1
Изобретение относится к ма1иинострое- нию и может быть использовано в следящих приводах рабочих органов землеройных машин.
Цель изобретения - новышение надежности работы следящего гидромеханического привода.
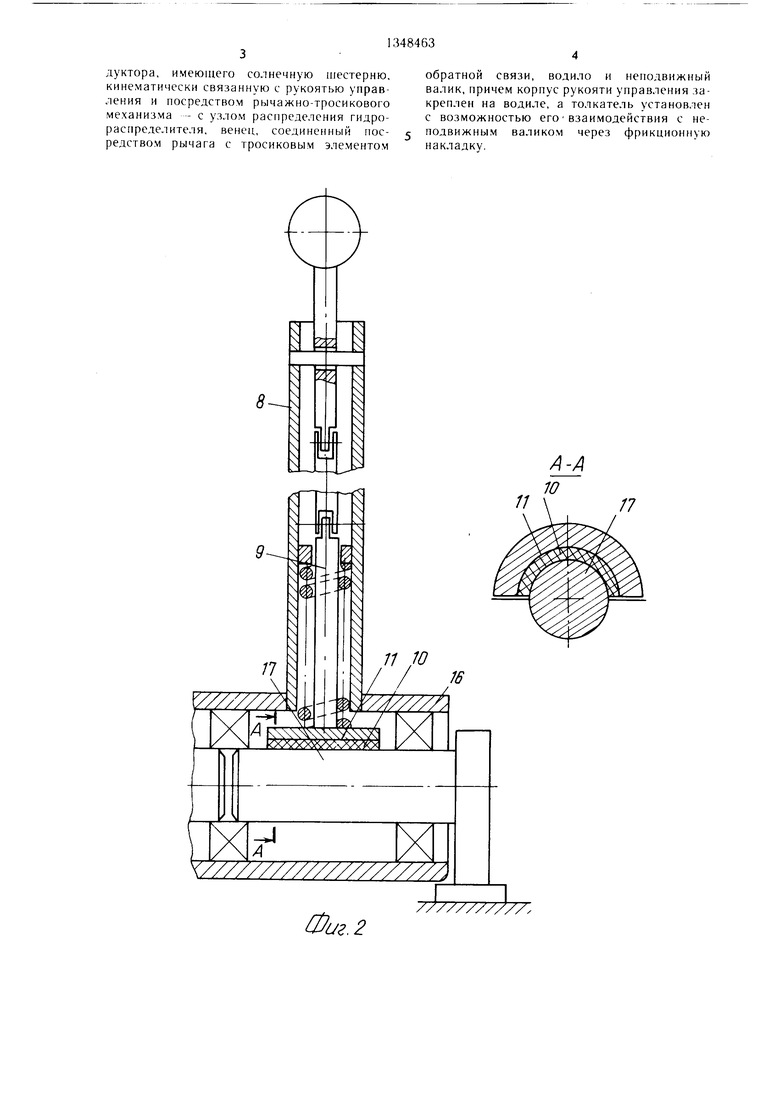
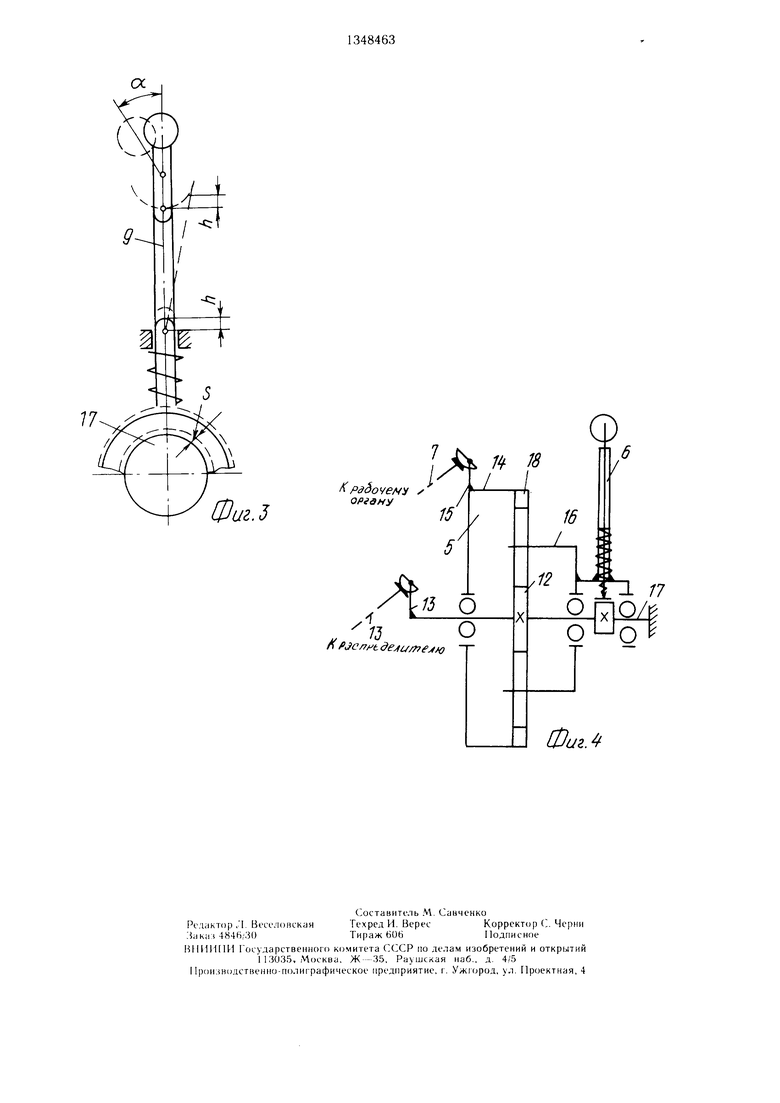
На фиг. 1 изображена принципиальная схема следящего гидромеханического привода; на фиг. 2 - рукоять управления; на фиг. 3 - кинематическая схема рукояти управления на фиг. 4 - кинематическая схема дифференциального зубчатого механизма.
Следящий гидромеханический привод рабочего органа землеройной машины содержит насос 1, гидрораспределитель 2 с узлом 3 распределения, гидроцилиндр 4 и следящее устройство управления. Следящее устройство управления состоит из дифференциального зубчатого механизма 5. рукоя- ти 6 управления, соединенной через последний с узлом 3 рас 1ределения гидрораспределителя 2, и кинематически связанный с гидроцилиндром 4 и дифференциальным зубчатым механизмом 5 тросиковый элемент обратной связи 7. Рукоять 6 управления снабжена корпусом 8 с размещенным в нем подпружиненным толкателем 9, выполненным с фрикционной накладкой 10 на его рабочей поверхности 11. Дифференциальный зубчатый механизм выполнен в виде планетарного редуктора, имеющего солнечную шестерню 12, кинематически связанную с 1п коятью 6 управления и посредством рычажно-тросиковогс механизма 13 с узлом 3 распределения гидрораспределителя 2, венец 14, соединенный посредством рычага 15 с тросиковым элементом 7 обратной связи, водило 16 и неподвижный валик 17. Корпус 8 рукояти 6 управления закреплен па водиле 16, а толкатель 9 установлен возможностью ег О взаимодействия с неподвижным валиком 17 через фрикцион- ную накладку 10. Планетарный редуктор включает в себя сателлиты 18. Шток гид- ропилиндра 4 соединен с рабочим органом 19.
Следящий гидромеханический привод работает следующим образом.
При перемещении рукояти 6 унравления, например, влево (фиг. 1) на угол а то.ткатель 9 поднимается на высоту h и между фрикционной накладкой 10 и неподвижным валиком 17 возникает щель величиной S (фиг. 3), рукоять 6 управления растормаживается.
При дальнейшем движении рукояти 6 управления влево она вращает водило 16 (фиг. 4) и сателлиты 18, обкатываясь по неподвижному венцу 14, приводят во враще- ние солнечную шестерню 12. Рычажно-троси- ковый механизм 13 (фиг. 1) перемещает узел 3 распределения вправо, и жидкость от насо
463
2
са 1 поступает в поршневую полость гидроцилиндра 4. Гидроцилиндр 4 начнет заглублять рабочий орган 19, что вызывает вытягивание гибкого троса тросикового эле- мента 7 обратной связи. Рычаг 15 начинает вращать венец 14 против часовой стрелки, что приводит к повороту солнечной щестер- ни 1 и связанного с ней вала по часовой стрелке. Узел 3 распределения под действием гибкого троса рычажно-тросикового механизма 13 перемещается влево и перекрывает поток жидкости от насоса 1 к гидроцилиндру 4. При непрерывном движении рукояти 6 управления влево рабочий орган 19 непрерывно заглубляется со скоростью, пропорциональной скорости движения рукояти 6 управления.
5
0 0
5
0
5
5
0
Когда рукоять 6 управления, останавливается, толкатель 9 под действием пружины опускается и прижимается фрикционной накладкой 10 к неподвижному валику 17. Рукоять 6 управления фиксируется относительно неподвижного валика 17, движение гибкого троса тросикового элемента 7 обратной связи ие оказывает воздействия иа рукоять 6 управления, а приводит к выключению гидрораспределителя 2 и остановке рабочего органа 19.
При перемещении рукояти 6 управления вправо происходит подъем толкателя 9 и растормаживание рукояти 6 управления. Рычажно-тросиковый механизм 13 перемещает влево посредством гибкого троса узел 3 распределения. Жидкость от насоса 1 поступает в щтоковую полость гидроцилиндра 4.
Поворачиваясь по часовой стрелке, гидроцилиндр 4 посредством гибкого троса перемещает вправо рычаг 15, связанный с венцом 14, в результате чего солнечная шестерня 12 поворачивается против часовой стрелки и гидрораспределитель 2 выключается.
Формула изобретения
Следящий гидромеханический привод рабочего органа землеройной машины, содержащий насос, гидрораспределитель с узлом распределения, гидроцилиндр и следящее устройство управления, включающее дифференциальный зубчатый механизм, рукоять управления, соединенную через последний с узлом распределения гидрораспределителя, и кинематически связанный с гидроцилиндром и дифференциальным зубчатым механизмом тросиковый элемент обратной связи, отличающийся тем, что, с целью повыщеиия надежности его работы, рукоять управления снабжена корпусом с размещенным в нем подпружиненным толкателем, выполненным с фрикционной накладкой на его рабочей поверхности, а дифференциальный зубчатый механизм выполнен в виде планетарного редуктора, имеющего солнечную шестерню, кинематически связанную с рукоятью управления и носредством рычажно-тросикового механизма - с узлом распределения гидрораспределителя, венец, соединенный посредством рычага с тросиковым элементом
обратной связи, водило и неподвижный валик, причем корпус рукояти управления закреплен на водиле, а толкатель установлен с возможностью его взаимодействия с неподвижным валиком через фрикционную накладку.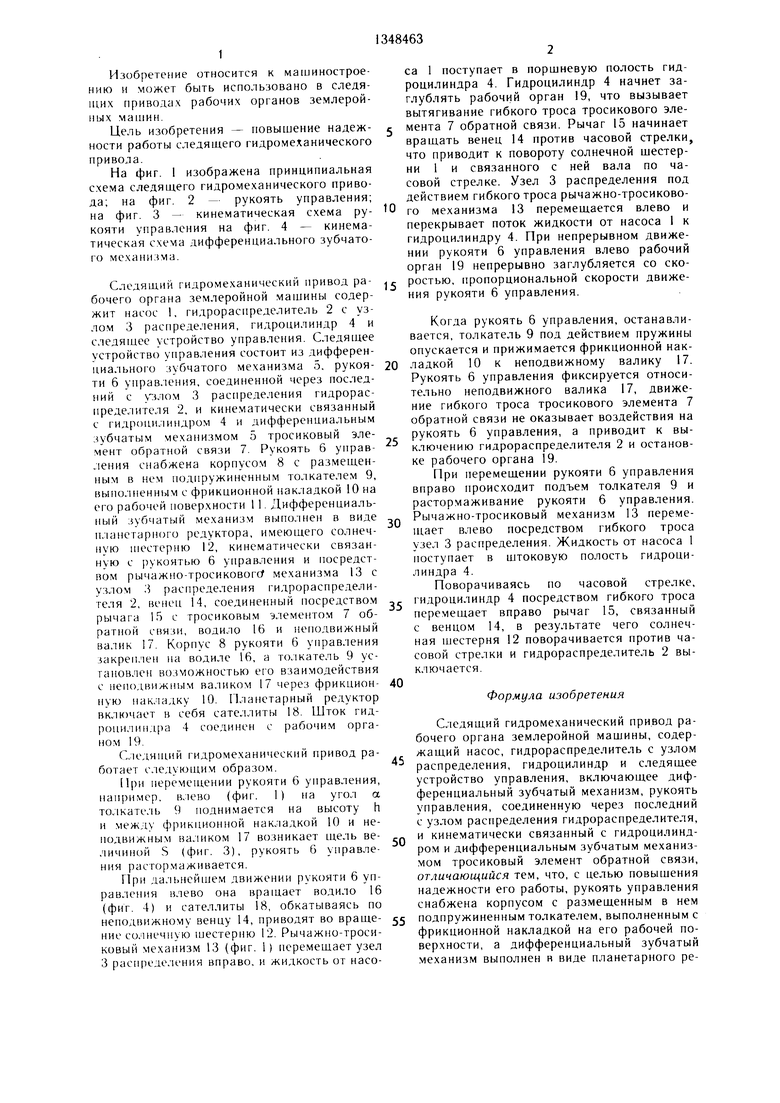
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство автоматического управления гидравлическим экскаватором | 1988 |
|
SU1641953A1 |
| Следящая система управления рабочим органом землеройной машины | 1985 |
|
SU1308721A1 |
| Гидропривод рабочего оборудования фронтального погрузчика | 1989 |
|
SU1680887A1 |
| НАВЕСНОЕ К ТРАКТОРУ ОБОРУДОВАНИЕ ДЛЯ БУРЕНИЯ ЯМ ПОД СТОЛБЫ | 1962 |
|
SU152429A1 |
| Программное устройство | 1988 |
|
SU1733370A1 |
| Устройство для автоматического вождения самоходной сельскохозяйственной машины | 1981 |
|
SU952122A1 |
| Система управления гидравлическим манипулятором лесозаготовительной машины | 1979 |
|
SU861063A1 |
| Гидропривод рабочего оборудования фронтального погрузчика | 1989 |
|
SU1745843A1 |
| ГИДРОМЕХАНИЧЕСКОЕ СЛЕДЯЩЕЕ УСТРОЙСТВО СЕЛЬСКОХОЗЯЙСТВЕННОЙ МАШИНЫ | 2007 |
|
RU2372216C2 |
| Бурильный агрегат | 1980 |
|
SU1002570A1 |
И.чобретеиие относится к мап1ииострое- иию и повышает надежность работы следящего гндро.ме.ханическогс) привода, вклю- чакмцегч) насос I, гидрораспределитель 2 с рас11реде.-|ения (УР) 3, следя1пее устр-во уп)авления и гидрони.чиндр (ГИ) 4. Устр-во управления включает дифференциальный ;п бчатый ме.ханизм 5, рукоять 6 управления и тросиковый э.че.мент (ТЭ) 7 гибкой обратной свя.ш. С ГЦ 4 и механизмом 5 кинематически связан ТЭ 7 обратной связи. Рукоять 6 через ме.хаиизм 5 соединена с УР 3 и снабжена закрепленным на водиле корпусом 8. В корпусе 8 размещен подпружиненный толкатель с фрикционной накладкой на его рабочей но- вер.хности, через нее взаимодействуюп1ий с неподвижным валико.м 17. Механизм 5 вьикхл- неп в виде планетарного редуктора, имеющего солнечную Н1естерню, кинематически связанную с рукоятью 6 и носредством рычажно-тросикового механизма 13с УР 3. С ТЭ соединен венеп 14 посредством рычага 15. При заглуб:1ении рабочего органа I9 ТЭ втягивается, рычаг 5 поворачивает венец 14 против часовой стре.чки. Это приводит к повороту шестерни, а УР 3 неремепщется влево и перекрывает поток жидкости от насоса I к ГЦ 4. Ирм непрерывно.м движении рукояти 6 влево рабочий орган 19 будет непрерьГвно заглубляться со скоростью, пропорциональной ско- ростп движения рукояти 6. 4 ил. сл 00 4 ОО N О5 CO
.2
/7
Фиг.З
| Следящий гидропривод рабочего органа землеройной машины | 1982 |
|
SU1084391A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Авторское свидетельство СССР ,Ч 1244250 кл | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
