Изобретение относится к подъемно-транспортному оборудованию,, а именно к грузозахватным устройствам для разгрузки кип хлопка из железнодорожных вагонов с раздвижной крышей и штабелирования кип хлопка на складах текстильных предприятий.
Целью изобретения является расширение номенклатуры захватываемых мягких грузов.
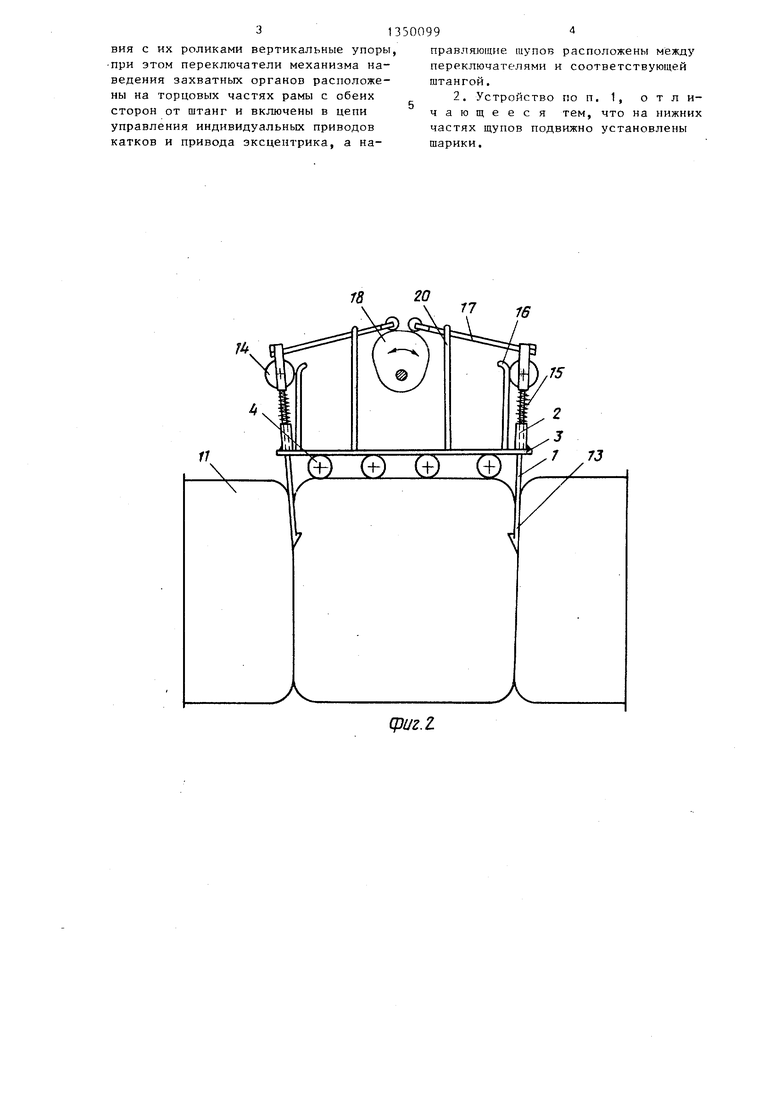
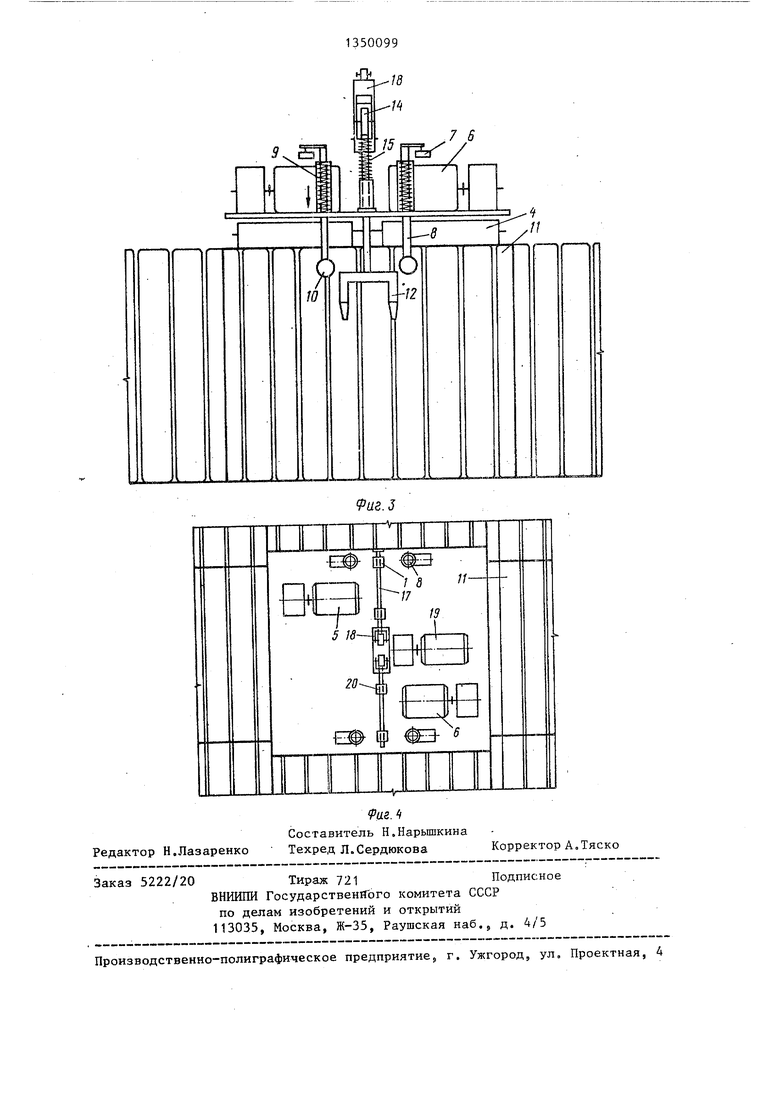
На фиг. 1 схематично изображено устройство, общий вид; на фиг,, 2 - то же, вид сбоку; на фиг 3 - то же вид спереди; на фиг. 4 - то же, вид сверху.
Грузозахватное устройство, преимущественно для разгрузки и штабелирования кип хлопка, содержит захватные органы в виде пары рычагов 1, пропущенных в качающихся направляющих 2 через раму 3, под которой смонтированы с возможностью вращения две группы катков 4, снабженных индивидуальными приводами 5 и 6, выключатели 7 которых кинематически связаны с выступами щупов 8, подпружиненных относительно платформы пружинами 9 и заканчивающихся вращающимися шариками 10 для захода меж,а;у кипами 11. Каждый из рычагов 1 снабжен снизу вильчатым захватом 12 с крючкообразно скошенными концами 13, а сверху - роликом 14, подпружиненным пружиной l5 и взаимодействующим с упором 16, рычаги 17 кинематически связаны с эксцентриком 18 привода 19 и шарнирно соединены со стойкой 20, жестко закрепленной на раме 3,
Предлагаемое устройство работает следующим образом.
Грузозахватное устройство, подвешенное на крюк электротали, подводят к уложеннь м кипам хлопка и опускают, при этом включаются приводы 5 и 6 индивидуальных электродвигателей, от которых приводятся группы катков 4, заставляя раму 3 перемещаться относительно кипы 11, пока шарик 10 щупа 8 не попадет меж,п,у кипами и пружиной 9 не опустится Б крайнее нижнее положение, при этом своим верхним выступом выключит выключател 7 одного из приводов электродвигателей, тем самым одна группа катков прекращает вращение, а вторая продолжает вращаться до тех пор, пока все остальные щупы 8 попадут в углубление между кипами и выключат своими
10
3500992
верхними выступами выключатели 7 приводов катков 4, после этого автоматически включается электродвигатель привода 19,, который, вращая эксцентрик 18, воздействует через рычаги 17 на рычаги 1, заставляя вильчатые захваты 12 углубляться между кипами в крайнее нижнее положение, при этом сжимается пружина 15, и ролик 14, вступая во взаимодействие с упором 16, поворачивает вильчатые захваты и надежно зажимает кипу с двух сторон, электродвигатель привода 19 выключается,и кипа хлопка транспортируется к месту штабелирования. После установки ее на место обратными действиями захватные элементы возвращаются в исходное положение и высвобождают кипу.
Формула изоб
15
20
р е т е н и я
5
0
5
0
5
0
5
1. Грузозахватное устройство, содержащее присоединяемую к крюку грузоподъемного механизма раму, установленные на ней приводные захватные органы с зажимными крюками, механизм передачи движения на захватные органы и механизм наведения последних на груз, включающий установленные в вертикальных направляющих подпружиненные щупы и переключатели для взаимодействия с верхними частями щупов, отличающееся тем, что, с целью расширения номенклатуры захватываемых мягких грузов, оно снабжено закрепленными в нижней части рамы с боковых ее сторон перпендикулярно им катками с независимыми приводами, установленными на раме с торцов на параллельных им осях вертикальными направляющими для захватных органов, выполненных в виде подпружиненных относительно направляющих штанг с зажимными крюками в нижних частях и роликами в верхних, а механизм передачи движения включает установленные на раме в центральной ее части на оси, параллельной торцам, приводной эксцентрик, жестко закрепленные на раме с обеих его сторон между штангами стойки, шарнирно закрепленные на их концах с возможностью взаимодействия одними плечами с эксцентриком двуплечие рычаги, другие плечи которых шарнирно связаны со свободными концами штанг,и установленные на раме между стойками и штангами с возможностью взаимодейст313500
ВИЯ с их роликами вертикальные упоры, при этом переключатели механизма наведения захватных органов расположены на торцовых частях рамы с обеих сторон от штанг и включены в цепи управления индивидуальных приводов катков и привода эксцентрика, а на
правляющие шупоБ расположены между переключателями и соответствующей штангой.
2. Устройство по п. 1, отличающееся тем, что на нижних частях щупов подвижно установлены шарики.
| название | год | авторы | номер документа |
|---|---|---|---|
| Грузозахватное устройство | 1990 |
|
SU1773847A1 |
| Грузозахватное устройство | 1990 |
|
SU1773255A3 |
| Грузозахватное устройство | 1980 |
|
SU996319A1 |
| Грузозахватная система | 1989 |
|
SU1768491A1 |
| УСТРОЙСТВО для ПЕРЕГРУЗКИ ШТУЧНЫХ ГРУЗОВ | 1968 |
|
SU213307A1 |
| Устройство для перемещения вагонных тележек | 1989 |
|
SU1794735A1 |
| АВТОСТРОП ДЛЯ ЗАХВАТА КОНТЕЙНЕРОВ | 2008 |
|
RU2387596C1 |
| Грузозахватное устройство | 1982 |
|
SU1066931A1 |
| Грузозахватное устройство | 1987 |
|
SU1491798A1 |
| Устройство для кантования грузов | 1989 |
|
SU1735191A1 |
Изобретение относится к области подъемно-транспортной техники, в частности к грузозахватным устройствам. Целью изобретения является расширение номенклатуры захватываемых мягких грузов. Грузозахватное устройство содержит раму 3. На раме 3 размещены направляющие 2, в которых размещены захватные органы с зажимными крюками 13 на нижних концах и роликом на верхних и подпружиненные щупы 8. В нижней части рамы 3 размещены катки 4 с независимыми приводами. Механизм передачи движения захватным органам включает в себя размещенный в центральной части рамы 3 приводной эксцентрик 18, жестко закрепленные на раме 3 с обеих его сторон стойки 20 с рычагами 17, взаимодействующими с эксцентриком 18 и связанными с захватными органами. 1 з.п. ф-лы, 4 ил. с @ W СП о о со 
W СТ G-J
Г8
20
7 /
yv
А.
(риг.2.
Редактор Н.Лазаренко
fus. 4
Составитель Н.Нарышкина Техред Л.Сердюкова
Заказ 5222/20Тираж 721Подписное
ВНИИПИ ГосударственЯого комитета СССР по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие,, г. Ужгород, ул. Проектная, 4
Корректор А.Тяско
