10
15
20
11346560
Изобретение относится к подъемно- трос 14 транспортному оборудованию и может гаются, быть использовано, например, на пред- 6 и приятиях по ремонту сложнобытовой тех техники, в частности стиральных машин, холодильников и т.п.
Цель изобретения - повьпиение надежности захвата.
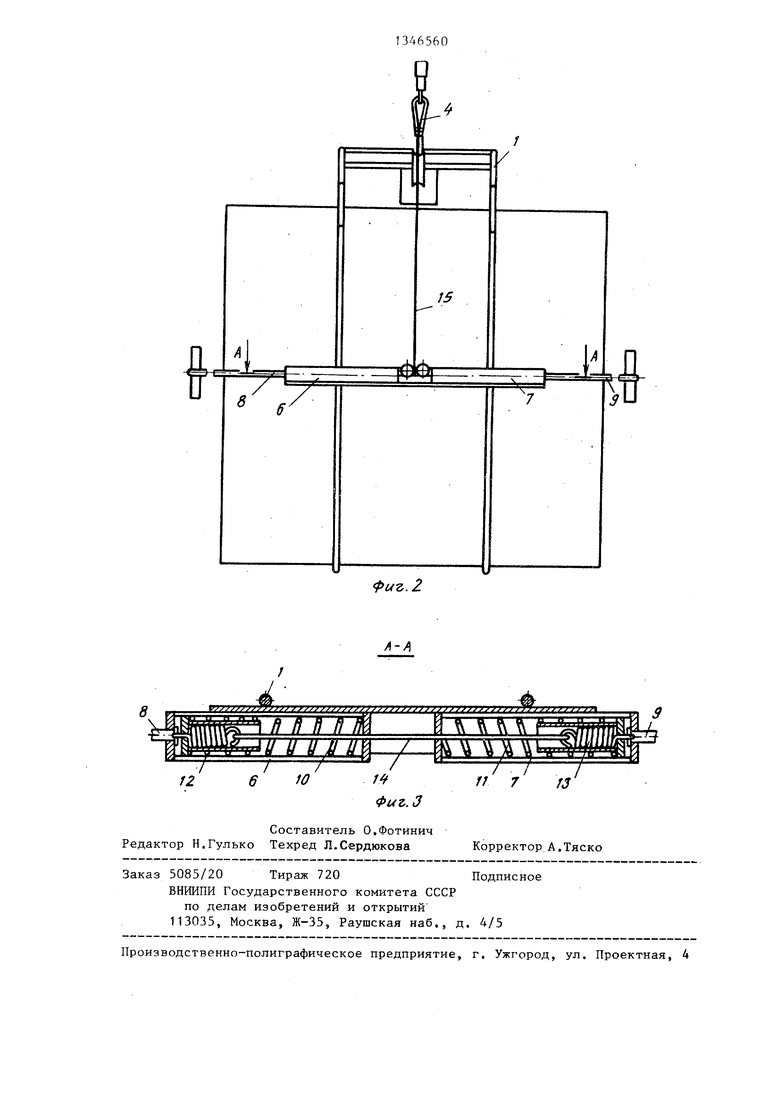
На фиг. 1 изображено устройство для захвата штучных гр|узов, вид сбоку J на фиг. 2 - то же, вид сзади; на фиг. 3 - сечение А-А на фиг. 2.
Устройство для захвата штучных грузов содержит Г-образную траверсу 1 с вилочными подхватами,2, прижимное приспособление, состоящее из шарнирно закрепленного в верхней части траверсы 1 двуплечего рычага 3. На одном плече рычага 3 располо-. жена петля 4 для навешивания на крюк грузоподъемного механизма, а на другом плече - упор 5. На тыльной стороне устройства расположены направляю- щие 6 и 7, в которых установлены изогнутые лапы 8 и 9, пружины 10 и 11. Лапы 8 и 9 связаны друг с другом посредством пружин 12 и 13 и троса 14. Первое плечо рычага 3 соединено посредством троса 15 с тросом 14, Кроме того, устройство имеет рукоятки 16.
Устройство для захвата штучных грузов работает следующим образом.
Устройство навешивают петлей 4 35 на крюк грузоподъемного механизма. В положении без груза двуплечий рычаг 3 удерживается в раскрытом состоянии тросом 15. Боковые рычаги 8 и 9 благодаря пружинам 10 и 11 макси- мально раздвинуты, С помощью рукояток 16 заводят пойхваты 2 под груз. При подъеме под воздействием веса груза навешиваемое на крюк плечо рычага 3 стремится занять вертикальное положение, tipH этом другое плечо упором 5 фиксирует груз. Одновременно с перемещением рычага 3 его первое плечо посредством троса 15 тянет
7 и пор
25
30
вые пов таким о чае, ко стигли продолж грузу, ные, че рычагу упор 5
Осво осущест При уст то -его ройство лапы 8 груз, и 12 и 13 чаг 3. устройс
Форм
Устр грузов, версу с плечий тикальн закрепл ней, од петлей подъемн с я те дежност ляющими на верт версы, щих и п них изо за, тро рых чер динены щих кон один ко первым с первы
14 ся,
. При этом рычаги 8 и 9 сдви- перемещаясь в направляющих 7 и сжимая пружины 10 и 11 до пор, пока они не упрутся в боко0
5
0
трос 14 гаются, 6 и тех
5
5
0
вые поверхности груза, фиксируя его таким образом более надежно. В случае, когда боковые рычаги 8 и 9 достигли поверхности груза, .а упор 5 продолжает еще двигаться навстречу грузу, то пружины 12 и 13 более силы ные, чем пружины 10 и 11, -позволяют рычагу 3 двигаться до тех пор, пока упор 5 не достигнет поверхности груза.
Освобождение устройства от груза осуществляется в следующем порядке. При установке груза в требуемое место -его вес больше не влияет на устройство. Пружины 10 и 11 раздвигают лапы 8 и 9, которые освобозсдают груз, и одновременно через пружины 12 и 13 тросы 14 и 15 раскрывают рычаг 3. С помощью рукояток 16 отводят устройство от груза.
Формула изобретения
Устройство для захвата штучных грузов, содержащее Г-образную траверсу с вилочными подхватами и двуплечий рычаг для прижатия груза к вертикальной части траверсы шарнирно закрепленный в верхней части последней, одно плечо которого выполнено с петлей для навешивания на крюк грузоподъемной машины, отличающее- с я тем, что, с целью повьшгения надежности, оно снабжено полыми направляющими, горизонта льно закрепленными на вертикальной части Г-образной траверсы, установленными в направляющих и подпружиненными относительно них изогнутыми лапами для охвата груза, тросами, концы одного из которых через дополцительные пружины соединены с расположенными в .направляющих концами упомянутых лап ., при этом один конец второго троса соединен с первым в его средней частиj а другой - с первым плечом двуплечего рычага.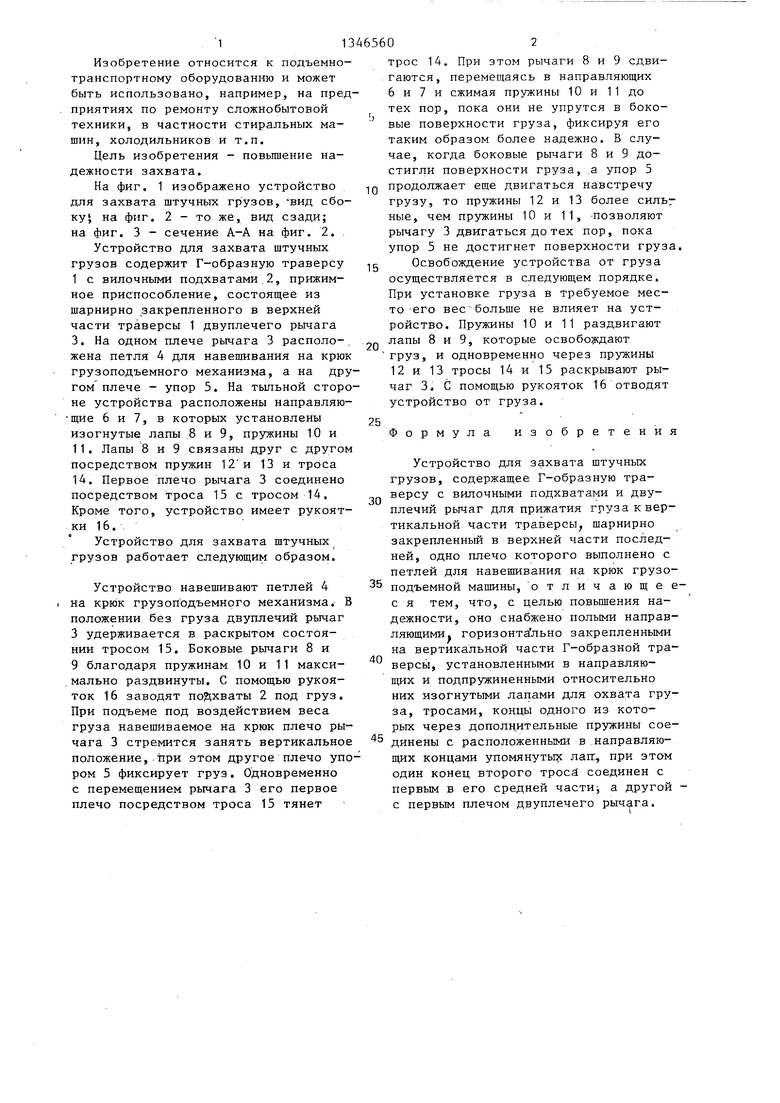
| название | год | авторы | номер документа |
|---|---|---|---|
| Вилочный захват для штучныхгРузОВ | 1978 |
|
SU804565A1 |
| Вилочный захват для штучных грузов | 1978 |
|
SU835925A1 |
| Захватное устройство | 1987 |
|
SU1493582A1 |
| Захватное устройство для штучных грузов | 1981 |
|
SU1065325A1 |
| Захватное устройство для штучных грузов | 1989 |
|
SU1765096A1 |
| Захватное устройство для ящиков | 1972 |
|
SU464516A1 |
| Захватное устройство для ступенчатых цилиндрических грузов | 1990 |
|
SU1766823A1 |
| ВИЛОЧНЫЙ ЗАХВАТ ДЛЯ ПАКЕТИРОВАННЫХ ГРУЗОВ | 1969 |
|
SU233858A1 |
| Грузозахватное устройство | 1990 |
|
SU1770252A1 |
| Автоматический захват | 1981 |
|
SU1020350A1 |
Изобретение относится к подъемно-транспортному оборудованию. Цель изобретения - повьшение надежности захвата. Устройство содержит Г-образ- ную траверсу 1, на которой размещены вилочные подхваты 2, двуплечий рычаг 3 для прижима груза и прижимные подпружиненные лапы 8, соединенные тросами с одним из плеч двуплече го рычага 3. При подъеме под действием веса груза плечо рычага 3, соединенное с крюком, тянет за собой трос 15, что приводит к перемещению прижимных лап. 3 ил. (Л со 4 05 СП О) ФиЪ.1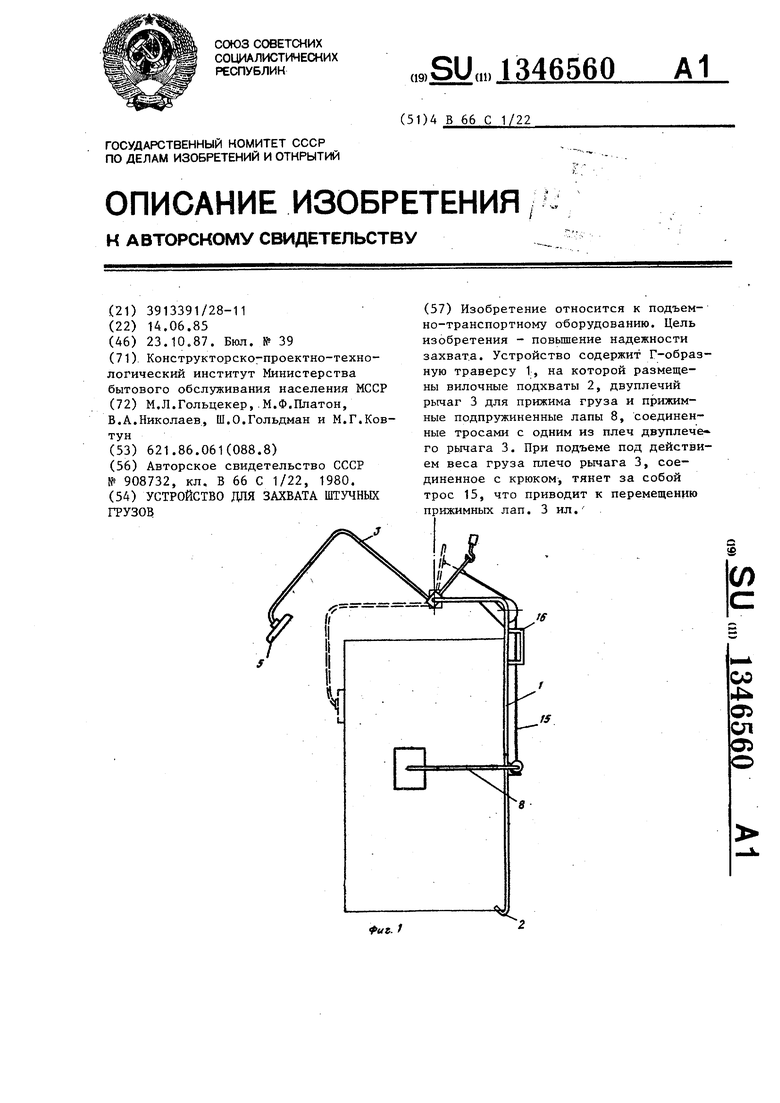
У31ШР
Ш1
1
(.2
/2
лг
Составитель О.Фотинич Редактор Н.Гулько Техред Л.Сердюкова
Заказ 5085/20 Тираж 720Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб,, д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
Корректор А.Тяско
| Захватное устройство для ящиков | 1980 |
|
SU908732A1 |
