(Л
Йь
4
сл
со 1
Изобретение относится к станкостроению, в частности к робототехническим устройствам.
Цель изобретения - повышение надежности работы за счет введения в кинемати- ческую цепь жестких звеньев.
На фиг. 1 показан робот, общий вид; на фиг. 2 - то же, йид слева; на фиг. 3 - разрез А-А на фиг. 2; на фиг. 4 - вид Б на фиг. 3; на фиг. 5 - схема распределения сил в механизме уравновешивания при одном положении исполнительного органа; на фиг. 6 - то же, при втором положении исполнительного органа; на фиг. 1 - то же, при третьем положении исполнительного органа; на фиг. 8 - то же, при четвертом положении исполнительного органа.
Промышленный робот (фиг. I) имеет основание 1, на котором смонтирован исполнительный орган (манипулятор), состояший из шарнирно соединенных звеньев - плеча 2, предплечья 3, приводы (показан один при- вод 4 плеча 2), механизм 5 уравновешивания и систему управления (не показана). Предплечье 3 уравновешено.
Привод 4 закреплен на основании 1 (фиг. 2) и имеет приводную шестерню 6 (фиг. 4), которая приводится в зацепление с зубчатым колесом 7, закрепленным жестко на плече соосно с осью качания плеча. Привод позволяет врашать плечо на любой угол как в одну, так и в другую сторону. Плечо 2 установлено на основании 1 шарнирно с воз- можностью кругового врашения относительно оси О.
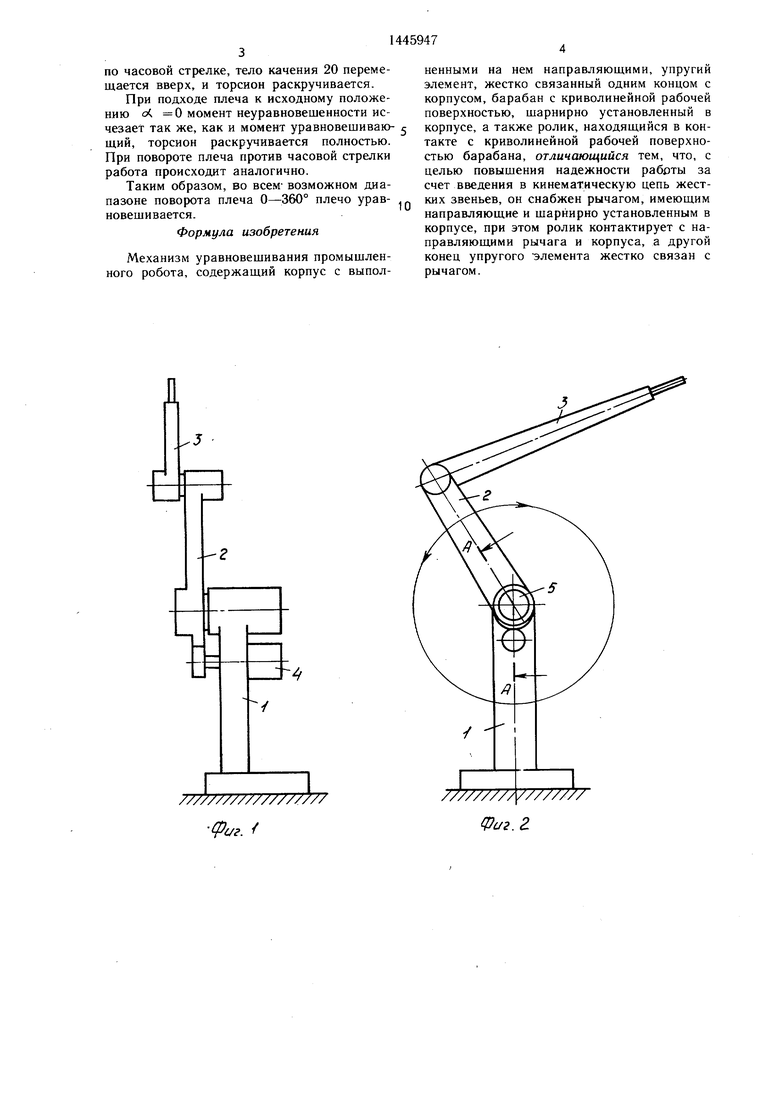
Механизм уравновешивания (фиг. 3) содержит корпус 8, жестко закрепленный па плече 2, втулку 9, жестко закрепленную в основании 1 при помоши шпонок 10, торсион, выполненный составным из нескольких кон- центрично установленных полых торсионов 11 -13, соединенных один с другим последовательно.
Торсион расположен внутри втулки 9 кон- центрично оси О. Один конец наружного тор- сиона 11 закреплен неподвижно с втулкой 9, а второй установлен свободно с возможностью врашения в подшипниках и соединен неподвижно, например, при помощи шлице- вого соединения с одним из концов следующего торсиона 12, расположенного концент- рично внутри торсиона 11. Другой конец торсиона 12 расположен с возможностью свободного вращения в торсионе 11 и жестко связан с одним из концов следующего тор- сиона 13. Второй конец торсиона 13 расположен с возможностью вращения во втулке 9. На этом конце торсиона жестко, например, при помощи щлицевого соединения 14 установлен рычаг 15, который имеет опорную поверхность 16 (фиг. 4). Корпус втулки 9 выполпен с вилкой 17 (фиг. 3 и 4) как единое целое. Вилка 17 имеет опорные поверхности 18 (фиг. 4). Рычаг 15 расположен меж0
5
0
0
0 0 5
ду ножками вилки 17. Корпус 8 имеет опорные поверхности 19 (фиг. 3 и 4).
Между опорными поверхностями 16, 18 и 19 размещено тело 20 качения (ролик), которое находится с ними в постоянном контакте. Для исключения возникновения трения скольжения между телом качения и опорными поверхностями установлены подшипники качения.
Механизм работает следующим образом.
При вертикальном положении плеча тор- сионы не закручены, зазоры между телом 20 и поверхностями 16, 18 и 19 выбраны. При. отклонении плеча 2 от вертикального положения, например, по часовой стрелке на некоторый угол - 90° (фиг. 5) происходит следующее. Опорная поверхность 19 корпуса 8 заставляет перемещаться тело 20 качения вниз, при этом тело качения, опираясь на неподвижные поверхности 18, взаимодействует на поверхность 16 рычага 15. Так как рычаг 15 жестко установлен на одном конце торсиона, а второй конец торсиона жестко соединен с втулкой 9, то торсион закручивается на угол сЛ .
На плечо 2 в положении (фиг. 5) действует момент неуравновешенности относительно оси О, равный весу звеньев Р, умноженный на плечо Н, направленный по часовой стрелке. Со стороны рычага 15 за счет закрутки торсиона на тело 20 качения по нор Мали к поверхности 16 действует сила Ц. Со стороны поверхностей 18 неподвижной вилки 17 на тело 20 действует реакция Ij . Возникает результирующая сила РЗ, стремящаяся переместить тело 20 вверх. В результате контакта тела 20 с опорными поверхностями 19 корпуса 8 возникает сила Е, действующая по нормали к поверхности 19. Таким образом, на плечо действует сила FI, которая создает уравновешивающий момент Ц xh, направленный против часовой стрелки. При отклонении плеча на угол j5 90 (фиг. 6) момент неуравновешенности от веса звеньев максимальный. При дальнейшем отклонении плеча на угол 90-180° момент неуравновешенности уменьшается от максимального до 0.
Конфигурация поверхностей 16, 18 и 19 выполнена такой, что при отклонении плеча на О-180° тело качения перемещается вниз и закручивает торсион. В нижнем положении плеча 2 ( 180°, фиг. 7) торсион закручен на максимальный угол сК и сила F максимальна, однако плечо уменьшается - до О, поэтому со стороны торсиона на плечо не действует уравновешивающий момент, так же как и нет в этом положении момента неуравновешенности. При дальнейшем перемещении плеча по часовой стрелке (фиг. 8) появляется момент неуравновешенности (РхН), действующий против часовой стрелки, но также возникает и уравновешивающий момент (), который действует
по часовой стрелке, тело качения 20 перемещается вверх, и торсион раскручивается.
При подходе плеча к исходному положению оС 0 момент неуравновешенности исчезает так же, как и момент уравновешиваю щий, торсион раскручивается полностью. При повороте плеча против часовой стрелки работа происходит аналогично.
Таким образом, во всем- возможном диапазоне поворота плеча плечо уравновешивается.
Формула изобретения
Механизм уравновешивания промышленного робота, содержаший корпус с выпол
ненными на нем направляющими, упругий элемент, жестко связанный одним концом с корпусом, барабан с криволинейной рабочей поверхностью, шарнирно установленный в корпусе, а также ролик, находящийся в контакте с криволинейной рабочей поверхностью барабана, отличающийся тем, что, с целью повышения надежности рабрты за счет введения в кинематическую цепь жестких звеньев, он снабжен рычагом, имеющим направляющие и шарнирно установленным в корпусе, при этом ролик контактирует с направляющими рычага и корпуса, а другой конец упругого элемента жестко связан с рычагом.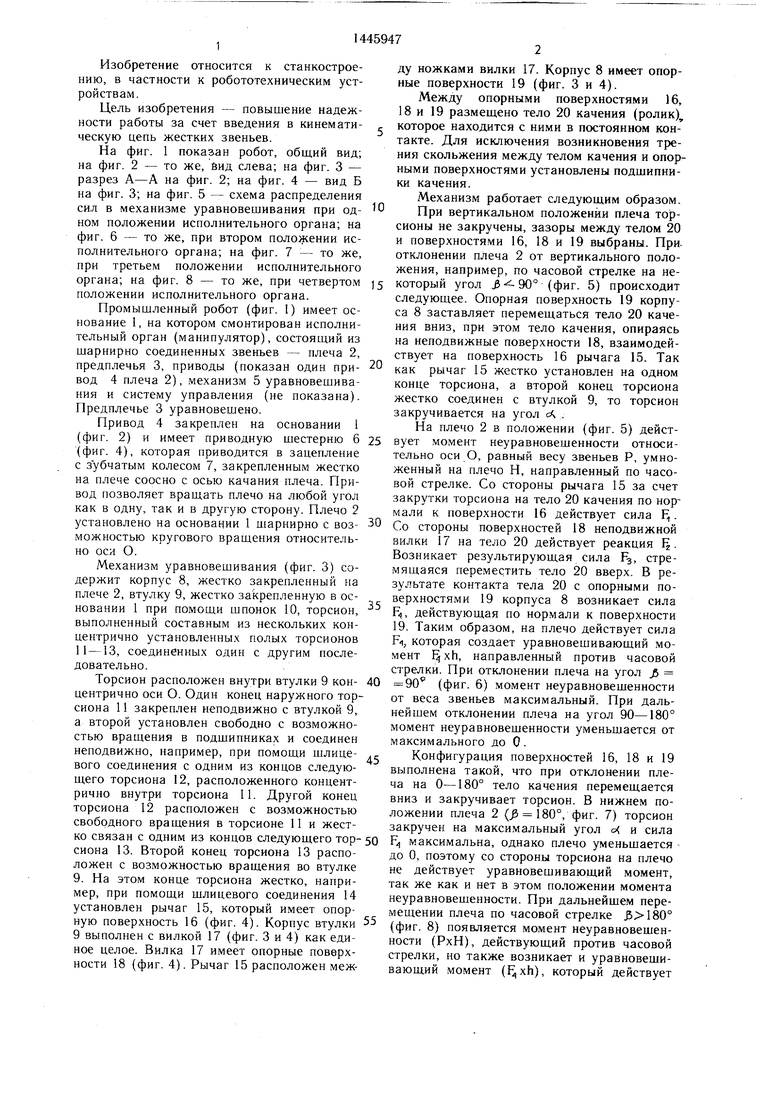
| название | год | авторы | номер документа |
|---|---|---|---|
| Промышленный робот | 1980 |
|
SU931463A1 |
| Уравновешивающий механизм откидывающейся кабины автомобиля | 1983 |
|
SU1137005A2 |
| БОЕВОЙ МЕХАНИЗМ ТКАЦКОГО СТАНКА | 1990 |
|
RU2011706C1 |
| УРАВНОВЕШЕННЫЙ МЕХАНИЗМ КАЧАНИЯ | 1996 |
|
RU2093731C1 |
| ТРАНСПОРТНОЕ СРЕДСТВО ВЫСОКОЙ ПРОХОДИМОСТИ | 2013 |
|
RU2554900C2 |
| ПОДЪЕМНИК ДЛЯ ПОГРУЖЕНИЯ ИНВАЛИДА В БАССЕЙН | 1993 |
|
RU2063376C1 |
| ЗУБЧАТО - ИМПУЛЬСНЫЙ ВАРИАТОР | 2016 |
|
RU2636440C2 |
| УРАВНОВЕШЕННЫЙ МЕХАНИЗМ КАЧАНИЯ | 2001 |
|
RU2200260C2 |
| Манипулятор | 1986 |
|
SU1351782A1 |
| РОЛИКОВЫЕ КОНЬКИ (ВАРИАНТЫ) | 2005 |
|
RU2295992C2 |


Изобретение относится к станкостроению, в частности к робототехническим устройствам. Цель изобретения - повышение надежности работы за счет введения в кинематическую цепь жестких звеньев. При движении уравновешиваемого звена 2 связанный с ними криволинейный барабан 8 поворачивается относительно неподвижных направляющих 17 корпуса 7. При этом находящийся в контакте с рабочей поверхностью барабана ролик 20 смещается в радиальном направлении относительно продольной оси О устройства и, воздействуя на направляющие рычаги 15, закручивает составной торсион. 8 ил.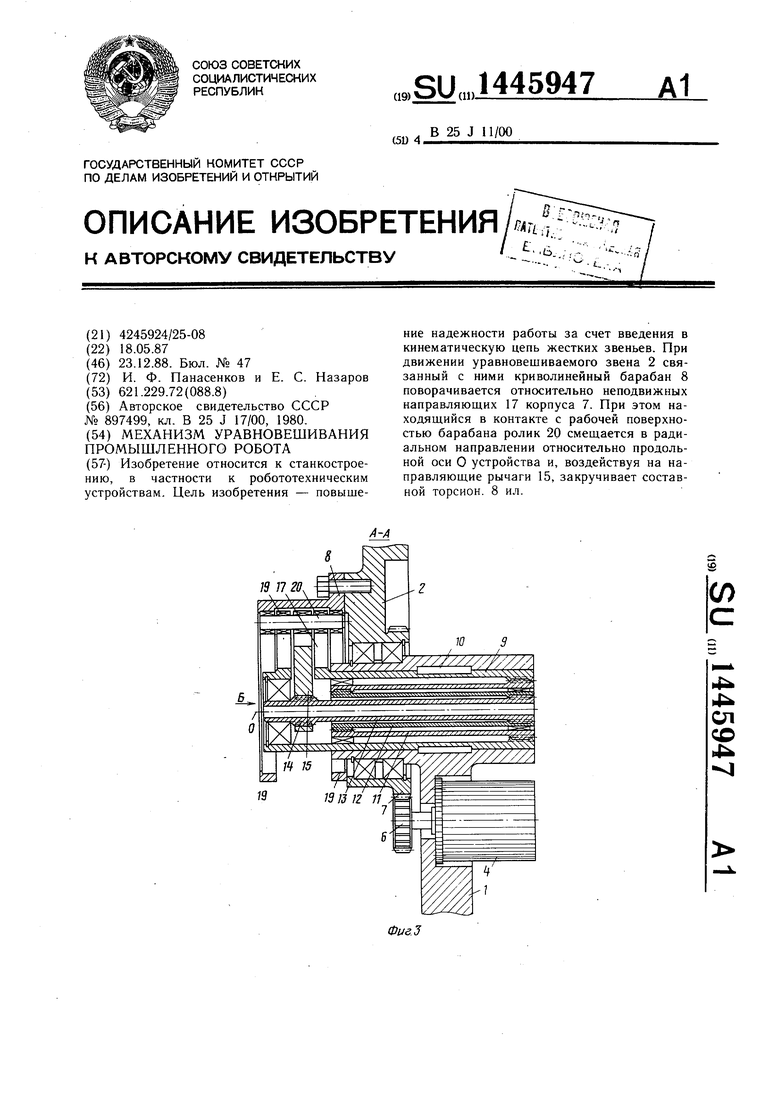
. /
J
/////////yV/7//// с/г.г
90°
20
ФиеЛ
180
Фиг.7
| Устройство вертикального перемещения | 1980 |
|
SU897499A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
