Изобретение относится к виброзашите механизмов, в частности к виброизолирующим устройствам.
Цель изобретения - повышение быстродействия устройства.
На чертеже изображено виброизолирующее устройство, общий вид.
Виброизолирующее устройство содержит щток 1, поддерживающий виброизолируе- мый объект 2 и опирающийся на несунхий упругий элемент 3, установленный между штоком 1 и вибрирующим объектом 4. Шкивы 5 и 6 вращаются соответственно на осях 7 и 8, закрепленных на штоке 2. Шкивы 5 и 6 соединенные между собой ремнем 9, могут приводиться во вращение электродвигателем 10 посредством червяка 11 и червячного колеса 12. Шкив 5 жестко связан с червячным колесом 12. Если электродвигатель 10 не вращается, то шкивы 5 и б не могут вращаться за счет самоторможения червячной передачи. Пружины 13 и 14 компенсаторов жесткости одними концами заделаны в объект 4, а свободными концами опираются через шатуны 15 и 16 на ползуны 17 и 18, связанные с ремнем 9 силами трения.
Жесткость первого компенсатора, состоящего из пружины 13, шатуна 15 и ползуна 17, равна жесткости второго компенсатора, состоящего из пружины 14, шатуна 16 и ползуна 18. Суммарная жесткость компенсаторов равна по модулю и противоположна по знаку упругого элемента 3, поэтому общая жесткость виброизолирующего механизма равняется нулю.
Ползуны 17 и 18 находятся друг против друга на одной горизонтали, их толщина а по вертикали одинакова. Расстояние в по вертикали между ограничителями 19 и 20, жестко закрепленными на вибрирующем объекте 4, равно в 2А + а, где А - амплитуда колебаний вибрирующего объекта. Наибольшее расстояние между ползунами и соответствующими им ограничителями равно 2А.
Наклоны патунов 15 и 16 выбраны таким образом, что когда ползун 17 находится у ограничителя 19, то шатун 15 занимает горизонтальное положение, а когда ползун 18 находится у ограничителя 20, то шатун 16 занимает горизонтальное положение.
Причем в те моменты, когда щатуны 15 и 16 поочередно находятся в горизонтальном положении, они находящимися у них на концах роликами 21 и 22 упираются в рейку 23 и несколько отжимают ползуны 17 и 18 от ремня 9, так, что сила трения между ползунами и ремнем в этих положениях становится близкой нулю.
Контакты 24 и 25 следящей системы закреплены соответственно на ползунах 17 и 18. Эти контакты замыкаются, если ползуны 17 и 18 не находятся на одной горизонтали, и тем самым включают электродвигатель 10, который вращая щкив 5 по часовой стрелке.
перемещает ползуны 17 и 18 компенсаторов жесткости в противоположные стороны. Так как силовые характеристики компенсаторов жесткости линейны и одинаковы, то при таком взаимном пере.мещении ползунов 17 и 18, общее усилие, создаваемое компенсаторами, остается таким же, как и до перемещения ползунов электродвигателем.
Виброизолирующий механизм работает следующим образом.
При постоянной нагрузке Р, действующей на объект 2, виброизоляция обеспечивается нулевой жесткостью виброизолирующего механизма.
При изменении нагрузки Р, например ее
увеличении, объект 2 со щтоко.м 1 проседает вниз, ползун 17 первого компенсатора жесткости упирается в ограничитель 19 и проскальзывает на некоторое расстояние относительно ремня 9. При этом дополнительное усилие на объект возникает только за счет
0 увеличения упругого элемента 3. Динамических усилий от выключения из работы первого компенсатора не возникает, так как этот компенсатор выключается в том положении, в котором вертикальная составляющая его
5 усилия равна нулю (щатун 15 занимает горизонтальное положение). Не возникает динамических усилий и от проскальзывания ползуна 17 относительно ремня 9 из-за того, что в момент проскальзывания сила трения между ползуном и ремнем уменьшена пракQ тически до нуля. Ползун 18 второго компенсатора С15язан силой трения с ремнем 9 и в.мес- те с ним опускается ниже ползуна 17.
Если бы в этом виброизолирующе.м механизме отсутствовал электродвигатель 10, восстанавливающий исходное положение
5 ползунов относительно жестких ограничителей 19 и 20, то с каждым изменением нагрузки Р все больше и больше увеличивалось бы статическое смещение между вибро- изолируемы.м и виброизолирующим объектами.
0 Совершенно иначе ведет себя виброизолирующий механизм с электродвигателем. Как только ползун 18 оказывается ниже ползуна 17, контакты 24 и 25 замыкаются, электродвигатель 10 включается и, вращая шкив
г 5 по часовой стрелке, возвращает ползуны 17 и 18 на одну горизонталь. В результате этого ползуны 17 и 18 возвращаются в прежнее положение относительно ограничителей 19 и 20.
Перестройка виброизолирующего устрой0 етва при увеличении нагрузки Р происходит в те моменты, когда ползун 17 первого компенсатора упирается в жесткий ограничитель 19 и проскальзывает относительно ремня 9. При уменьшении нагрузки Р виброизолирующее устройство объект приподни5 мается, ползун 18 второго компенсатора упирается в ограничитель 20 и проскальзывает относительно ремня 9. Электродвигатель выполняет вспомогательную роль - возвращает ползуны 17 и 18 в исходные положения относительно ограничителей 19 и 20.
Кроме того, электродвигатель при любом изменении нагрузки Р (как при ее увеличении, так и при ее уменьшении) вращает шкив 5 только в одну сторону - по часовой стрелке.
Формула изобретения
1. Виброизолируюшее устройство, содержащее упругий элемент, установленный между вибрирующим объектом и виброизоли- руемым объектом, компенсаторы жесткости, расположенные параллельно упругому элементу и выполненные в виде пружин, одними концами связанных с вибрирующим объектом, и следящую систему, установленную последовательно компенсаторам жесткости, отличающееся тем, что, с целью повышения быстродействия, следящая система выполнена состоящей из щтока, на котором установлена пара шкивов, охваченных бесконечным ремнем, опирающимся внутренней поверхностью на щток, а внешней поверхностью взаимодействующим фрикцпон- но со связанными через шатуны с другими концами указанных пружин ползунами для
взаимодействия с упора.ми, смещенными относительно друг друга вдоль оси штока, при этом один из шкивов связан с приводом, контакты включения которого связаны с ползунами.
2. Устройство по п. 1, отличающееся тем, что шатуны снабжены роликами, взаимодействующими с опорной рейкой, связанной с штоком.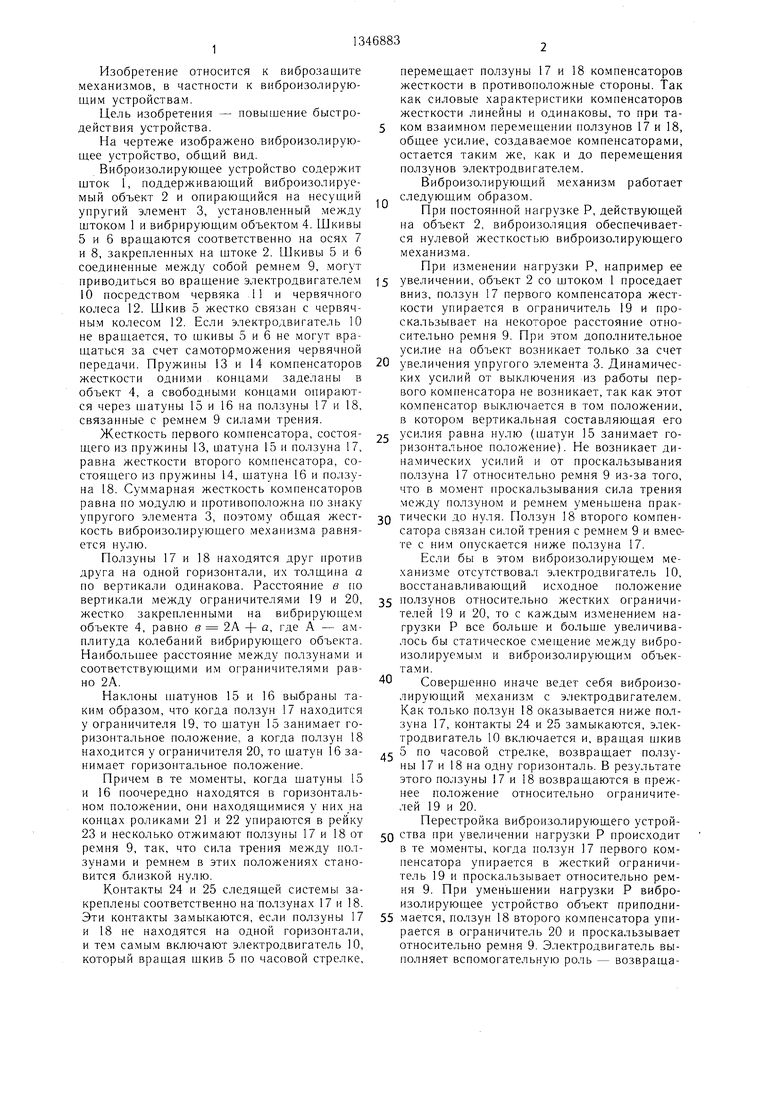
| название | год | авторы | номер документа |
|---|---|---|---|
| Компенсатор жесткости | 1983 |
|
SU1115965A1 |
| КОМПЕНСАТОР ЖЕСТКОСТИ УПРУГОЙ ОПОРЫ | 2000 |
|
RU2215210C2 |
| Шпиндельный узел | 1975 |
|
SU546437A1 |
| ВИБРОИЗОЛИРУЮЩАЯ СИСТЕМА | 2011 |
|
RU2481504C2 |
| ВИБРАЦИОННАЯ МАШИНА ДЛЯ ПРЕДВАРИТЕЛЬНОГО УПЛОТНЕНИЯ ВОЙЛОЧНОГО ПОЛУФАБРИКАТА | 1972 |
|
SU355267A1 |
| Виброизолирующая подвеска объекта | 1983 |
|
SU1123917A1 |
| ВИБРОИЗОЛИРУЮЩАЯ СИСТЕМА | 2016 |
|
RU2638366C1 |
| Компенсатор жесткости | 1983 |
|
SU1113604A1 |
| Станок-автомат для ударного клеймения в торец цилиндрических изделий типа "стакан" | 1973 |
|
SU473545A1 |
| СТАНОК-КАЧАЛКА С АВТОМАТИЧЕСКИМ НАТЯЖИТЕЛЕМ ПРИВОДНЫХ РЕМНЕЙ | 2020 |
|
RU2734397C1 |
Изобретение относится к виброзащите механиз.1ов, в частности к виброизолирующим устройствам. Цель изобретения - но- выщение быстродействия устройства. Виброизолирующее устройство содержит щток. I, поддерживающий виброизолируе.мый объект 2 и опирающийся на упругий элемент 3, установленный между штоком 1 и вибрирую- щи.м объектом 4. Шкивы 5 и 6 вращаются соответственно па осях 7 и 8, закрепленных на щтоке 2. Шкивы 5 и 6 соединены между собой ремнем 9 и приводятся во вращение электродвигателем 10 посредством червяка 11 и червячного колеса 12. Шкив 5 жестко связан с червячны.м колесом 12. Пружины 13 и 14 компенсаторов жесткости одними концами заделаны в объект 4, а свободными концами опираются через шатуны 15 и 16 на ползуны 17 п 18, связанные фрик- ционно с ремнем 9. Устройство имеет ограничители 19 и 20. На конца.х шатунов 15 и 16 установлены ролики 21 и 22, упирающиеся в рейку 23, а на ползунах 17 и 18 установлены контакты 24 и 25. 1 з. п. ф-лы, 1 ил. /////////f///////////// J (Л со 4:: О5 оо оо со
| Подвеска сиденья | 1980 |
|
SU903231A1 |
| Способ получения молочной кислоты | 1922 |
|
SU60A1 |
