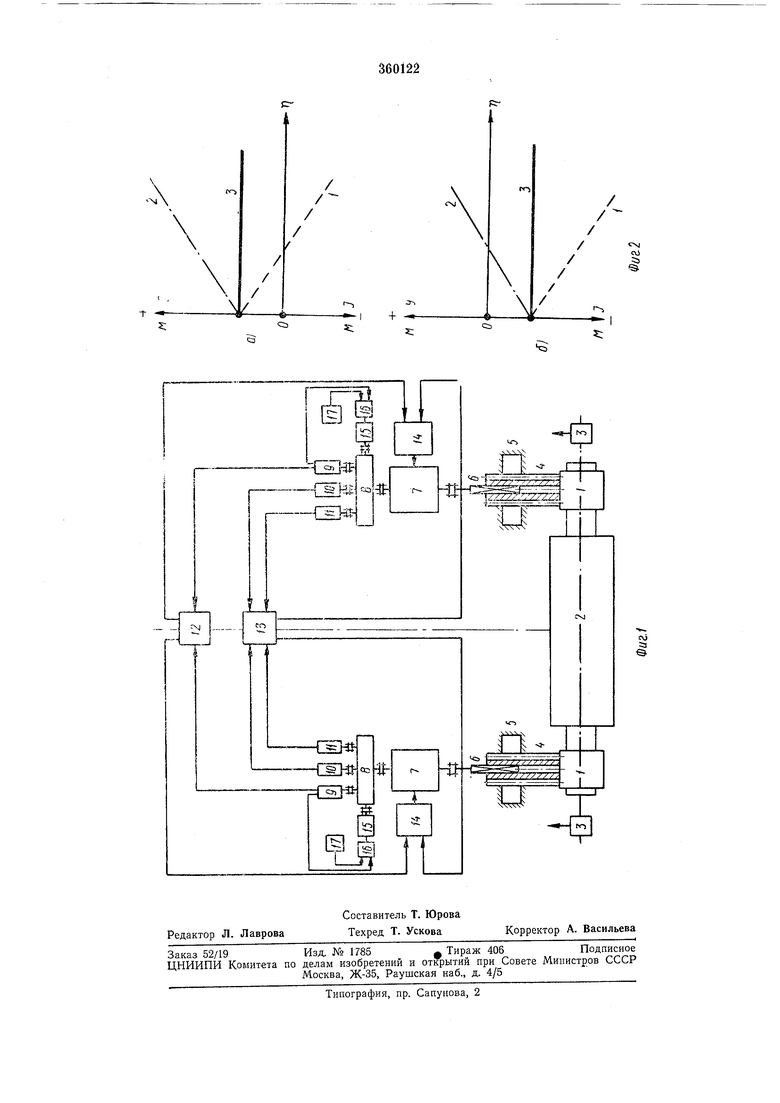
В этом случае, благодаря наличию указанных упругих связей (пружин), непостоянство статического момента двигателя выборки люфтов и соответствующих усилий в зубьях шестерен кинематического редуктора существенно ухудщают работу системы синхронизации. 3 тическому току нагрузки, и выделения этого тока из суммарного тока двигателя. Следовательно, при относительно просто реализуемой системе контроля постоянства динамического тока двигателя, величина его5 статического тока, зависящего от скорости приводного двигателя нажимного винта, известными методами не может быть поддержана с необходимой точностью. Кроме того, при работе регулятора тока,10 поддерживающего постоянство суммарного значения тока, динамический ток двигателя будет изменяться, что также связано с изменением статического тока двигателя выборки люфтов при изменении скорости вращения15 приводных двигателей нажимных виитов. Предлагаемое устройство обеспечивает автоматическое управление выборкой люфтов в измерительных редукторах нажимных винтов прокатного стана и постоянство статического20 момента в двигателе выборки люфтов. Это достигается тем, что устройство содержит контур .регулирования по возмущению, где датчиком возмущения является тахогенератор, сочлененный через измерительный ре-25 .дуктор с нажимными винтами, а выход его подключен к двигателю выборки мехаиических люфтов. На фиг. 1 изображена схема предлагаемого устройства; на фиг. 2, а и б - зависимости30 момента и тока двигателя выборки люфтов от скорости вращения приводных двигателей. Устройство работает следующим образом. Подушки 1 прокатного валка 2 с помощью устройства переуравновешивапия 3 прижима-35 ются к торцам стаканов 4, имеющих внутри шлицевой вырез, и снаружи винтовую нарезку для вращения в неподвижных гайках 5. Для вращения указанных стаканов, являющихся нажимными винтами, используют приз-40 магические щлицевые валы 6, скользящие по внутренним шлицевым плоскостям стаканов и приводимые электродвигателями 7. Вторые концы валов приводных электро-двигателей 7 сочленены с измерительными45 (кинематическими) редукторами 8, с выходными концами валов которых механически связаны тахогенераторы 9 и сельсины 10 и 11, соответственно грубого « точного отчетов. С помощью каналов 12 и 13 соответственно50 скоростной и путевой синхронизации в систему регулирования 14 приводных двигателей 7 нажимных винтов подаются синхронизирующие сигналы, устраняющие рассогласование скоростей вращения этих двигателей, т. к. от-55. клонение взаимного положения нажимных винтов. Для выборки механических люфтов в кинематических редукторах и их связях с нажимньши винтами используют моментные60 электродвигатели 15 (двигатели выборки ме4ки питания 16, содержащие по два канала управления. Одни из каналов предназначен для ввода независимого сигнала 17, определяющего напряжение покоя U двигателя выборки люфтов 15 и соответствующее этому напряжению величину статических значений тока / и момента М, обуславливающих необходимое нажатие в зубьях кинематических редукторов 8 и их связях с нажимными винтами, По второму каналу в регулируемый источник питания 16 двигателей выборки люфтов 15 от тахогенераторов 9 поступают сигналы, пропорциональные скорости вращения приводных двигателей 7 нажимных винтов 4 и определяющие необходимую, зависящую от скорости, величину добавочного напряжения , предназначенную для комненсации переменной ЭДС Е двигателей выборки люфтов, Статический момент М двигателей выборки люфтов при постоянной величине напряжения на его якоре онределяют скоростью вращения приводного двигателя соответствующего нажимного винта, поскольку номинальный момент последнего в 30-50 и более раз больше номинального момента двигателя выборки люфтов, При этом, если статический момент двигателя выборки люфтов, задаваемый в режиме покоя для обеспечения натяга в элементах кинематики во всех режимах, совпадает по направлению с электромагнитным моментом приводного двигателя нажимного винта, то. например, при увеличении скорости п нажимного виита (от состояния покоя) статический момент М и ток / двигателя выборки люфтов сперва уменьшается до нуля, а затем увеличивается в противоположную сторону, пропорционально увеличению скорости указанного приводного двигателя (см. прямую 1 на фиг. 2,а). В этом случае двигатель выборки люфтов после перехода тока через нулевое значение будет работать в генераторном режиме, Если же электромагнитный момент двигателя выборки люфтов при покое противоположен электромагнитному моменту приводного двигателя нажимного винта, то при увеличении скорости п нажимного винта статический момент М и ток / двигателя выборки люфтов будет увеличиваться пропорционально скорости приводного двигателя (см. прямую 1 на фиг. 2, б). В этом случае двигатель выборки люфтов работает в противоточном режиме, начиная от состояния покоя, В обоих рассмотренных случаях статический момент двигателя выборки люфтов при покое будет пропорционален приложенному напряжению И. Ток / статической нагрузки при покое раДля поддержания постоянства величины статического момента М двигателя выборки люфтов, в случае соответствия направлений его момента и момента двигателя нажимного винта, необходимо компенсировать . ЭДС Е двигателя выборки люфтов встречно направленной величиной добавочного напряжения At/. В этом режиме ЭДС Е двигателя выборки люфтов отрицательна; поэтому добавочное напряжение At/, компенсирующее изменение ЭДС Е должно быть положительным (см. прямую 2 на фиг. 2, а) и меняться в функции скорости по такому же закону как и ЭДС Е двигателя вьгборки люфтов, т. е. должно зависеть от скорости приводного двигателя нажимного винта. Тогда ток / двигателя выборки люфтов будет равен: и - Е Ш и RR (при At/ -) Следовательно, при одинаковых законах изменения ЭДС Е двигателя выборки люфтов и добавочного напряжения At/ на его зажимах величины тока / и момента М. этого двигателя остаются постоянными (см. прямую 3 на фиг. 2,а), независимо от скорости п. Если электромагнитный момент уИ двигателя выборки люфтов противонаправлен моменту двигателя нажимного винта, то для обеспечения постоянства величины М добаночное напряжение At/ должно быть отрицательным, и также меняться в функции скорости по такому же закону, что и ЭДС Е двигателя, и должно быть противонаправленным этой ЭДС. Действительно, поскольку в этом случае двигатель выборки люфтов работает в противоточном режиме, то ЭДС Е его положительная (см. прямую 1 на фиг. 2, б). Тогда для компенсации этой ЭДС добавочное напряжение Af/ должно быть отрицательным и меняться по прямой 2 (см. фиг. 2, б). При этом ток двигателя / будет равен: и + Е - Ш и.,„, R Т (при -At/-Е) т. е. будет изображаться прямой 3 (на фиг. 2, б). в обоих рассмотренных случаях, иллюстрированных рисунками, для сохранения постоянства статического тока / и момента М двигателя выборки люфтов, необходимо, кроме напряжения t/, действующего на зажимах этого двигателя при покое, подавать в систему управления этого двигателя добавочное напряжение соответствующего знака, функционально зависящее от скорости вращения нажимного винта и компенсирующее ЭДС двигателя выборки люфтов, что и осуществлено в данном предложении. Предмет изобретения Устройство для автоматической компенсации возмущений при выборке механи-ieских люфтов в измерительном редукторе нажимного винта прокатного стана, включающее датчик возмущения в виде тахсгенератора, соединенный с регулируемым двигателем, отличающееся тем, что, с целью достижения постоянства статического момента в двигателе выборки механических люфтов, тахогенератор сочленен через измерительный редуктор с нажимными винтами, а выход его подключен к двигателю выборки механических люфтов. т -«- г;
tNI
CVJ -I +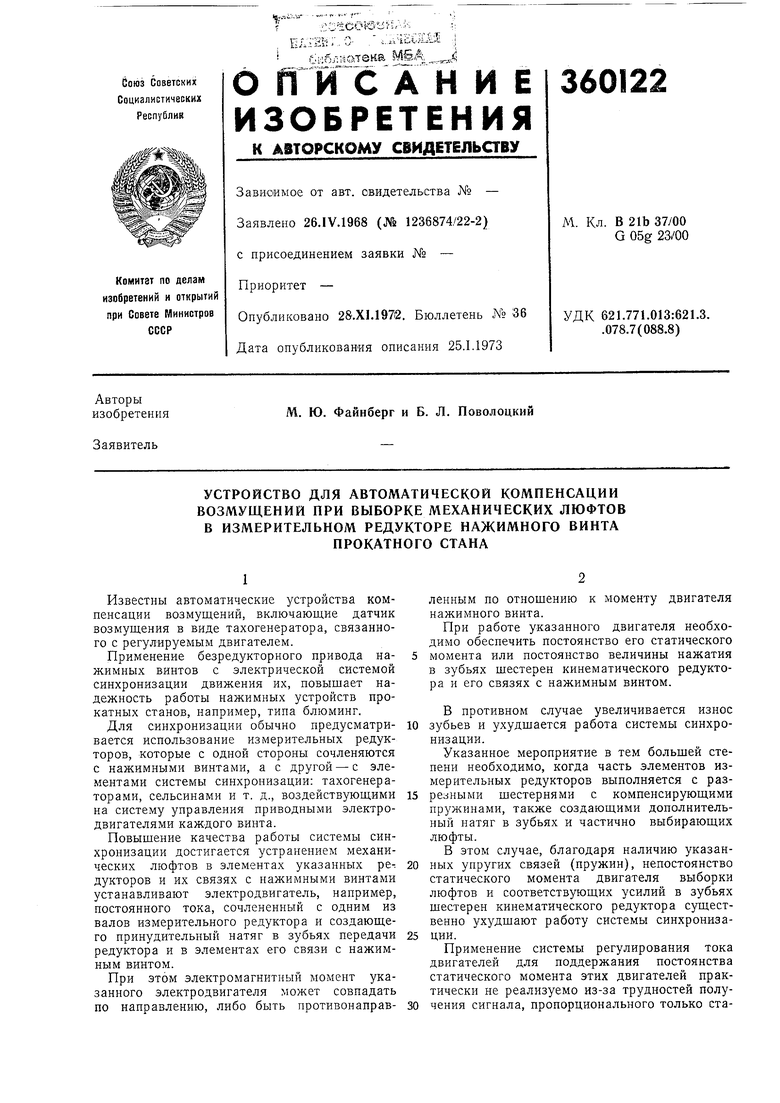
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для автоматической компенсации возмущений при выборке механических люфтов в измерительном редукторе нажимного винта прокатного стана | 1976 |
|
SU575149A1 |
| Система автоматического управления телескопом | 1980 |
|
SU974334A1 |
| Цифро-аналоговая система управления положением механизмов | 1981 |
|
SU1005968A1 |
| Устройство для измерения скорости входа металла в клеть при прокатке | 1972 |
|
SU438460A1 |
| Устройство для управления нажимнымиВиНТАМи | 1979 |
|
SU829235A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ НАЖИМНЫЛ^И ВИНТАМИ РЕВЕРСИВНОГО ОБЖИМНОГО СТАНА | 1972 |
|
SU425684A1 |
| Электропривод нажимного устройства прокатного стана | 1977 |
|
SU671891A1 |
| Квазиоптимальная система автоматического регулирования натяжения полосы на прокатном стане | 1976 |
|
SU578134A1 |
| Устройство для синхронизации нажимных винтов клети прокатного стана | 1968 |
|
SU600679A1 |
| РЕДУКТОР УПРАВЛЕНИЯ АНТЕННОЙ СИСТЕМОЙ | 2000 |
|
RU2194893C2 |