4::
to
ГчЭ
О5
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ управления гидродомкратами горных машин | 1986 |
|
SU1352053A1 |
| Устройство для определения разности частотных сигналов | 1975 |
|
SU610127A1 |
| Частотноуправляемый электропривод переменного тока | 1982 |
|
SU1086536A1 |
| Интегрирующее устройство (его варианты) | 1982 |
|
SU1233147A1 |
| СПОСОБ ГЕОЭЛЕКТРОРАЗВЕДКИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1991 |
|
RU2006886C1 |
| Способ аналого-цифрового преобразования и устройство для его осуществления | 1986 |
|
SU1473083A1 |
| Способ контроля расхода рабочей жидкости в гидроприводах горных машин и устройство для его осуществления | 1986 |
|
SU1416690A1 |
| Система автоматического управления очистным комбайном в профиле пласта | 1985 |
|
SU1270321A1 |
| Устройство для приема биполярных многоуровневых сигналов | 1986 |
|
SU1390802A2 |
| Устройство для отображения векторов на экране электронно-лучевой трубки | 1985 |
|
SU1304014A1 |
Изобретение отйосится к автоматическому управлению гидродомкратами (ГД) перемещения режущих органов горных ма- щин. Цель - повыщеиие точности управления путем компенсации нестабильности действующего на щток ГД усилия. Способ основан на определении объема рабочей жидкости в каждый момент времени /,, который будет заключен в ГД за время запаздывания А/ при отключении гидрораспределителя в момент времени /,. Измеренный объем жидкости суммируют с объемом, закаченным в ГД до момента времени ti. Полученную сумму сравнивают с заданным объемом и при их равенстве прекращают подачу рабочей жидкости в ГД. Затем измеряют и запоминают время запаздывания А/ гидрораспределнтеля при его отключении на каждом срабатывании. 4 ил. § (Л
INJ
10
Изобретение относится к автоматическому управлению гидродомкратами перемещения режущих органов горных мащин и является усовершенствованием устройства по авт. св. № 1352053.
Целью изобретения является повышение точности управления путем компенсации нестабильности действующего на шток гидродомкрата усилия.
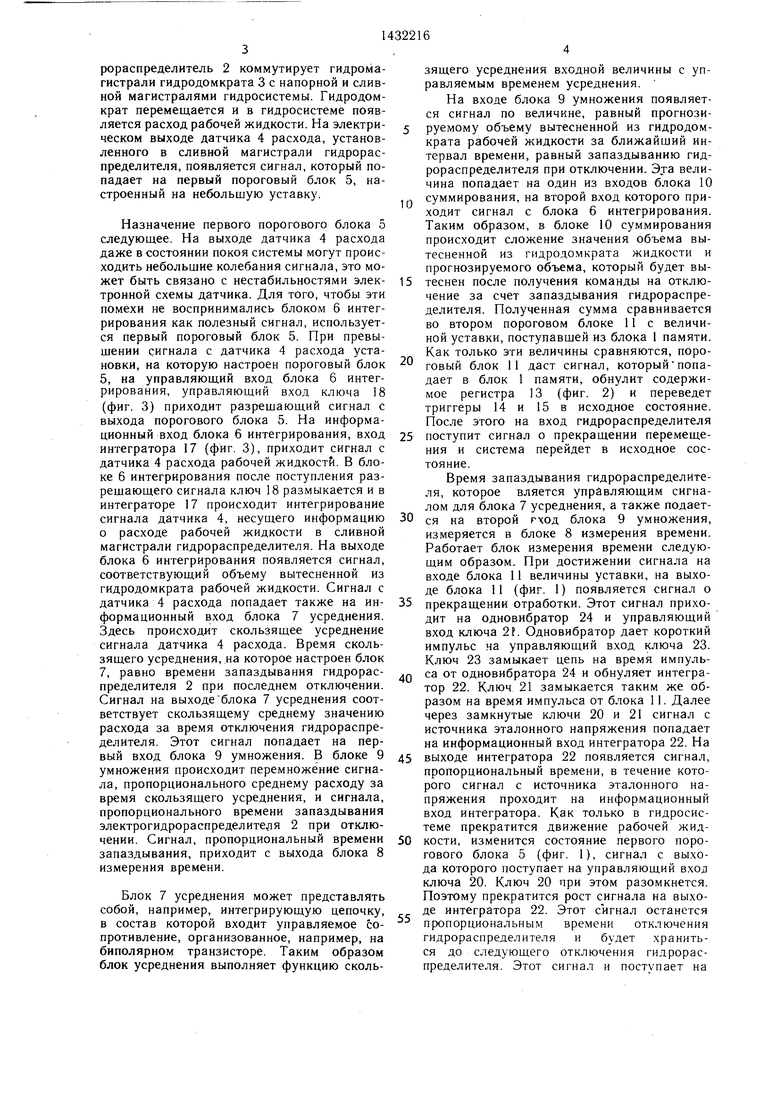
На фиг. 1 изображена функциональная схема системы управления гидродомкратами перемещения режущих органов горной машины; на фиг. 2 - функциональная схема блока памяти; на фиг. 3 - функциональная схема блока интегрирования; на фиг. 4 - функциональная схема блока измерения вре- мени.
Согласно способу управления гидродомкратами режущих органов горных машин, заключающемуся в определении объема рабочей жидкости в каждый момент времени ti, который заключается в гидродом- 20 крат за данное время запаздывания Д/ при отключении гидрораспределителя в момент времени /,-, суммировании этого измеренного объема жидкости с объемом, закаченным в гидродомкрат до момента времени /,-, сравнении полученной суммы с заданным объемом и при их равенстве прекращении подачи рабочей жидкости в гидродомкрат, измеряют и запоминают время запаздывания А/ гидрораспределителя при его отключении на каждом срабатывании.Система управления гидродомкратами перемещения режущих органов горной машины состоит из следующих блоков (фиг. 1). Блок 1 памяти связан своими первым и вторым выходами с электрическими входами
25
30
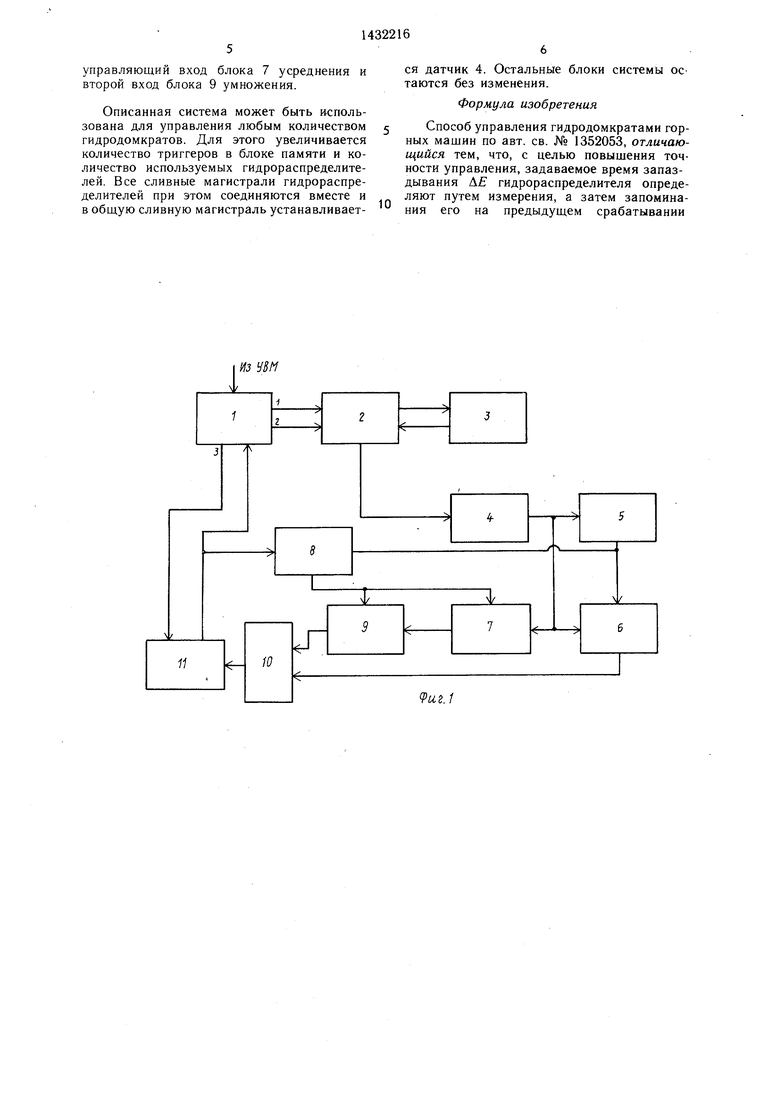
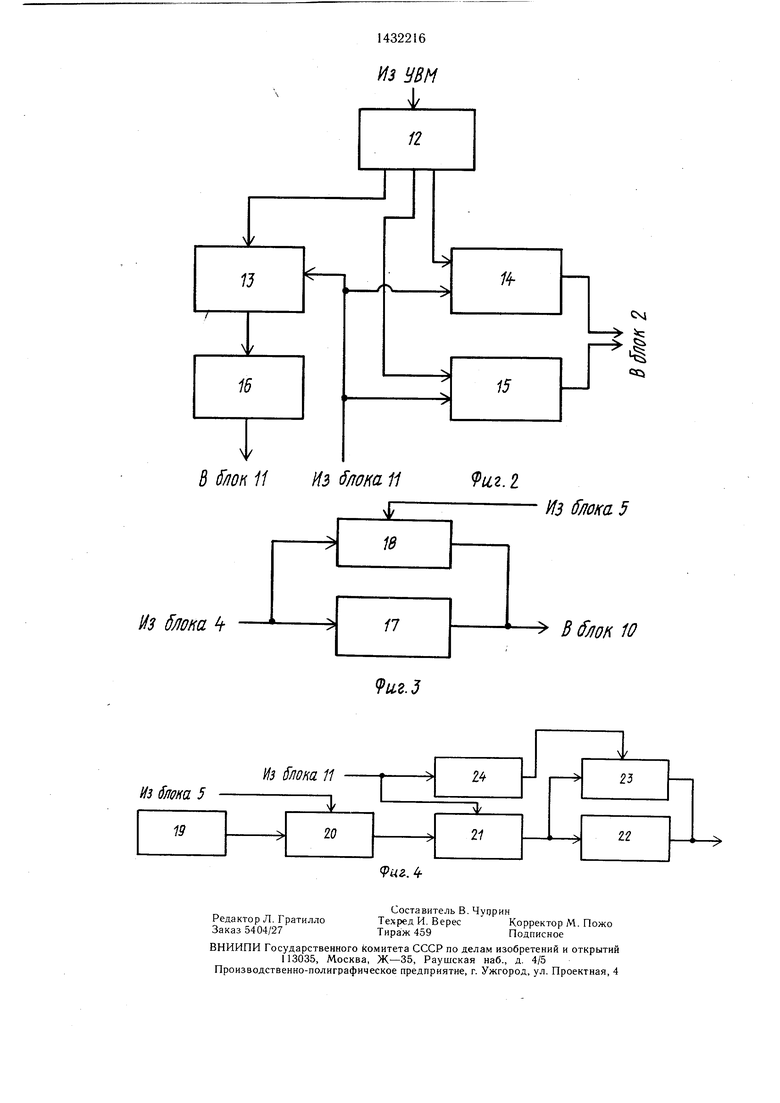
и с управляющим входом блока 8 измерения времени. В состав блока 1 памяти (фиг. 2) входит дешифратор 12, выходы которого соединены с входом регистра 13 и входами триггеров 14 и 15. Выходы триггеров 14 и 15 являются соответственно первым и вторым выходами блока 1 памяти и поступают на входы блока 2. Выход регистра 13 соединен с входом цифроаналогово- го преобразователя 16, выход которого является третьим выходом блока 1 памяти и соединен с управляющим входом блока 11. Вторые входы регистра 13 и триггеров 14 и 15 являются вторым входом блока 1 памяти и соединены с выходом второго порогового блока 11 (фиг. 1). Блок 6 интегрирования (фиг. 3) состоит из собственного интегратора 17 и ключа 18, информационный вход и выход которого соединены соответственно с входом и выходом интегратора 17, а управляющий вход соединен с выходом первого порогового блока 5 (фиг. 1).
Блок 8 измерения времени может быть организован, например, следующим образом (фиг. 4). При этом выход источника 19 эталонного напряжения соединен с информационным входом ключа 20, управляющий вход которого соединен с первым пороговым блоком 5 (фиг. 1). Выход ключа 20 соединен с информационным входом ключа 21, управляющий вход которого соединен с выходом второго порогового блока 11 (фиг. 1), а выход - с информационным входом интегратора 22. Выход интегратора 22 является выходом собственно блока 8 измерения времени. Ключ 23 соединен своим информационным входом и выходом с соотгидрораспределителя 2. Гидрораспредели- . ветственно входом и выходом интегратора 22.
тель 2 соединен гидромагистралями с поршневой и штоковой полостями гидродомкрата 3. Сливная гидромагистраль гидрораспределителя 2 соединена с входом датчика 4 расхода. Выход датчика 4 расхода соединен с входом первого порогового бло- 40 ка 5, с информационным входом блока 6 интегрирования и информационным входом блока 7 усреднения, кроме того, выход первого порогового блока 5 соединен с управляющим входом блока 6 интегрирования и информационным входом блока 8 измерения времени. Выход блока 7 усреднения соединен с первым входом блока 9 умножения, второй вход которого соединен с выходом блока 8 измерения времени, который соедиУправляющий вход ключа 23 соединен с вы- ход01М одновибратора 24. Вход одновибра- тора 24 соединен с выходом второго порогового блока 11.
Система работает следующим образом.
На внешний вход блока 1 памяти приходит сигнал, например, с управляющей вычислительной машины, несущий информацию о том, в какую сторону и на какую величину должен переместиться шток гидродомкрата 3. Сигнал проходит на дешифратор 12 (фиг. 2). Пусть, например, первые 8 бит сигнала несут информацию о том, на какую величину должен переместится шток гидродомкрата. Эта часть информации попадает через дешифратор на регистр 13, занен также с управляющим входом блока 7 50 ЦАП 16, где преобразуется из к6усреднения. Выход блока 9 умножения и выход блока 6 интегрирования соединены с двумя входами блока 10 суммирования. Выход блока 10 суммирования соединен с информационным входом второго порогового
да в аналоговую величину уставки для настройки второго порогового блока 11 системы. Последние 2 бита информации из УВМ однозначно определяют в какую сторону должно произойти перемещение штока
блока 11. Управляющий вход второго поро-55 гидродомкрата 3 (фиг. 1). Эти два бита
гового блока 11 соединен с третьим выходомпопадают на триггеры 14 и 15. Один из
блока I памяти. Выход порогового бло-них включается и управляет гидрораспрека П соединен с Ьлч.дом блока 1 памятиделителем 2 (фиг. 1). После включения гид
0
5
0
и с управляющим входом блока 8 измерения времени. В состав блока 1 памяти (фиг. 2) входит дешифратор 12, выходы которого соединены с входом регистра 13 и входами триггеров 14 и 15. Выходы триггеров 14 и 15 являются соответственно первым и вторым выходами блока 1 памяти и поступают на входы блока 2. Выход регистра 13 соединен с входом цифроаналогово- го преобразователя 16, выход которого является третьим выходом блока 1 памяти и соединен с управляющим входом блока 11. Вторые входы регистра 13 и триггеров 14 и 15 являются вторым входом блока 1 памяти и соединены с выходом второго порогового блока 11 (фиг. 1). Блок 6 интегрирования (фиг. 3) состоит из собственного интегратора 17 и ключа 18, информационный вход и выход которого соединены соответственно с входом и выходом интегратора 17, а управляющий вход соединен с выходом первого порогового блока 5 (фиг. 1).
Блок 8 измерения времени может быть организован, например, следующим образом (фиг. 4). При этом выход источника 19 эталонного напряжения соединен с информационным входом ключа 20, управляющий вход которого соединен с первым пороговым блоком 5 (фиг. 1). Выход ключа 20 соединен с информационным входом ключа 21, управляющий вход которого соединен с выходом второго порогового блока 11 (фиг. 1), а выход - с информационным входом интегратора 22. Выход интегратора 22 является выходом собственно блока 8 измерения времени. Ключ 23 соединен своим информационным входом и выходом с соответственно входом и выходом интегратора 22.
Управляющий вход ключа 23 соединен с вы- ход01М одновибратора 24. Вход одновибра- тора 24 соединен с выходом второго порогового блока 11.
Система работает следующим образом.
На внешний вход блока 1 памяти приходит сигнал, например, с управляющей вычислительной машины, несущий информацию о том, в какую сторону и на какую величину должен переместиться шток гидродомкрата 3. Сигнал проходит на дешифратор 12 (фиг. 2). Пусть, например, первые 8 бит сигнала несут информацию о том, на какую величину должен переместится шток гидродомкрата. Эта часть информации попадает через дешифратор на регистр 13, за ЦАП 16, где преобразуется из к6да в аналоговую величину уставки для настройки второго порогового блока 11 системы. Последние 2 бита информации из УВМ однозначно определяют в какую сторону должно произойти перемещение штока
гидродомкрата 3 (фиг. 1). Эти два бита
рораспределитель 2 коммутирует гидромагистрали гидродомкрата 3 с напорной и сливной магистралями гидросистемы. Гидродомкрат перемещается и в гидросистеме появляется расход рабочей жидкости. На электрическом выходе датчика 4 расхода, установленного в сливной магистрали гидрораспределителя, появляется сигнал, который попадает на первый пороговый блок 5, настроенный на небольшую уставку.
Назначение первого порогового блока 5 следующее. На выходе датчика 4 расхода даже в состоянии покоя системы могут происходить небольшие колебания сигнала, это может быть связано с нестабильностями электронной схемы датчика. Для того, чтобы эти помехи не воспринимались блоком 6 интегрирования как полезный сигнал, используется первый пороговый блок 5. При превышении сигнала с датчика 4 расхода установки, на которую настроен пороговый блок 5, на управляющий вход блока 6 интегрирования, управляющий вход ключа 18 (фиг. 3) приходит разрешающий сигнал с выхода порогового блока 5. На информационный вход блока 6 интегрирования, вход интегратора 17 {фиг. 3), приходит сигнал с датчика 4 расхода рабочей жидкости. В блоке 6 интегрирования после поступления разрешающего сигнала ключ 18 размыкается и в интеграторе 17 происходит интегрирование сигнала датчика 4, несущего информацию о расходе рабочей жидкости в сливной магистрали гидрораспределителя. На выходе блока 6 интегрирования появляется сигнал, соответствующий объему вытесненной из гидродомкрата рабочей жидкости. Сигнал с датчика 4 расхода попадает также на информационный вход блока 7 усреднения. Здесь происходит скользящее усреднение сигнала датчика 4 расхода. Время скользящего усреднения, на которое настроен блок 7, равно времени запаздывания гидрораспределителя 2 при последнем отключении. Сигнал на выходе блока 7 усреднения соответствует скользящему среднему значению расхода за время отключения гидрораспределителя. Этот сигнал попадает на первый вход блока 9 умножения. В блоке 9 умножения происходит перемножение сигнала, пропорционального среднему расходу за время скользящего усреднения, и сигнала, пропорционального времени запаздывания электрогидрораспределите я 2 при отключении. Сигнал, пропорциональный времени запаздывания, приходит с выхода блока 8 измерения времени.
Блок 7 усреднения может представлять собой, например, интегрирующую цепочку, в состав которой входит управляемое сопротивление, организованное, например, на биполярном транзисторе. Таким образом блок усреднения выполняет функцию скользящего усреднения входной величины с управляемым временем усреднения.
На входе блока 9 умножения появляется сигнал по величине, равный прогнози5 руемому объему вытесненной из гидродомкрата рабочей жидкости за ближайщий интервал времени, равный запаздыванию гидрораспределителя при отключении. Эта величина попадает на один из входов блока 10
.. суммирования, на второй вход которого при- .ходит сигнал с блока 6 интегрирования. Таким образом, в блоке 10 суммирования происходит сложение значения объема вытесненной из гидродомкрата жидкости и прогнозируемого объема, который будет вы5 теснен после получения команды на отключение за счет запаздывания гидрораспределителя. Полученная сумма сравнивается во втором пороговом блоке 11 с величиной уставки, поступавшей из блока 1 памяти. Как только эти величины сравняются, поро говый блок 11 даст сигнал, который попадает в блок 1 памяти, обнулит содержимое регистра 13 (фиг. 2) и переведет триггеры 14 и 15 в исходное состояние. После этого на вход гидрораспределителя
5 поступит сигнал о прекращении перемещения и система перейдет в исходное состояние.
Время запаздывания гидрораспределителя, которое вляется управляющим сигналом для блока 7 усреднения, а также подает0 ся на второй гход блока 9 умножения, измеряется в блоке 8 измерения времени. Работает блок измерения времени следующим образом. При достижении сигнала на входе блока 11 величины уставки, на выходе блока 11 (фиг. 1) появляется сигнал о
5 прекращении отработки. Этот сигнал приходит на одновибратор 24 и управляющий вход ключа 2f. Одновибратор дает короткий импульс на управляющий вход ключа 23. Ключ 23 замыкает цепь на время импульQ са от одновибратора 24 и обнуляет интегратор 22. Ключ 21 замыкается таким же образом на время импульса от блока 11. Далее через замкнутые ключи 20 и 21 сигнал с источника эталонного напряжения попадает на информационный вход интегратора 22. На
5 выходе интегратора 22 появляется сигнал, пропорциональный времени, в течение которого сигнал с источника эталонного напряжения проходит на информационный вход интегратора. Как только в гидросистеме прекратится движение рабочей жид0 кости, изменится состояние первого порогового блока 5 (фиг. 1), сигнал с выхода которого поступает на управляющий вход ключа 20. Ключ 20 при этом разомкнется. Поэтому прекратится рост сигнала на выходе интегратора 22. Этот сигнал останется пропорциональным времени отключения гидрораспределителя и будет храниться до следующего отключения гидрораспределителя. Этот сигнал и поступает на
5
управляющий вход блока 7 усреднения и второй вход блока 9 умножения.
Описанная система может быть использована для управления любым количеством гидродомкратов. Для этого увеличивается количество триггеров в блоке памяти и количество используемых гидрораспределителей. Все сливные магистрали гидрораспределителей при этом соединяются вместе и в общую сливную магистраль устанавливаетИз ySM
СИ датчик 4. Остальные блоки системы остаются без изменения.
Формула изобретения
Способ управления гидродомкратами горных машин по авт. св. № 1352053, отличающийся тем, что, с целью повышения точности управления, задаваемое время запаздывания Af гидрораспределителя определяют путем измерения, а затем запоминания его на предыдущем срабатывании
9ue.J
13
/
16
Y
В fm 11
Нз лока 11
блока 4Редактор Л. Гратилло Заказ 5404/27
Составитель В. Чуорин
Техред И. ВересКорректор М. Пожо
Тираж 459Подписное
ВНИИПИ Государственного комитета СССР по делам изобретений и открытий
113035, Москва, Ж-35, Раушская наб., д. 4/5 Производствеино-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
Из УВМ
1
/f
/5
CM
-I
ео
иг.г
Из fffJOKd 5
В ло(( 10
9U.Z.3
9иг.Л
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| Л | |||
| О структуре электрогидравлического регулятора перемещения режущих органов горной мащины | |||
| М.: МГИ, 1985 | |||
| Способ управления гидродомкратами горных машин | 1986 |
|
SU1352053A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
