13
Изобретение относится к автоматик и вычислительной технике, может быть использовано в системах числового программного управления станками, прежде всего токарными станками, для обработки зеркал, а также асферической оптики.
Целью изобретения является создание возможности интерполяции эллип- сов с произвольным соотношением осей и повышение быстродействия.
На фиг. I изображена структурная схема предлагаемого устройства; на фиг. 2 - пространственная аналогия, поясняющая принцип действия устройства, т.е. интерполяцию эллипса; на фиг. 3 - схема блока 5 управления, приведенная в варианте; на фиг. 4 - функциональная схема двухкоординатно- го интерполятора 2 с принудительным шагом на большей координате; на фиг. 5 - временная диаграмма работы двухкоординатного линейного интерполятора с принудительным шагом по большей координате.
Устройство содержит круговой интерполятор 1, двухкоординатный линейный интерполятор 2 с принудительным шагом по большей координате, счетчи- ки 3 и 4, блок 5 управления.
Блок 5 управления содержит триггеры 6 и 7, элемент КПИ 8, элемент И 9.
Двухкоординатный линейный интерполятор 2 с принудительным шагом по большей координате содержит накапливающий сумматор 10 оценочной функции блок I1 элементов ИЛИ, первый 12 и второй 13 блоки элементов И, первый 14 и второй 15 регистры, элемент И 16 элементы 17 и 18 задержки.
Пространственная аналогия (фиг. 2) показывает, что при выполнении в плоскости Z J- круговой интерполяции окруж- ности радиуса R проекция этой окружности на плоскость XZ дает эллипс с осями , a Rcosct, где oi. - угол между осями Х,у или между плоскостями Z( и XZ. В случае интерполяции дуги АБ окружности радиуса R проекция этой дуги на плоскость ZX дает дугу А Б эллипса с осями , a Rcosoci.
Убедимся, что схема фиг. 1 выпол
няет интерполяцию дуги эллипса Д В . Перед началом работы занесем информацию в блоки устройства: в круговой интерпол ;тор I - величины Z „
и
где ;V,
п линейный инь
Q
15 о 25
о
0
5 Q
35
5
терполятор 2 - величины R и a Rcosod; в счетчики 3,4 - величины uZ и ЛХ в дополнительном коде, причем д . По сигналу Пуск, поступающему на второй вход блока 5 управления, с его выхода на вход ар- , гумента кругового интерполятора 1 начинает поступать импульсы частоты f. Круговой интерполятор 1 начинает интерполяцию окружности радиуса R в координатах Z,Y от точки А по часовой стрелке, так как задана команда G02 (интерполяция по часовой стрелке) в сторону точки Б. Выходные импульсы координаты Z поступают на первый вход счетчика 3 и на выход устройства. Выходные импульсы координаты Y поступают на вход аргумента линейного интерполятора 2, который начинает интерполировать прямую, заданную вели-чинами R и а. Так как линейный интерполятор 2 вьтолнен по схеме с принудительным шагом по большей координате, а , то каждый импульс аргумента, который является импульсом координаты ) интерполятора 1, проходит на выход линейного интерполятора 2 по координате У, причем в нашем случае он не используется. А каждый импульс координаты, в которую записана величина а, проходит на выход устройства по координате X и на первый вход счетчика 4. Так как количество импульсов на выходах координат у интерполяторов 1 и 2 равно, а линейный интерполятор 2 решает пропорцию a:R, то очевидно, что в осях XZ устройство будет интерполировать заданный эллипс. Интерполяция закончится, когда с выходов устройства пройдет соответственно uZ ийХ импульсов, при этом переполняются счетчики 3, 4 и сигналы их переполнения поступят в блок 5. При этом блок 5 прекращает пропускать импульсы частоты f на вход аргут-1ента кругового интерполятора 1. Отработка заданного участка эллипса закончена..
Блок 5 управления (фиг. 3) работаем т следующим образом.
По сигналу Пуск триггеры 6 и 7 уст.-у1,1вливаются в состояние 1, их У1-.1Ходные единичные потенциалы через элемент ИЛИ 8 открывают элемент И 9, выходная частота f которого начинает поступать на вход аргумента интерполятора 1 . Сигнал с выд; счетчика 3 с:5раг.ызает в О грш гер 6, сигнал с
выхода счетчика 4 сбрасьтает в О триггер 7, В результате на обоих входах элемента ИЛИ 8 оказьшаются нулевые потенциалы, на его выходе - также О и, следовательно, закрывается элемент И 9. Прохождение импульсов частоты f на вход аргумента интерполятора 1 прекращается.
Линейный интерполятор 2 (фиг. 4) работает следуюпщм образом.
Перед началом работы в регистр 14 заносится величина R, а в регистр 15 - а в дополнительном коде, причем . Сумматор 10 сброшен в О. Поскольку нуль - число положительное, то .
Пришедший на вход первый импульс проходит на выход по координате х и через элемент 18 задержки поступает на управля О 1Щй вход блок,а 13 элементов И. В сумматор 10 добавляется дополнительный код числа а. В результате U-iO. Следующий импульс с входа проходит по координате У на выход, через элемент 18 задержки - на вход блока 13, через элемент И 16, открытый сигналом , на выходе по координате X и через элемент 17 задержки - на вход блока 12.
Величины задержек в элементах 17 и 18 делают неодинаковыми, поэтому в сумматор 10 последовательно добавляется прямой код величины R и дополнительный код величины а, т.е. величина (R-a). Но , поэтому величина (R-a)0. В сумматоре была величина отрицательная, к ней добавляется - . положительная. Следующий входной импульс отработается в зависимости от знака и, как в первом или как ца втором случае.
Пример. Пусть , . Тогда работа интерполятора соответствуе таблице.
Таблица отражает временную диаграмму на фиг. 5, т.е. на 10 импульсов на входе линейный интерполятор 2 формирует 10 импульсов на своем выходе у и один импульс на выходе X, причем входной импульс линейного интерполятора 2 и импульс по большей (j) координате всегда совпадают. Кроме того, импульс по меньшей координате (X) выдается одновременно с импульсом по большей координате.
Формула изобретения
Устройство для задания программы, содержащее круговой интерполятор и первый счетчик, отличающее- с я тем, что, с целью обеспечения возможности интерполяции эллипсов с
5 произвольным соотношением осей и по- вьш1ения быстродействия, введены двух- координатный линейный интерполятор с принудительным шагом по большей координате, блок управления и второй
0 счетчик, причем первый выход кругового интерполятора подключен к первому входу первого счетчика, а второй выход - к входу аргумента двухкоорди- натного линейного интерполятора с
5 принудительным шагом по большей координате, первый выход которого соединен с первым входом второго счетчика, выходы переполнения первого и второго счетчиков подключены к первым вхо0 дам блока управления, второй и третий входы которого являются пусковым входом и частотным входом устройства соответственно, выход блока управления соединен с входом аргумента кругового интерполятора, первые входы которого являются входами координат начальной точки интерполяции, второй вход кругового интерполятора является входом направления интерполяQ ции, первые входы двухкоординатного линейного интерполятора с принудительным шагом по большей координате являются входами величин осей эллипса, вторые входы первого и второго счетчиков являются входами приращений координат, первый выход кругового интерполятора и первый и второй выходы двухкоординатного линейного интерполятора с принудительным шагом по большей координате являются коор5
0
динатными выходами устройства.
ZH , XH)
AIZH.H}
5(ZKfXf() ВИк K)
Фиг. 2
фиг. J
ю
/h
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для задания программы | 1986 |
|
SU1312529A1 |
| Устройство для задания программы обработки в полярных координатах | 1987 |
|
SU1409974A1 |
| Устройство для задания программы в полярных координатах | 1986 |
|
SU1396125A1 |
| Устройство для задания программы | 1986 |
|
SU1327062A1 |
| Устройство для коррекции положения резца на станке с программным управлением | 1981 |
|
SU983651A1 |
| Цифровой интерполятор | 1986 |
|
SU1310778A1 |
| Устройство для программного управления | 1986 |
|
SU1376065A1 |
| Многокоординатный линейно-круговой интерполятор | 1988 |
|
SU1603345A1 |
| Устройство для программного управления | 1984 |
|
SU1193643A1 |
| Линейно-круговой интерполятор | 1975 |
|
SU555381A1 |
Изобретение относится к автоматике и вычислительной технике и может быть использовано в системах ЧПУ токарными станками для обработки зеркал, а также асферической оптики. Целью изобретения является обеспечение- интерполяции эллипсов с произвольным соотношением осей и повышение быстродействия. В устройство введены двух- координатный линейный интерполятор 2 с принудительным шагом по большей координате, блок управления 5 и второй счетчик 4. Обработка эллипса задается одним кадром программы, что упрощает программирование и сокращает обьем устройства. 5 ил., 1 табл. с & (Л СХ7 4 оо vj со Фие.1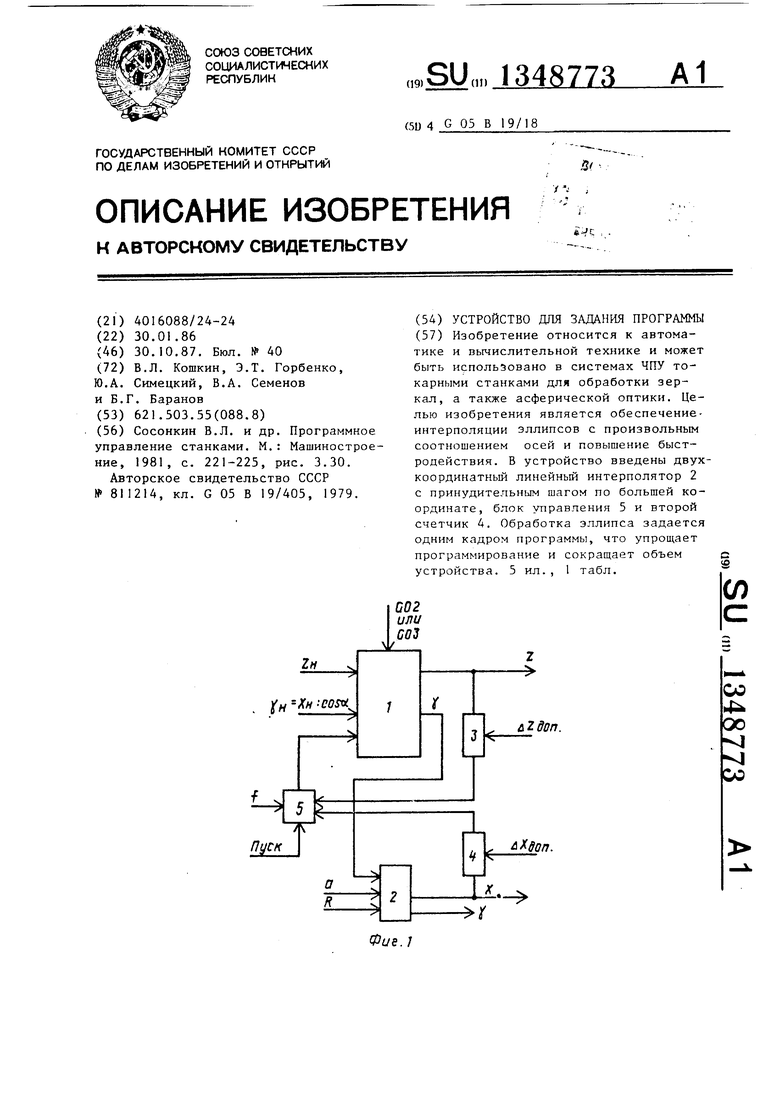
ц 18
X
1 2 3 5 S 7 в 9 WriJ213
ша I I I I I I I I I I I I I I I I
У.,г.Л I I I I I I I I I I I I I I I
2 /2
1 Вы ход I
Составитель A. Исправникова Редактор A. Маковская Техред Л,Сердюкова Корректор С. Шекмар
Заказ 5186/45 . Тираж 862Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
J
/
/J
/5
Л7/7.
Фиг. «
;0i/f, 5
| Сосонкин В.Л | |||
| и др | |||
| Программное управление станками | |||
| М.: Машиностроение, 1981, с | |||
| Способ изготовления замочных ключей с отверстием для замочного шпенька из одной болванки с помощью штамповки и протяжки | 1922 |
|
SU221A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| Топка с несколькими решетками для твердого топлива | 1918 |
|
SU8A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
