СО
С
| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор | 1984 |
|
SU1273243A1 |
| Манипулятор | 1986 |
|
SU1351782A1 |
| ОБЛИЦОВОЧНЫЙ МАНИПУЛЯТОР | 1990 |
|
RU2023582C1 |
| Манипулятор | 1988 |
|
SU1636204A1 |
| Манипулятор | 1983 |
|
SU1151453A1 |
| ДВИГАТЕЛЬ ВНУТРЕННЕГО СГОРАНИЯ | 1990 |
|
RU2013606C1 |
| Манипулятор для замены погружного стакана на слябовой машине непрерывного литья заготовок | 2016 |
|
RU2639089C2 |
| РЫЧАЖНАЯ ИНВАЛИДНАЯ КОЛЯСКА (ВАРИАНТЫ) | 2009 |
|
RU2387434C1 |
| ПРЕОБРАЗОВАТЕЛЬ ДВИЖЕНИЯ | 2009 |
|
RU2386066C1 |
| Манипулирующее устройство | 1982 |
|
SU1093537A1 |
Изобретение относится к робототехнике и может быть использовано в промышленных роботах различного назначения, манипуляторы которых включают шарнирно сочлененные звенья. Целью изобретения является повышение точности позиционирования за счет использования жестких связей. Манипулятор состоит из основания 1, исполнительного органа в виде шарнирно- соединенных звеньев 2, кисти 3 со схватом 4 и привода изменения относительного положения звеньев. Привод изменения относительного положения звеньев включает два гидроцмлиндра 5 и кинематическую цепь в виде разветвленной на две параллельные ветви передачи, включающие конические зубчатые колеса, жестко связанные со звеньями 2, и блоки. Каждый блок состоит из двух конических зубчатых колес, соосно которым закреплены рычаги, шарнирно связанные шатуном, причем коническое зубчатое колесо одной из параллельных ветвей передачи установлено жестко на корпусе звена, а коническое колесо другой ветви передач установлено на корпусе с возможностью вращения. 8 ил.
Изобретение относится к робототехнике и может быть использовано в промышленных роботах различного .назначения, манипуляторы которых включают шарнирно сочлененные звенья.
Целью изобретения-является повышение точности позиционирования за счет использования жестких связей.
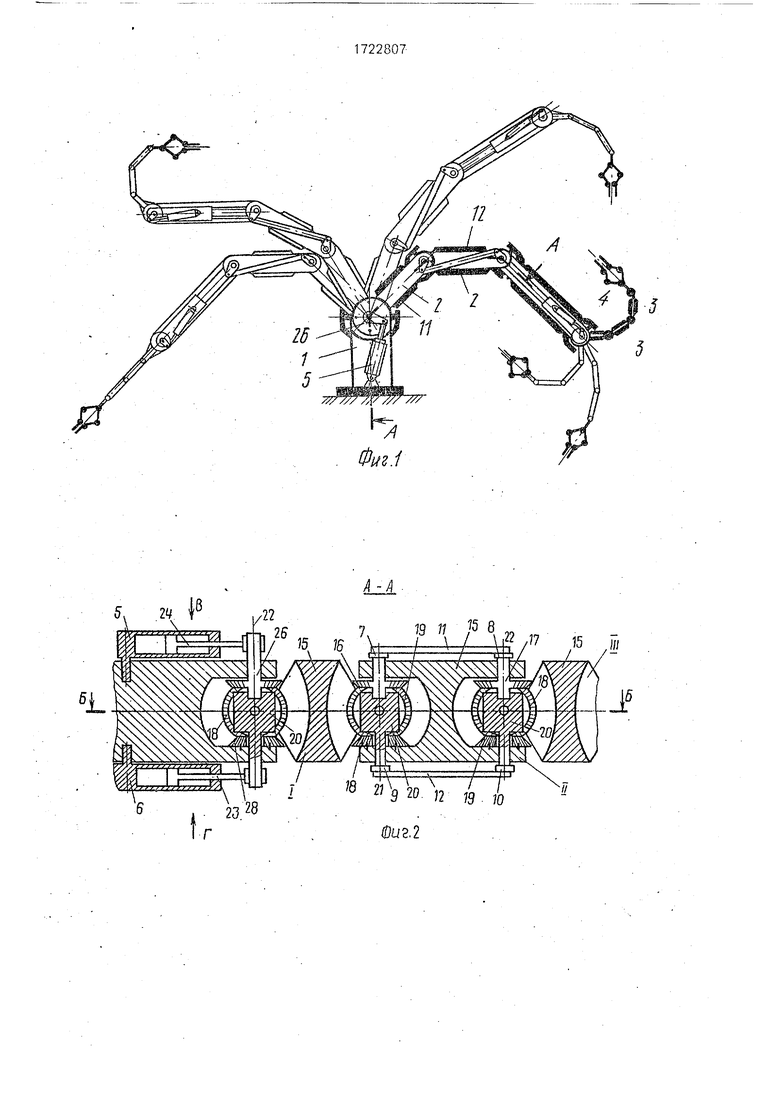
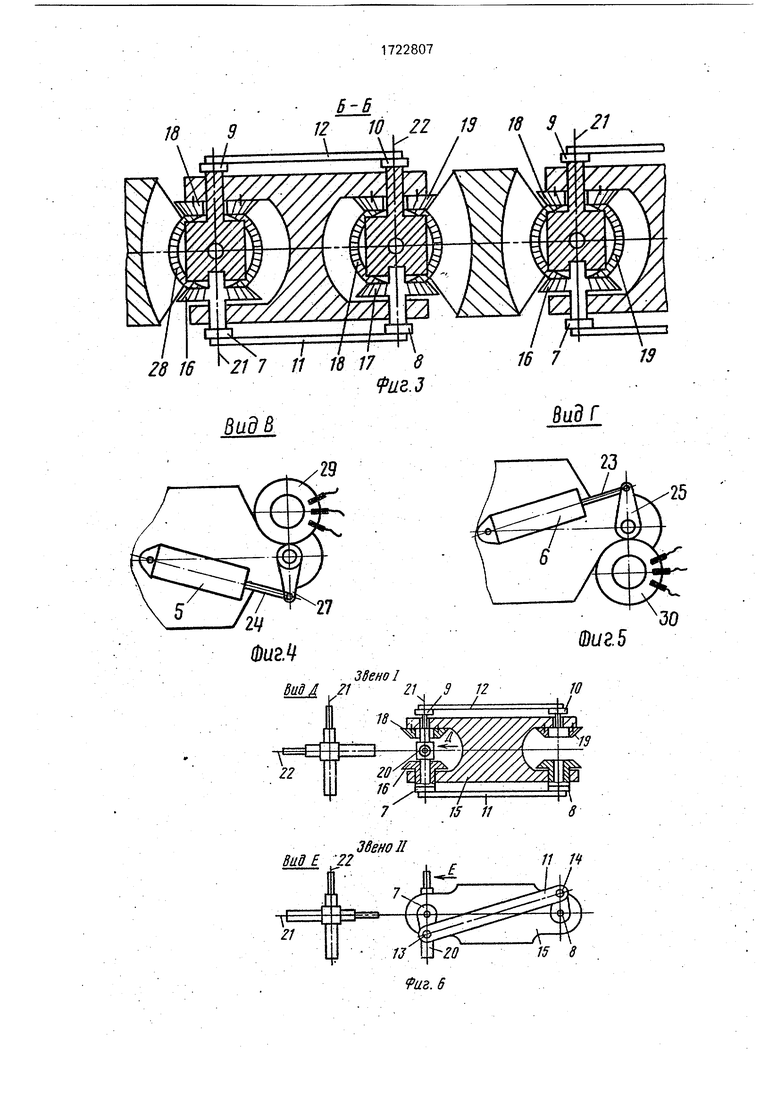
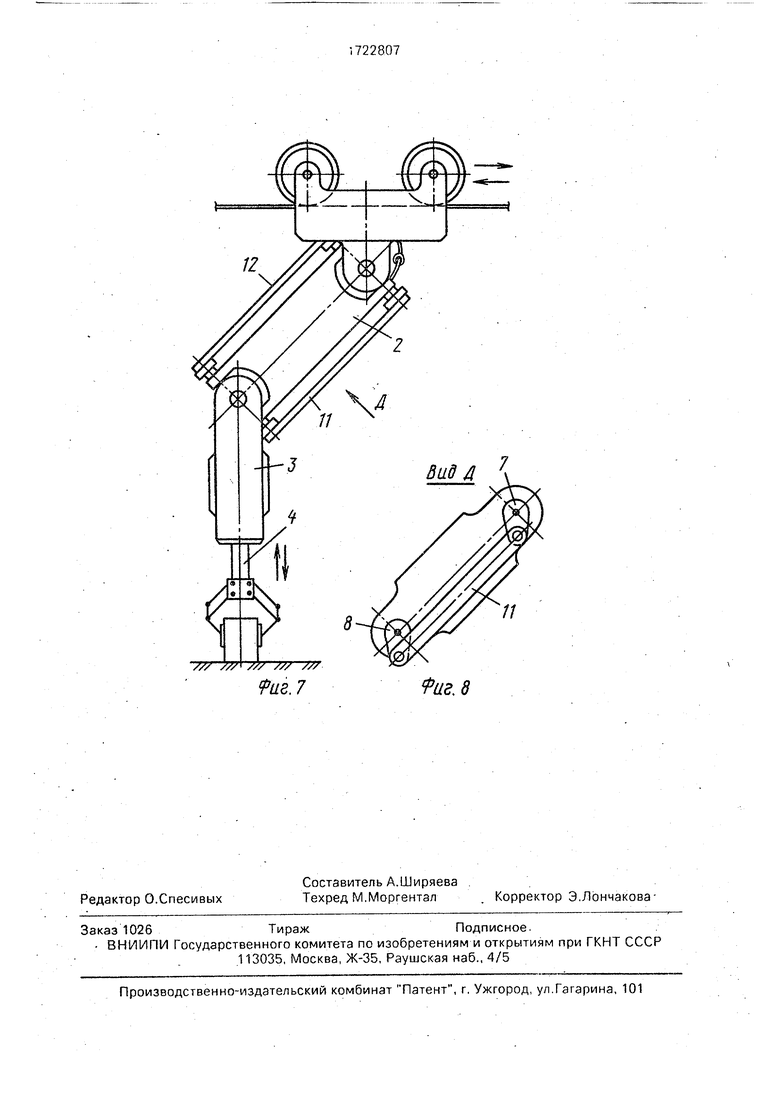
На фиг, 1 показан манипулятор, общий вид; на фиг. 2 - разрез А-А на фиг. 1; на фиг; 3 - разрез Б-Б на фиг. 2; на фиг. 4 - вид В на фиг. 2; на фиг. 5 - вид Г на фиг. 2; на фиг. 6 - взаимное расположение двух унифицированных звеньев; на фиг. 7 - вариант исполнения манипулятора; на фиг. 8 - вид D на фиг. 7.
Манипулятор содержит основание 1, на котором установлены исполнительный орган и привод изменения относительного положения звеньев.
Исполнительный орган состоит из шарнирно соединенных между собой звеньев 2 и кисти 3 со схватом 4, также составленной из шарнирно соединенных звеньев того же размера или другого типоразмера, причем первое звено 2 исполнительного органа связано с основанием 1 посредством шарнира, а последнее - с кистью 3, которая установлена с возможностью продольного перемещения.
Привод изменения относительного положения состоит из двух гидроцилиндров 5 и 6, шарнирно установленных на основании 1 и кинематической цепи в виде двух параллельных ветвей передач.
Две ветви кинематической передачи каждого звена 2 состоят из двух рычагов 7 и 8 (9 и 10), взаимно соединенных посредством шатунов 11 и 12 и образующих жесткие передачи. Каждый конец шатуна 11 и 12
ч
10 ГО
оо
о
соединен с рычагом шарнирно посредством осей 13 и 14 (фиг. 6). Если шатуны закреплены по диагонали к звену (фиг. 6), то рычаги поворачиваются в разные стороны, т.е. передача выполнена с отрицательным передаточным отношением, если шатуны закреплены параллельно звену (фиг. 7,8), то рычаги поворачиваются в одну сторону, т.е.
передача выполнена с положительным передаточным отношением.
Соосно рычагам 7 и 8 первой кинематической передачи на корпусе 15 устанволены с возможностью вращения конические зубчатые колеса 16 и 17, жестко соединенные с рычагами 7 и 8 и образующие с ними блоки. Соосно рычагам 9 и 1.0 второй кинематиче- скрй передачи на корпусе 15 неподвижно закреплены конические зубчатые колеса 18 и 19.
Каждое звено 2 снабжено крестовиной 20 с осями 21, 22. Ось 21 крестовины 20 своими концами связана с осями рычагов 7 и 9, причем с рычагом 9 - жестко, а с рычагом 7 - с возможностью вращения. Концы оси 22 крестовины 20 первого звена 2 (фиг. 2) соединены со штоками 23 и 24 гидроцилиндров 5 и 6, причем первый шток 23 соединен с концом оси 22 крестовины 20 непосредственно через рычаг 25. Рычаг 25 закреплен на крестовине 20 жестко, а на штоке 23 - шарнирно (фиг, 2, 5). На втором конце оси 22 установлено коническое зубчатое колесо 26, ось которого соединена со штоком 24 через рычаг 27. Рычаг 27 соединен со штоком 24 шарнирно, а с осью конического зубчатого колеса 26 - жестко (фиг. 2,4). Коническое зубчатое колесо 26 связано зацеплением с неподвижным коническим зубчатым колесом 18. Коническое зубчатое колесо 18 соединено с коническим зубчатым колесом 28, установленным сооснр с осью 22 крестовины, и неподвижно закреплено на основании 1.
Звенья сочленены между собой с разворотом относительно продольной оси Б-Б на 909. Крестовина 20 последующего звена со- единена с предыдущим звеном таким образом, что ее свободная ось 22 соосна осям рычагов 8 и 10 предыдущего звена, причем с рычагом 10 - неподвижно, а с рычагом 8 с возможностью вращения. Подвижное коническое колесо 16 последующего звена зацеплено с неподвижным коническим колесом 19 предыдущего звена. Подвижное коническое колесо 17 предыдущего звена зацеплено с первым коническим колесом 18 последующего звена.
Последующие звенья соединены аналогично (фиг. 6).
Датчики 29,30 положения звеньев установлены на основании 1 и соединены с рычагами 25 и 27.
Манипулятор работает следующим образом.
При повороте звеньев 2 в заданное положение, например в плоскости чертежа - вверх (фиг, 2), в гидроцилиндр 5 подается рабочая жидкость под давлением, Шток 24
гидроцилиндра 5 выдвигается и поворачивает рычаг 27 и коническое колесо 26 по часовой стрелке (если смотреть по стрелке В), так как они жестко соединены. Коническое колесо 26 поворачивает коническое колесо 18 против часовой стрелки. Поскольку коническое колесо 18 жестко соединено с корпусом 15 первого звена 2, то оно поворачивается относительно основания 1 вокруг оси 21 вверх. При повороте первого звена
движение через шатун 12 передается на рычаг 10, так как рычаг 9 соединен с крестовиной 20 и остается неподвижным относительно основания 1. Рычаг 10 поворачивается против часовой стрелки. Рычаг 10
жестко соединен с крестовиной 20 второго
звена 2, поэтому крестовина 20 этого звена
поворачивается относительно первого звена против часовой стрелки, Крестовина 20
поворачивает указанное звено относительно первого звена вверх вокруг оси 22.
При повороте второго звена относительно первого вверх коническое колесо 16 второго звена, находящееся в зацеплении с коническим колесом 19 первого звена, начинает поворачиваться (обкатываться) по коническому колесу 19 против часовой стрелки благодаря тому, что коническое колесо 19 неподвижно соединено с первым звеном. Соответственно поворачивается
против часовой стрелки и рычаг 7 второго звена, который жестко соединен с.коническим колесом 16.
Далее движение передается через шатун 11 второго звена на рычаг 8. Рычаг 8
второго звена вместе с коническим колесом 17 (они жестко соединены) поворачивается по часовой стрелке относительно этого звена вокруг оси 22. Коническое колесо 17 этого звена находится в зацеплении с коническим
колесом 18 следующего, третьего, звена и поворачивает его против часовой стрелки, так как коническое колесо 18 жестко соединено с третьим звеном, то это звено повора- чивается относительно второго звена
вверх, оси 2-1.
На следующие звенья движение передается аналогично. Таким образом последнее подвижное звено манипулятора повернется относительно неподвижного
звена на угол, равный сумме углов поворота каждогр подвижного звена.
Поворот звеньев в заданноё положение (в плоскости чертежа - вниз) осуществляется аналогично, меняется только направление вращения.
При повороте звеньев в заданное положение в плоскости, перпендикулярной плоскости чертежа (вверх), манипулятор работает следующим образом.
В гидроцилиндр 6 подается рабочая жидкость под давлением, шток 23 гидроцилиндра 6 втягивается и поворачивает рычаг 25 и крестовину 20 первого звена 2 против часовой стрелки (если смотреть по стрелке В), так как они жестко соединены. Крестовина 20 поворачивает первое звено относительно основания 1 вокруг оси 22 вверх в плоскости, перпендикулярной плоскости чертежа. Так как звено 2 поворачивается относительно основания 1 вокруг оси 22, то коническое колесо 16 звена 2 поворачивается (обкатывается) относительно основания 1 против часовой стрелки благодаря тому, что, коническое колесо 16 находится в зацеплении с коническим колесом 28, которое неподвижно .закреплено на основании 1. Рычаг 7 звена 2 также поворачивается против часовой стрелки, так как рычаг 7 жестко соединен с коническим колесом 16.
Движение через шатун .11 звена 2 передается на рычаг 8, который вместе с коническим колесом 17 поворачивается по часовой стрелке (рычаг 8 и коническое колесо 17 соединены жестко). Коническое колесо 17 звена 2 находится в зацеплении с коническим колесом 18 второго звена 2 и поворачивает его против часовой стрелки (по стрелке В). Так как зубчатое колесо 18 неподвижно соединено с вторым звеном 2, to это звено 2 поворачивается относительно первого звена 2 вокруг оси 21 вверх в плоскости, перпендикулярной плоскости чертежа (фиг. 2).. -
Так как второе звено 2 поворачивается относительно первого звена 2 вокруг оси 21 вверх, то движение через шатун 12 второго звена 2 передается на рычаг 10, так как рычаг 9 жестко соединен с крестовиной 20 и остается неподвижным относительно первого звена 2. Рычаг 10 вместе с крестовиной 20 третьего звена 2 {рычаг 10 и крестовина 20 соединены жестко) поворачивается против часовой стрелки. Крестовина 20 третьего звена 2 поворачивает третье звено относительно второго звена вверх вокруг оси 22 в плоскости, перпендикулярной плоскости чертежа..
На следующие звенья 2 движение передается аналогично. Таким образом последнее звено 2 манипулятора повернется относительно неподвижного звена на угол, 5 равный сумме углов поворота каждого подвижного звена.
Поворот звеньев в заданное положение в плоскости, перпендикулярной плоскости чертежа, вниз осуществляется аналогично, 0 меняется только направление вращения.
При необходимости поворота последнего звена в плоскости, размещенной к плоскости чертежа под углом, не равным 90 °, штоки 23 и 24 приводов выдвигаются или 5 втягиваются одновременно. При этом подвижные звенья одновременно поворачиваются вокруг своих шарнирных осей 21 и 22.
Датчики 29 и 30 положения звеньев со- 0 единены с рычагами 27 и 25 и снимают ин- формацию о положении звеньев манипулятора. При повороте звеньев на заданный угол сигнал с датчиков поступает в систему управления роботом. Система уп- 5 равления подает сигнал на приводы и они останавливаются,
На фиг. 7 изображен вариант манипулятора с креплением жестких элементов, при котором рычаги поворачиваются воднусто- 0 рану. В этом случае конфигурация руки при работе иная, чем в указанном варианте.
Формула изобретения Манипулятор, содержащий шарнирно
5 соединенные между собой звенья и кинематическую цепь привода изменения относительно положения звеньев в виде разветвленной на две параллельные ветви передачи, включающие в себя блоки с кони0 ческими зубчатыми колесами и конические зубчатые колеса, жестко связанные каждое с соответствующим звеном и входящие в зацепление с коническим зубчатым колесом соответствующего блока, оси блоков совпа-
5 дают с осями шарнирного соединения звеньев между собой, отличающийся тем, что, с целью повышения точности позиционирования за счет использования жестких связей, блоки снабжены .рычагами,
0 установленными соосно с коническими зубчатыми колесами блоков и жестко связанными с последними, а каждая пара рычагов шарнирно соединена между собой дополнительно введенными шатунами, причем
5 оси, связывающие рычаги с шатунами, расположены параллельно оси конического зубчатого колеса блока.
Bad В
Фиг.З
Вид Г
Риг.б
/// 7/7 7/7 /7/ /77
Фи.г.7
Риг. в
| Манипулятор | 1986 |
|
SU1351782A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
