с выходом генератора импульсов, второй вход десятого элемента И подключен к второму выходу первого тригге1193643
ра, а выход четвертого элемента И через пятый триггер соединен с элементом индикации.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для программного управления | 1986 |
|
SU1376065A1 |
| Цифровой интерполятор | 1986 |
|
SU1310778A1 |
| Устройство для двухкоординатного программного управления | 1981 |
|
SU962857A1 |
| Устройство для задания программы | 1986 |
|
SU1363139A1 |
| Устройство для коррекции положения резца на станке с программным управлением | 1981 |
|
SU983651A1 |
| Система для программного управления | 1985 |
|
SU1325410A1 |
| Устройство для задания программы | 1986 |
|
SU1348773A1 |
| Устройство для задания программы обработки в полярных координатах | 1987 |
|
SU1409974A1 |
| Устройство для задания программы | 1986 |
|
SU1327062A1 |
| Линейно-круговой интерполятор | 1975 |
|
SU555381A1 |
УСТРОЙСТВО ДЛЯ ПРОГРАММНОГО УПРАВЛЕНИЯ, содержащее интерполятор, блок задания скорости, последовательно соединенные генератор импульсов, первый триггер и первый элемент И, а также датчик резьбонарезания, второй триггер, элемент задержки, элемент индикации, блок управления приводами и приводы, отличающетем,, что, с целью повышения еся точности устройства и его упрош;ения, в него введены первый и второй блоки синхронизации, четыре триггера, девять элементов И и элемент ИЛИ, первый вход которого через второй элемент И соединен с выходом блока задания скорости я с первым входом третьего элемента И, подключенного вторьм входом к первому входу четвертого элемента И и к выходу третьего триггера, а выходом - к второму входу элемента ИЛИ, выход которого соединен с первым входом интерполятора и с R-входом второго Триггера, S-вход которого подключен к входу . , Пуск устройства, а выход - .к пер- вым входам пятого и шестого элементов И, выход шестого.элемента И соединен с S-входом четвертого триггера, выход которого подключен к второму входу второго элемента И, С-входы четвертого и пятого триггеров подключены к первому выходу интерполятора, второй выход которого соединен с первым входом блока управления приводами, третий выход интерполя.тора - с первыми входами седьмого и восьмого элементов И, выход седьмого элемента И подключен к второму входу блока i управления приводами, а выход восьмого элемента И через элемент задержки соединен с R-входом третьего триггера, С-вход которого подключен к второму входу четвертого элемента И и через девятый элемент И - к выходу первого блока синхронизации, первый вход которого соединен с выходом первого элемента И и с вторым входом шестого элемента И, второй вход пероо о вого блока синхронизации - с выходом датчика резьбонарезания, второй вы- 4 ход которого через второй блок синСО хронизации подключен к второму входу пятого элемента И, соединенного .выходом с S-входом пятого триггера, выход которого подключен к второму .входу девятого элемента И, второй вход второго блока синхронизации соединен с выходом десятого элемента И и с первым входом блока задания ско.рости, второй вход которого соединен с вторым входом устройства, второй вход первого элемента И и первый вход десятого элемента И соединены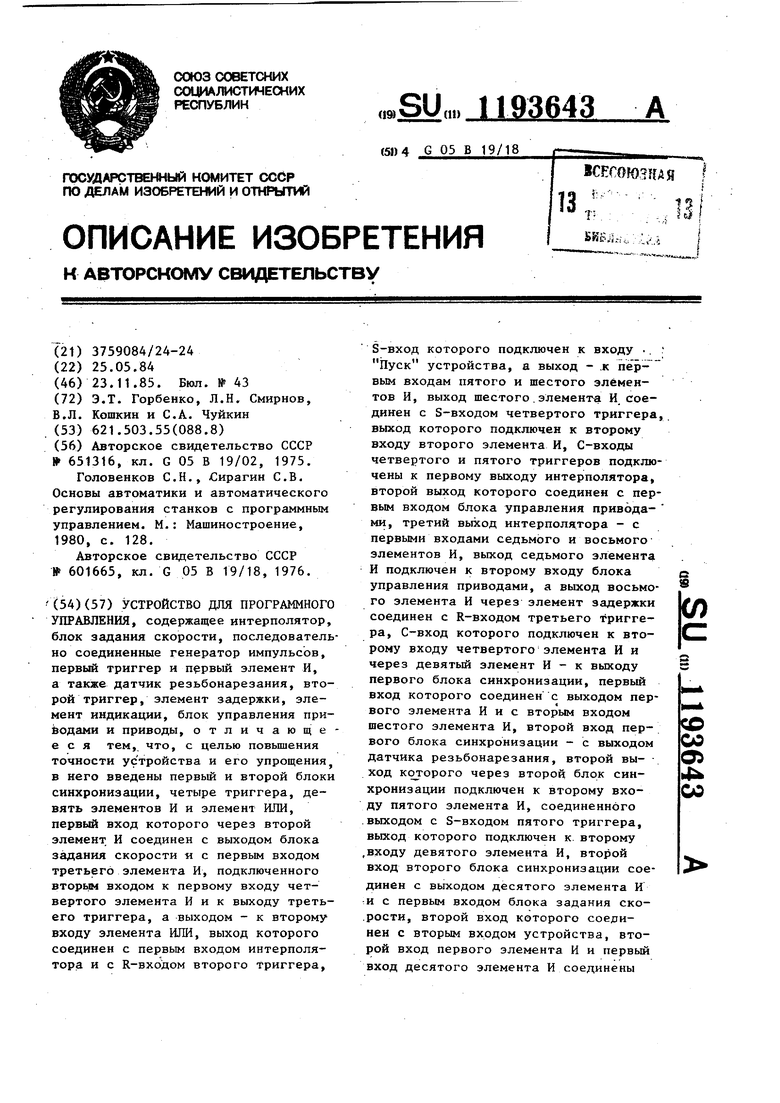
Изобретение относится к области автоматики и вычислительной техники и может быть использовано в устройствах числового программного управления токарными станками и другим технологическим оборудованием, которое реализует операцию резьбонарезаНИЯо
Целью изобретения является повышение точности нарезания резьб с большим шагом при одновременном упрощении благодаря использованию интерполятора тока устройства и его блока задания скорости для равномерного заполнения импульсами промежутка между импульсами датчика резьбокарезания с соответствующей синхронизацией.
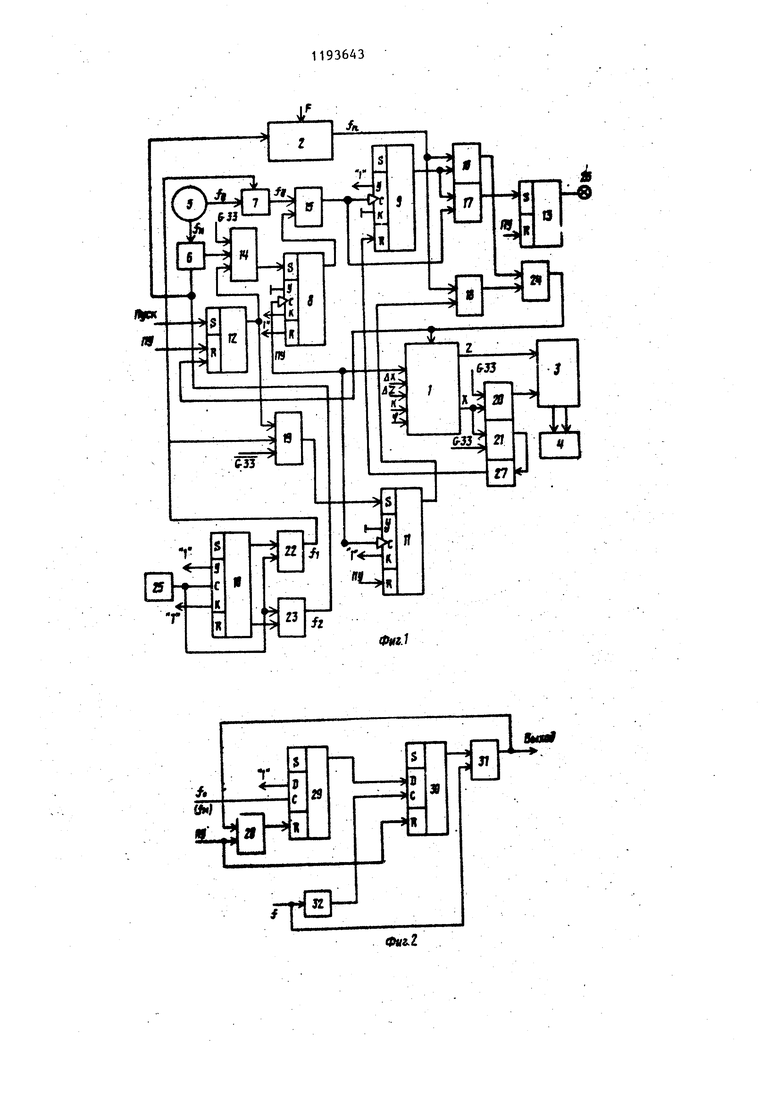
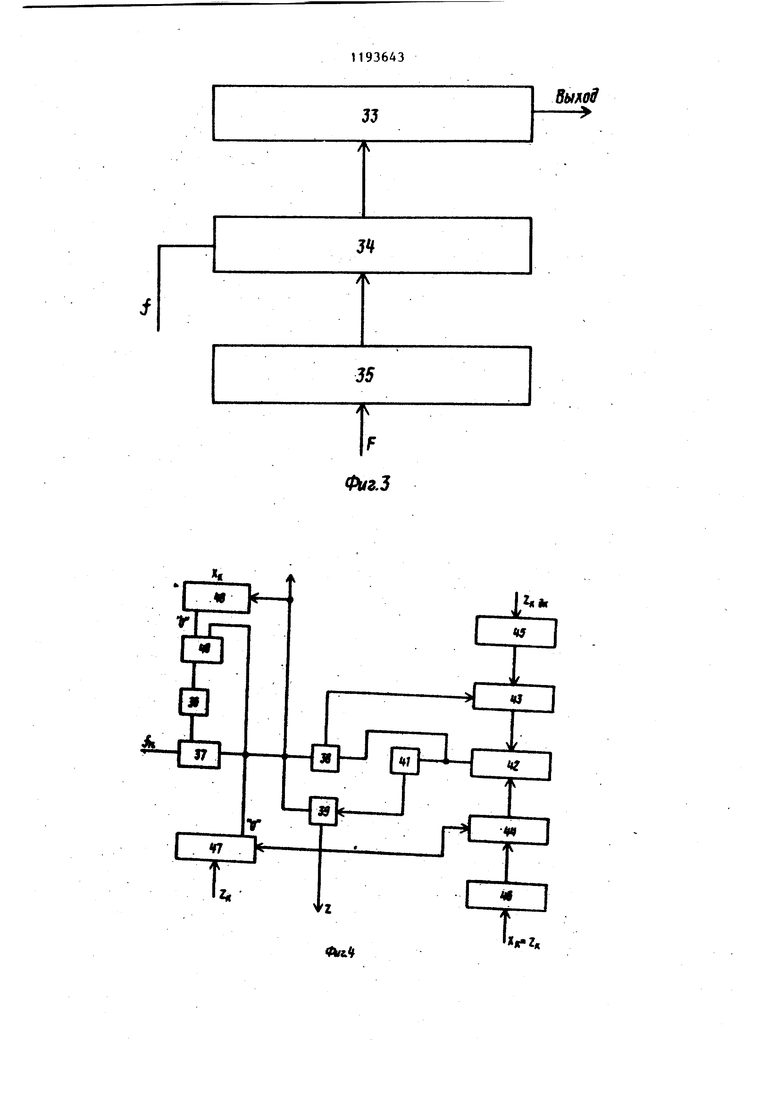
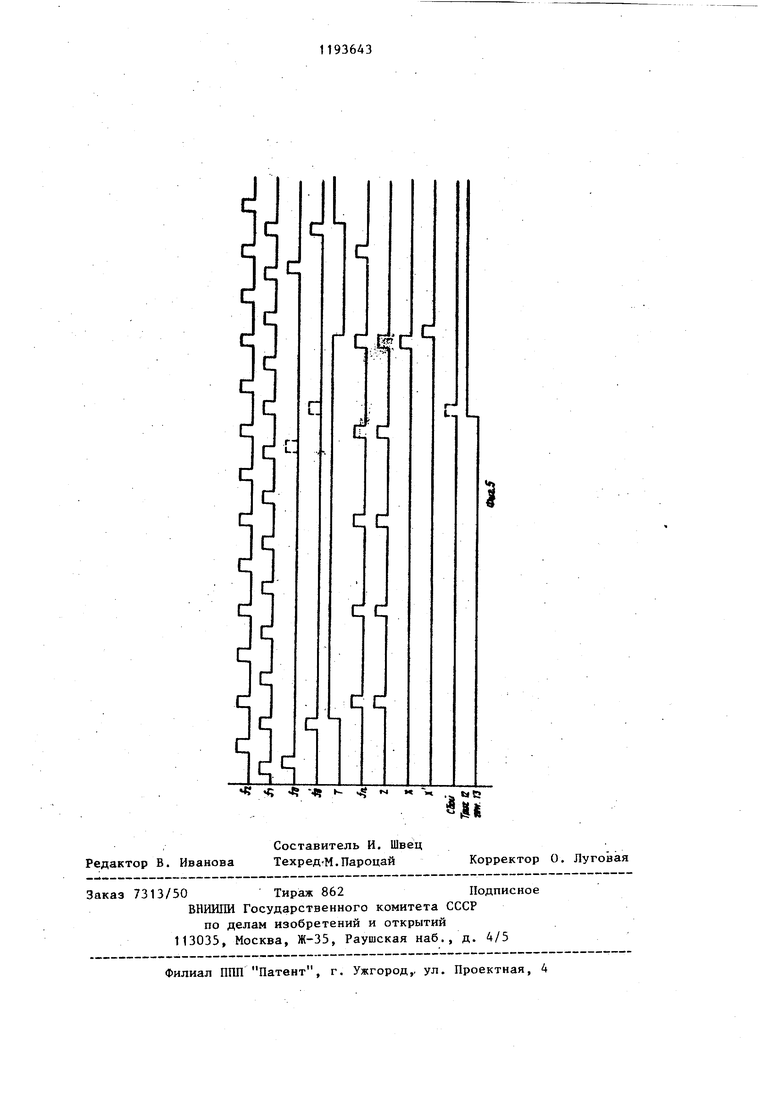
На фиг. 1 изображена функциональная схема предлагаемого устройства; на фиг, 2 - вариант исполнения схем синхронизации; на фиг. 3 - вариант выполнения блока задания скорости; на фиг, 4 - вариант выполнения интерполятора; на фиг. 5 - временная диаграмма работыустройства.
Устройство (фиг. 1) состоит из интерполятора 1, блока 2 задания скорости, блока 3 управления приводами, приводов 4, датчика резьбонарезания 5, блоков 6 и 7 синхронизации,1-Ктриггеров 8-11, R-S-триггеров 12 и 13, элементов И 14-23, элемента ИЛИ 24, генератора 25 импульсов, элемента 26индикации, элемента 27 задержки.
Блок синхронизации (фиг. 2) содержит элемент ШШ 28, RS-триггеры 29 и 30, элемент И 31, э;1емент АЕ 32 Блок 2 задания скорости (фиг. 3) содержит накапливающий сумматор 33, блок 34 ключей и регистр 35. Интерполятор (фиг. 4) содержит элемент НЕ 36, элементы И 37-40, элемент НЕ 41, накапливающий сумматор 42, блоки ключей 43 и 44, регистры 45 и 46, вычитающие счетчики 47 и 48.
Предлагаемое устройство работает в двух режимах: интерполяции и резь-: бонарезанйя.
В режиме интерполяции в устройстве
имеется потенциал интерполяции
(Q33), который вырабатывается центральным устройством управления (не показано). Сигнал предварительной установки сбрасывает в О триггеры
8-13. Информация с выхода вводного устройства (не показано) распреде ляется по блокам следующим образом: в интерполятор 1 заносится код приращения лх, &Z (при линейной интерполяции), в блок 2 задания скорости код подачи F. По сигналу Пуск триггер 12 устанавливается в единичное состояние и единичный потенциал с его выхода поступает на входы
0 элементов И 14 и 19. В этом режиме элемент 14 закрыт, так как отсутствует сигнал режима резьбонарезания G 33.. На элементе И 19 имеется потенциал режима интерполяции G 33,
5 поэтому с приходом импульса частоты f на его третий вход, он открывается, и его выходной сигнал устанавливает в 1 триггер 11. Частоты формируются элементами И 22
0 и 23, сдвинутыми на 180 путем деления с помощью триггера 11 частоты f генератора 25. Как только триггер 11 устанавливается в состояние 1, . открывается элемент И 18 и импуль.сы частоты f соответствующей заданной скорости подачи с выхода блока 2 задания скорости начинают поступать через элемент ИЛИ 24 на вход аргумента интерполятора 1.
Первый же импульс с выхода.элемента ШШ 24 сбрасывает в О триггер 12, поэтому закрывается элемент И 19 и повторные запускающие сигналы на вход триггера 11 не приходят. Так как элемент И 19 запитан частотой f, а блок задания скорости ра3ботает на частоте f, то в момент переключения в единицу триггера 11 урезаний импульса на выходе элемент И 18 не происходит. Интерполятор 1 начинает отрабатывать заданные пере мещения и его выходные сигналы по координате непосредственно, а по ко ординате -х через элемент И 20, открытый сигналом G 33, поступают на входы блока 3 управления приводами, который формирует управляющие анало говые сигналы, которые поступают на вход приводов 4, Приводы 4 отрабатывают заданную программу. Так продолжается до тех пор, пока задан ное перемещение не будет отработано до коИца. Тогда интерполятор 1 формирует сигнал окончания отработки, который поступает на синхропривод триггера 11, и своим задним фронтом сбрасывает его в О. Прохозвдение частоты через элемент И 18 на вход интерполятора 1 прекращается. Задан ный кадр программы отработан. В режиме резьбонарезания устройство работает следующим образом. В интерполятор 1 заносится длина .|резьбыД2, шаг резьбы К, а в коор динату X - число Cf , равное количеству импульсов, формируемых на вход датчика 5 за один оборот шпинделя. В блок 2 задания скорости заносится код подачи, равной подаче, которая будет при нарезании резьбы заданного шага при заданных оборотах. Код подачи вычисляется по формуле ; F п«К, где F - код подачи, п число оборотов в минуту, Kj - шаг резьбы мм/оборот. В устройстве присутствует потенциал резьбонарезания G 33 и отсутствует потенциал интерполяции G 33. По сигналу Пуск триггер 12 устанавливается в состояние 1. При этом его выходной сигнал открывает по второму входу элемент И 14, по первому входу откры тый потенциалом G ЗЗ. Импульсы частоты маркера , которые вырабатываются один .раз за оборот шпинделя, поступают на вход схемы 6 синхронизации, где синхронизируются частотой f. Первый же после переключения триггера 12 в единицу маркерный импульс проходит через элемент И 14 и устанавлива1ет в 1 триггер 8. Единичный выходной сигнал триггера 8 открывает элемент И 15. Поэтому импульсы частоты датчика через схему 7 синхрони43зации, где они синхронизируются .частотой f g , и элемент И 15 поступают на синхровход триггера 9 и на вход элемента И 17. Однако элемент И 17 закрыт нулевым потенциалом с выхода триггера 9. Триггер 9 переключается в состояние 1 по заднему фронту синхроимпульса. Единичный потенциал с выхода .триггера 9 поступает на входы элементов И 16 и 17. Поэтому импульсы частоты f с выхода блока 2 задания скорости через элемент И 16 и элемент ИЛИ 24 поступают .на вход интерполятора 1 и, кроме того, на R-вход триггера 12, причем первый же импульс сбрасывает триггер 12 в О, что исключает возможность повторных пусков. Интерполятор начинает отработку, при этом импульсы по координате z поступают в блок 3 управления приводом в то время, как выходные сигналы по координате х - в блок 3 управления приводом не поступают, так как элемент И .20 закрыт ввиду отсутствия потенциала G 33, а открыт элемент И 21, и с его выхода импульсы с. координаты X поступают на R-вход триггера 9 и сбрасывают его в О. При нормальной работе устройства в этом режиме код F определен правильно. частота f на выходе блока 2 достаточно высока, то до прихода на синхровход триггера 9 очередного импульса с выхода датчика, на выходе координаты х интерполятора будет сформирован импульс, который через элемент И 21 и элемент задержки 27 сбросит в О триггер 9 и, следовательно, закроет элемент И 16 и прекратит поступление импульсов частоты f на вход ; интерполятора, до тех пор, пока очередной импульс частоты f 9 не переключит в единицу триггер 9. Благодаря наличию такой связи, выходная частота по координате X оказывается равной частоте датчика f „. Но ,в координату х записан код tf числа отсчетов датчика 5 за оборот шпинделя, а в координату Z шаг резьбы, следовательно, пока датчик 5 сделает один оборот, на выходе X интерполятора 1 будет С/ импульсов, а на выход по координате z пройдет К импульсов, что соответствует заданному шагу. Основным преимуществом предлагаемого устройства по сравнению с известным яв.5 ляется то, что максимальньй нарезаемый шаг в известном устройстве не может быть больше, чем tО , где 8 - цена импульса, в предлагаемом устройстве шаг может быть значительно больше, так как на вхо интерполятора проходят не ийпульсы f, а импульсы блока 2 задания ско рости, при этом равномерность следования выходных импульсов достато но высока, так как их частота не случайна, а определенна по приведенной выше формуле. Поясним это примером. Пусть мы имеем датчик с числом отсчетов за один оборот 100 Цена импульса В - 0,001 .мм. Тогда максимальный шаг резьбы, которую можно нарезать с помощью известного устройства, составит 1000 X X 0,001 1 мм. Положим мы хотим нарезать резьбу с шагом 5 мм. Тогд используя предлагаемое устройство, мы должны запрограммировать (f 100 К 5000, если число оборотов шпин деля п 600 об/мин, то F ПК 600-5 3000 мм/мин. Примечание , формула справедлива при интерполяторе, выполненном по схеме с принудительны шагом по большей координате. В слу чае использования интерполятора с поочередным шагом формула примет вид п-К + ПК где К -,шаг, мм; .п - обороты, мин; ( - числоотсчетов датчика; код шага, заносимого в интерполятор ; тогда F 6000-5 6000- 3600 мм/мин. На фиг. 5 приведена временная кяаграынл работы устройства для слу чая, рассмотренного в примере, т.е. когда (f - 1000 Кд 5000 (шаг 5 мм 5 0,001 ММ| интерполятор с прину дительным шагом по большей координ те. Как видно из фиг. 5, в случае неправильного определения кода под . чи F, возможна ситуация, что следу щий импульс частоты (импульс нарис ван пунктиром) придет раньше, чем выработан импульс по координате х. 436 В этом случае произойдет искажение заданного шага (шаг будет меньше заданного), тогда импульс с выхода элемента И 15 пройдет через элемент И 17 (на фиг. 5 сигнал Сбой) и установит в 1 триггер 13. При этом включается индикаторный элемент. Кроме неправильного расчета кода подачи сигнал Сбой вьфабатывается и в случае большой девиации частоты ft, каторая возникает в результате биения в механической цепи шпиндель - датчик. Наличие ошибки в программировании и недопустимой девиации необходимо контролировать при холостом прогоне детали. Блокировку подачи с помощью сигнала Сбой производить не следует, так как в режиме резьбонарезания останов подачи может привести к поломке инструмента и браку детали, так что меньшей неправильностью будет брак детали из-за меньшего шага резьбы. Синхронизация в цепи маркера служит для того, чтобы резец попал в ту же нитку при последую1цих проточках, так как стоимость быстродействующего фазоимпульсного преобразователя превышает 500 руб. В то время, как стоимость дополнительных элементов сог-, ласно предлагаемого устройства не превьш1ает 15 руб. При годовой программе одного предприятия экономия составит 48500 руб. Для упрощения понимания изобретения и подтверждения воспроизводимости приведены в варианте принципиальная схема блоков 6 и 7 .синхронизации (фиг. 2), блока 2 задания скорости (фиг. 3), интерполятора 1 с принудительным шагом по большей координате (фиг. 4). Как видно из фиг. 2, в блоке синхронизации возможно первоначально сигналом предварительной установки (ПУ) триггер 30 непосредственно, а триггер 29 через элемент ИЛИ 28 сбросить в О. Командный импульс частоты f у или f „ поступает на С-вход триггера 29 и устанавливает его в 1. Потенциал с единичного выхода триггера 29 поступает на D-вход триггера 30. С приходом на вход С этого триггера переднего фронта синхронизирующей частоты f, который соответствует заднему фронту частоты f, триггер 30 переключается в состояние единицы. Поэтому следующий импульс частоты f пройдет через элемент И 31 на выход схемы синхронизации и одновременно через элемент ;ИЛИ 28 сбросит в О триггер 29. По переднему фронту следующего импу са частоты триггер 30 сбросится в как на его D-входе будет кулевой потенциал с выхода триггера 29. Следовательно на один синхронный импульс на С-входе триггера 29 схема формирует, равно один импульс, синхронный с частотой на выходе эле мента И 31, что и требуется от схем синхронизации. Блок 2 задания скорости (фиг. 3) работает следующим образом: в регистр 33 заносится код подачи F в прямом коде. На выходе мы должны пол чить частоту fjj, пропорциональную коду в мм/мин. Тогда каждый импульс на управляющем входе блока ключей 34 обеспечивает перезапись кода F с выхода регистра 35 в накапливающий сумматор 33, который осуществляет последовательное суммирование кодов Импульсы переполнения сумматора и я ляются выходными сигналами блока. Поясним это примером. Пусть Fmair 12000 мм/мин,что при цене импульса 5 0,001 мм соответствует частоте 200 кГц. Пусть период накапливающего сумматора 33 равен 20000. Тогда коду 12000 будет соответствовать коэффициент деления К 12000:20000. Тогда чтобы при коде F 12000 частота на выходе блока быпа равна 200 кГц, на его входе частота должна быть ° S - « Интерполятор работает по оценочной функции i-4- rZK-x;, где X к Д к координаты конечной точ ки интерполируемой прямой. При такой функции при F О надо делать шаг по оси х, при этом новое значение функции равно F; 1 3 При F О надо делать шаг по оси z, при этом новое значение функции i.j + .. Поскольку интерполятор, приведенный на фиг. 4, выполнен по схеме с принудительным шагом по большей координате, то в случае, например, после шага по х необходимо корректи- . ровать функцию на величину г„ после двойного шага по х и z необходимо корректировать функцию на величину X If Z|, Перед началом работы в регистр 45 в дополнительном коде заносится величина Z, а в регистр 35 в прямом В вычитающие коде величина х счетчики 48 и 47 заносятся соответстz . Сумматор 4 2 венно величины . сбрасывается с О Так как счетчики не в нулях, то нулевой сигнал с выхода элемента И 40. инвертируется элементом НЕ 36 и открывает элемент И 37. Импульсы частоты f начинают поступать с выхода элемента И 37 на входы, элементов и 39, на вход счетчика 48 и выход по координате х. Так как в первый момент F « О, то в соответствии с приведенйым выше алгоритмом, открывается элемент И 38 его входной сигнал открывает блок ключей 43 и в накапливающий сумматор 42 заносится дополнительный код z,, что зквивалеитно операции. Знак оценочной функции меняется, и с приходом следующего импульса он не только поступает на вход счетчика 48 и выход по координате х, но также через элемент И 39 поступает на вход счетчика 47, выходу интерполятора по оси z и вход блока ключей 44, при этом код Х)( - z,(3aнocиfc я в накапливающий сумматор 42, в результате чего оценочная функция вновь меняет знак. Так, в зависимости от знака оценочной функции, циклы будут, чередоваться до тех пор, пока оба счетчика 48 и 47 не окажутся в нуле и на выходе элемента И 40 не появится единичный сигнал, который через элемент НЕ 36 закроет элемент И 37.
Ъымд -
Фиг.З
| Устройство для программного управления намоточным станком | 1977 |
|
SU651316A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Головенков С.Н., ХЗирагин С.В | |||
| Основы автоматики и автоматического регулирования станков с программным управлением | |||
| М.: Машиностроение, 1980, с | |||
| Сепаратор-центрофуга с периодическим выпуском продуктов | 1922 |
|
SU128A1 |
| Устройство для программного управления станком | 1976 |
|
SU601665A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
