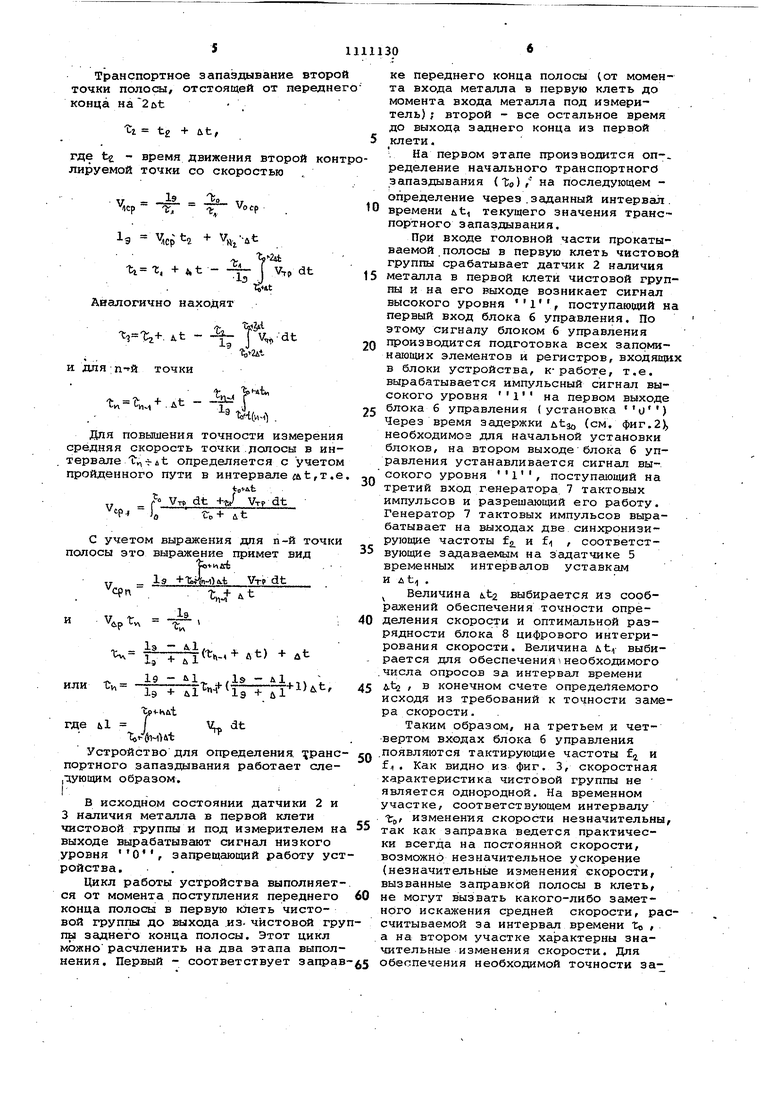
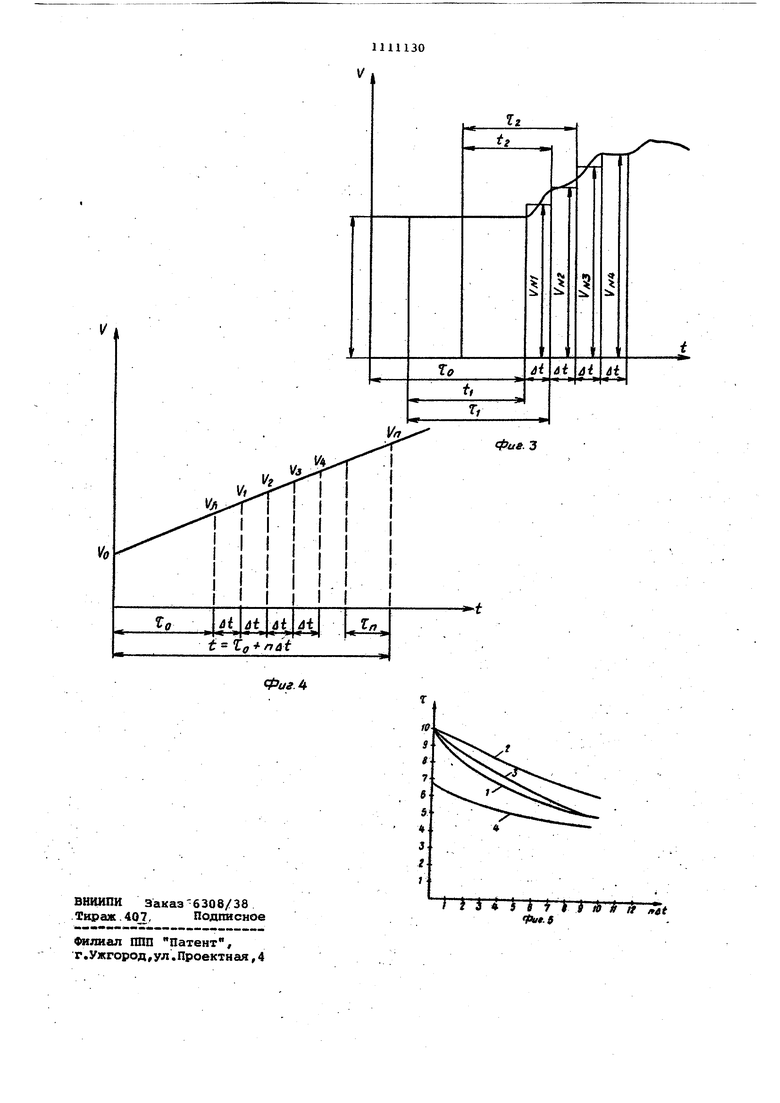
ла циклов усреднения и с четвертым входом блока цифрового интегрирования скорости, четвертый выход - с пятым входом блока цифрового интегрирования скорости, пятый выход - с вторым входом блока памяти, шестой 5 выход - с входом блока вычисления запаздывания, седьмой выход - с третьим входом блока памяти и с шестым входом блока цифрового интегрирования скорости, восьмой и девятый вы-10 ходы - соответственно с четвертым и пятым входами блока памяти, десятый выход - с четвертым входом блока вычисления запаздывания, одиннадцатый выход - с вторым входом счетчика чис- ла циклов усреднения, выход которого подключен к седьмому входу блока цифрового интегрирования скорости и к шестому входу блока вычисления запаздывания, седьмой вход которого jn соединен с первым выходом блока памяти, второй и третий выходы которого подключены соответственно к второму входу блока формирования выхода И к восьмому входу блока цифрового интегрирования скорости, соединенно ГО выходом с шест-ым входом блока памяти, седьмой вход которого подклю.чен к выходу блока вычисления запаздывания. На фиг. 1 представлена схема уст- 30 ройства; на фиг. 2 - временная диаграмма, поясняющая работу блока управления; на фиг. 3 - график, поясняющий порядок определения транспортного запаздывания точек полосы; на 35 фиг, 4 - пример скоростного режима прокатки полосы; на фиг. 5 - зависимость tr f (nut) при различных методах измерения. Устройство содержит датчик 1 фак- 0 тической скорости перемещения контролируемой точки прокатываемой полосы, датчик 2 наличия металла в первой клети чистовой группы, датчик 3 Наличия металла под измерителем, блок . 4вычисления запаздывания, задатчик 5временных интервалов, блок 6 управления, генератор 7 тактовых импульсов, блок 8 цифрового интегрирования скорости, блок 9 памяти, блок 10 формирования выхода устройства и 50 счетчик 11 числа циклов усреднения. Вычисление времени транспортного запаздывания контролируемой точки прокатываемой полосы в чистовой группе, осуществляется блоком 4 вычисле- 55 ния запазда1вания. Задание тактирующих работу устройства частот (f и ,f) , необходимое для настройки устройства на конкретный объект, про-изводит задатчик 5 временных интер- д валов. Синхронизацию и управление работой блоков устройства осуществляет блок 6 управления. Время транспортного запаздывания контролируемых точек прокатываемой 65 пол пы гд пер изм щим мет тел ред и в ся ние где V ,го до с и it из ся 1 гд Ьто по (см от на осы определяется для чистовой групклетей по выражению; 1 - &1 1э - А 1 Y +1)д,,. 1э + Л1 1э - эквивалетный путь транспортирования ; ul - приращение пути за интервал времени At; ttvv время транспортного запаздывания предыдущей точки полосы;ut - дискретность определения транспортного запаздывания. Моменты входа и выхода полосы в вую клеть чистовой группы к под еритель фиксируются соответствуюи датчиками - датчиками нгшичия алла в первой клети и под измерием. Интервал времени между входом пенего конца полосы в первую клеть ыходом его под измеритель являетначальным транспортным запаздывам. 1э ,,.dt, Ij- эквивалентный путь; -f, - мгновенная скорость транспортирования (скорость полосы, приведенная к скорости последней клети) . По времени запаздывания переднеконца полосы определяется послеательно запаздывание точек полосы нтервалом времени at. Скорость переднего конца полосы В последующие интервалы времени средние .скорости полосы на выходе стана VH,, .,. .., VN, определяютиз выражения t, At,. jv dt. Так как для любой точки полосы const, то можно записать + Vj, at. t, - время движения точки, отящей по времени от переднего конца осы на интервал со скоростью Vpcp . г, 3), Транспортное запаздывание точки, тоящей от переднего конца полосы at, равно tt,+ .At Тг t + &t, t, to+ .t - - Jv,y-dt ч Транспортное запаздывание втор точки полосы, отстоящей от передн конца на 2ut tg + ut, где te - время движения второй ко лируемой точки со скоростью V - „Ь Xicp - г. 1э дсрЧ + Ч-ut , + .t - - J Vrp dt Аналогично находят . t - и для п-й точки tit(v,.,l . 1-п IMM Для повышения точности измерен средняя скорость точки.лопосы в и тервале 1,1 -г it определяется с учет пройденного пути в интервале t,т to-it W VTP ,° VTO dt P- lo fo+ it С учетом выражения для n-й точ полосы это выражение примет вид Jcn-Mtft, Ig +Ti.4-i)A.t Ут dt 14. ITTTI - л - i IL-iir , .Is - Л1| ,ч f. 19 + где ь1 /ЧР t T j/lViHUt Устройство для определения, портного запаздывания работает сл (зующим образом. В исходном состоянии датчики 2 3 наличия металла в первой клети чистовой группы и под измерителем выходе вырабатывают сигнал низкого уровня О, запрещающий работу у ройства. . Цикл работы устройства выполняе ся от момента поступления переднег конца полосы в первую кЛеть чистовой группы до выхода .из- чистовой г пы заднего конца полосы. Этот цикл можно расчленить на два этапа выпо нения. Первый - соответствует запр ке переднего конца полосы (от момента входа металла в первую клеть до момента входа металла под измеритель) ; второй - все остальное время до выхода заднего конца из первой клети. :. На перв.ом этапе производится оп-. ределение начального транспортного запаздывания (to)/ на последующем определение через.заданный интервал, времени t, текущего значения транспортного запаздывания. При входе головной части прокатываемой полосы в первую клеть чистовой группы срабатывает датчик 2 наличия металла в первой клети чистовой группы и на его выходе возникает сигнал высокого уровня , поступаюцснй на первый вход блока 6 управления. По этому сигналу блоком 6 управления производится подготовка всех запоминающих элементов и регистров, входящих в блоки устройства, к-работе, т.е. вырабатывается импульсный сигнал высокого уровня на первом выходе блока б управления ( установка о ) Через время задержки Atjo (см. фиг.2), необходимое для начальной установки блоков, на втором выходе блока 6 управления устанавливается сигнал высокого уровня 1 поступшощий на третий вход генератора 7 тактовых импульсов и разрешающий его работу. Генератор 7 тактовых импульсов вырабатывает на выходах две син.хронизируюадие частоты f. и f-i , соответствующие задаваемым на задатчике 5 временных интервалов уставкам и д t,, . Величина b.t2 выбирается из соображений обеспечения точности определения скорости и оптимальной разрядности блока 8 цифрового интегрирования скорости. Величина it выбирается для обеспечения необходимого числа опросов за интервал времени «.Ьг , в конечном счете определяемого исходя из требований к точности замера скорости. Таким образом, на третьем .и четвертом входах блока б управления появляются тактирующие частоты fj и f1. Как видно из фиг. 3, скоростная характеристика чистовой группы не является однородной. На временном участке/ соответствующем интервалу tTof изменения скорости незначительны, так как заправка ведется практически всегда на постоянной скорости, возможно незначительное ускорение (незначительные изменения скорости, вызванные заправкой полосы в клеть, не могут вызвать какого-либо заметного искажения средней скорости, рассчитываемой за интервал времени to , а на втором участке характерны значительные изменения скорости. Для обеспечения необходимой точности замера скорости необходимо тактировани устройства на втором участке скорост ного графика частотой не менее 1 кГц но для первогоучастка этачастота является избыточной в связи с незначительными отклонениями измеряемого сигнала от средней величины. В связи с этим устройство тактируется двумя частотами f. 10 Гц - на первом участке характеристики и fj| 1 кГц на втором участке, что сопособствует более оптимальному построению устройства применительно к конкретному Ьбъекту - чистовой группе клетей npo катного стана. На третьем выходе блока б управле ния, соединенном с входами счетчика 11 числа циклов усреднения и блока 8 цифрового счетчика 11 числа циклов усреднениями блока 8 цифрового интег рирования, вырабатывается сигнал час тоты f, разрешающий опрос блоком 8 цифрового интегрирования скорости да чика 1 фактической скороЪти. Число опросов подсчитывается счетчиком 11 числа циклов усреднения. Блок 8, ; стробируемый. сигналом с третьего выхода блока б управления, осуществляет съем значений скорости и и сум мирование V Vi . -„ . J При входе головной части прокатываемой полосы под измеритель срабаты вает датчик 3 наличия металла под из мерителем и на его выходе возникает сигнал высокого уровня 1, поступающий на второй вход блока 6 управления. По этому сигналу на шестом вы ходе блока б управления вырабатывает ся импульсный сигнал высокого уровня 1 ,( Вычисление fo ) , который поступает на третий вход блока 4 вычисления запаздывания, в котором Го определяется по формуле г NO it, . Через время itj., (см. фиг. 2) , необходимое для вычисления, на десятом выходе блока б управления вырабатывается импульсный сигнал высокого уровня 1 С Запись Г„ ) , по которому блоком 9 памяти осуществляется запоминание по адресу tv, информации с выхода блока 4 вычисления заПазд1ывания, подключенного к седьмому входу блока 9 памяти. Через время, iiti.j после выработки сигнала Вычисление , представляющее сумму Ц-а .1 -я.5 где ut;;c, - время обращения к блоку 9 памяти (цикл .записи) , на четвертом выходе блока б управления вырабаты- йается импульсный сигнал высокого (Вычисление 1 ), по 65 уровня которому блоком в цифрового интегрирования производится вычисление i-tj, + Q.t (N - содержимое счетчика 11 числа циклов усреднения). Через время tjrj, необходимое для расчета блоком 8 цифрового интегрирования значения Ij, после момента появления сигнала Вычислить 1$, на пятом выходе блока б управления вырабатывается сигнал Запись Дэf поступающий на второй вход блока 9 памяти. Одновременно с сигналом Запись на одиннадцатом выходе блока б управления появляется сигнал Установка О счетчика, кото-т рыя поступает на второй вход счетчика 11, подготавливая его к следующему циклу вычисления. Таким образом, завершается цикл вычисления эквивалентной длины 1з и времени начгшьного транспортного запаздывания ID , рассчитанные значения которых помещаются в блок 9 памяти . , , Второй цикл вычислений осуществляется следующим образом. После завершения первого цикла вычислений (за время to ) заправки полосы от первой клети до измерителя на третьем выходе блока б управления, связанном с четвертым входом блока 8 цифрового интегрирования и с первым входом счетчика 11 числа циклов усреднения сигналы частоты f, сменяются сигналами частоты f) . Блок 8 цифрового интегрирования, стробируемый этими сигналами, производит съем значений скорости с датчика 1 фактической скорости и их обработку с дискретностью it, . При поступлении на третий вход блока 6 управления, подключенного к первому выходу генератора 7 тактовых импульсов, очередного импульса частоты f на седьмом выходе блока б управления вырабатывается импульсный сигнал Вычислить 1, который поступает на шестой вход блока 8 цифрового интегрирования, а также на третий вход блока 9 памяти. По этому сигналу одновременно осуществляется расчёт блоком 8 цифрового интегрирования значения 1 по выражениюи копирование бликом 9 памяти содержимого t в tv4-, . Через время ,, необходимое для расчета блоком 8, после момента появления сигнала Вьп1ислить ь1 на .восьмом выходе блока б управления вы,рабатывается сигнал Запись л1. ггоступающий на четвертый вход блока 9 памяти, по которому э ячейку л1 копируется информация, выставленная на шестом входе блока 9 памяти, сое диненном с выходом блока цифрового интегрирования. С задержкой необходимой для записи значения д1 в блок 9 памяти, по отношению к сиг налу Запись л1 на девятом выходе блока б управления вырабатываетс сигнал Вычислить t|, , поступающи на четвертый вход блока 4 вычислени запаздывания, по которому осуществляется расчет значения транспортного запаздывания. Через время , необходимое дл окончания расчета блоком 4 вычисления запаздывания, после появления сигнала Вычислить Т) на десятом выходе блока б управления вырабатывается сигнал Запись t , поступаю.щий на пятый вход блока 9 памяти по которому в ячейку Iv, копируется информация, выставленная на седьмом входе блока памяти, соединенном с выходом блока 4 вычисления запазды вания,« Одновременно с сигналом Запись Cift на одиннадцатом выходе блока 6управления вырабатываемся сигнал Установка О счетчика, подготавливающий его к новому циклу вычислений. Второй цикл-завершен. Все последующие циклы вычислений аналогичны рторому. Завершение работы устройства осу ществляется при поступлении с датчика 2 наличия металла в первой клети чистовой группы сигнала низкого уровня О, означающего выход заднего конца полосы из первой клети группы, На фиг. 4 приведен пример ско- ростного режима прокатки полосы. Ско рость полосы изменяется по известному закону VM Vo + at, где VQ - начальная скорость полосы; а - ускорение полосы. Эквивалентный путь полисы i. |;4,at..,Vt V. + ato Для данного примера транспортное запаздывание для п-го интервала . следующего после ,,, т.е. каково транспортное запаздывание точки полосы, выщедшей из последней клети группы стана через после выхода переднего конца полосы. Скорость точки полосы через время 4) faTc t-ant o .+an4t где t to + Put Любая точка полосы проходит постоянное расстояние от -первой до пос-:. ледней клети или эквивалентное значение 1з . Следовательно, 1 Vo+a(t-V)+Vo+at 4.Я+-1 г В-1 -1-5 о Ц s Cf,- ц, откуда Ц - (V +at)Xv,+ 1э О г Уо +at i i(Vo +at) -2al9 t, Для данного примера - это точное выражение, определяющее транспортное запаздывание любой точки полосы, выходящей из последней клети стана. Для данного примера известен закон изменения скорости точек полосы. Если этот закон является сложным или неизвестен, определение транспортного запаздывания указанным методом затруднительно. Устройство позволяет непрерывно определять транспортное запаздывание контролируемых точек полосы в заданЙ.ЫХ интервалах прокатки полосы, подстраивать модель объекта в управлять температурно-скоростным режимом по заданному закону. Применение устройства в системах автоматического управления температурно-скоррстным режимом прокатки металла позволит повысить качество прокатываемог-о металла за счет повышения точности поддержания заданной температуры его на выходе из чистовой группы стана. Устройство может быть Применено, в любых системах, требующих непрерывного контроля величины транспортного запаздывания транспортируемого материала, например в системах автоматического регулирования толщины полосы и управления ускоренным охлаждением полосы -на отводящих рольгангах.
ffxl omJlMH
omuMK
&Ы}.f. „ Уст. 0
Ati-O
А /ОСГГТИ
Вк.З
.fi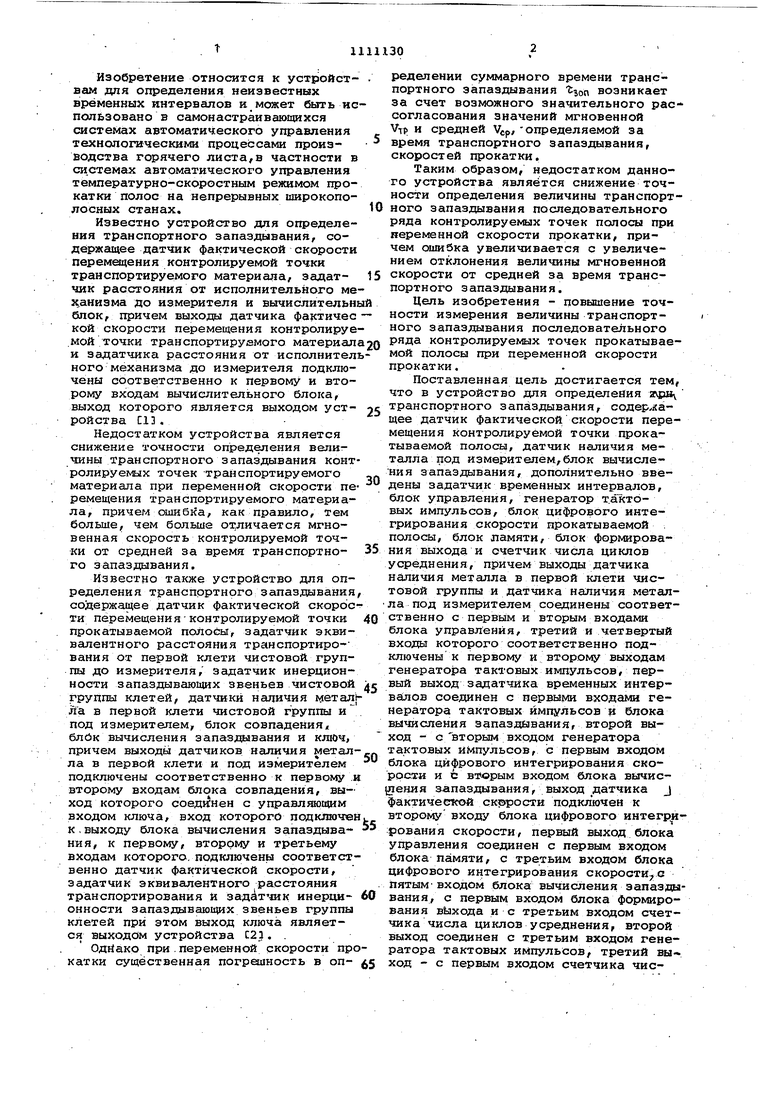


| название | год | авторы | номер документа |
|---|---|---|---|
| Способ определения транспортного запаздывания | 1980 |
|
SU910257A1 |
| Устройство регулирования ширины горячекатанных полос на непрерывном стане | 1981 |
|
SU995945A1 |
| Устройство регулирования ширины горячекатаных полос | 1980 |
|
SU908445A1 |
| Устройство для измерения межклетевого натяжения проката | 1985 |
|
SU1247114A1 |
| Система автоматического регулирования толщины полосы на стане холодной прокатки | 1982 |
|
SU1058652A1 |
| Устройство для компенсации биения валков прокатной клети | 1983 |
|
SU1100020A1 |
| Устройство для определения взаимной корреляционной функции | 1983 |
|
SU1108463A1 |
| Устройство автоматического регулирования толщины полосы на непрерывном прокатном стане | 1987 |
|
SU1435347A1 |
| Устройство компенсации влияния эксцентриситета прокатных валков на прокатываемую полосу | 1982 |
|
SU1041187A1 |
| Устройство управления скоростным режимом клетей прокатного стана | 1980 |
|
SU952393A1 |
УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ. ТРАНСПОРТНОГО ЗАПАЗДЫВАНИЯ, содержащее датчик фактической скорости перемещения контролируемой точки прокаты.ваемой полосы, датч1Ик наличия металла в первой клети чистовой группы и датчик наличия металла под измерителем и блок вычисления запаздывания, от л и ч а ю щ е е с я тем, что, с целью повышения точности измерения при переменной скорости транспортирования, в него введены задатт чик вд еменных интервалов, блок управления генератор тактовых импульсов, блок цифрового интегрирования скорости, блок памяти, блок формирования выхода И счетчик числа циклов усреднения, причем выходы датчика наличия Металла в первой клети чисто вой группы и датчика наличия Металла под измерителем соединены соответственно с первым и вторым входгши блока управления, третий и чётвертый входы которого соответственно ;Прдк аочены к первому.и второму выходам генератора тактовых импульсов, первый выход задатчика временных ий1 ервалЬв соединён с первыми входами lepaTopa тактовых импульсов, и бловыыисления запаздывания, второй сод - с вторым входом генератора тактовых импульсов, с первым входом блока цифрового интегрирования скорости и с вторым входом блока вычисления запаздывания, выход датчика фактической скорости подключен к второму входу Плока цифрового интегрирования скорЬсти, первый выход блока управления соединен с первым входом блока памяти, с третьим входом блока цифрового интегрирования скорости, с пятым входом блока вычисления запаздывания, с первым входом блока формирования выхода и с третьим входом счетчика числа циклов усреднения, второй выход соединен с третьим входом генератора тактовых импульсов, третий выход - с первым входом счетчика числа циклов усред(Л нения и с четвертым входом блока цифрового интегрирования скорости, четвертый выход - с пятым входом блока цифрового интегрирования скорости, пятый выход - с вторым входом блока па-2 мяти, шестой выход - с третьим входо блока вычислений запаздывания, седьмой йыход - с третьим входом блока па мяти и шестым входом блока цифрового интегрирования скорости, восьмой и девятый выходы соответственно-с чет- вертым и пятым входами блока памяти , десятый выход - с четвертым входом блока вычисления запаздывания, одиннадцатый выход - с вторым входом счет со чйка числа циклов усреднения, выход которого подключен к седьмсмиу входу блока цифрового интегрирования скорое ти и к шестому входу блока вычисления запаздывания,- седьмой вход которого соединен с первым выходом блокапамяти /второй и --ретий выходы которого подключены соответственно к второму .входу блока формирования выхода и к . восьмому входу блока цифрового интегри.ровання скорости, соединенйого выходом ; с шестым входом блока памяти, седьмой ;Вход которого подключен к выходу бло,;Ка вычисления запаздывания. Изобретение относится к устройствам для определения неизвестных временных интервалов и может быть ис пользовано в самонастраиваишшхся системах автоматического управления технологическими процессами проиэводства горячего листа,в частности в системах автоматического управления температурно-скоростным режимом прокатки полос на непрерывных широкополосных станах. Известно устройство для определения транспортного запаздывания, содержащее датчик фактической скорости перемещения контролируемой точки транспортируемого материала, задатчик расстояния от исполнительного ме х,анизма до измерителя и вычислительн блок, причем выходы датчика фактичес кой скорости перемещения контролируе .мой точки транспортируемого материал и задатчнка расстояния от исполнител ного механизма до измерителя подключены соответственно к первому и второму входам вычислительного блока, выход которого является выходом устройства С13. Недостатком устройства является снижение точности оп ределения вели чины транспортного запаздывания конт ролируег.ых точек трашспортируемого материала при переменной скорости пе ремещения транспортируемого материала, причем Х1Щб1са, как правило, тем больше, чем больше от,личается мгновенная скорость контролируемой точки от средней за время транспортного запаздывания. Известно также устройство для определения транспортного запаздывания содержащее датчик фактической скорое Ти перемещенияконтролируемой точки прокатываемой полосы, задатчик эквивалентного расстояния транспортиревания от первой клети чистовой группы до измерителя, задатчик инерционности запаздывающих звеньев чистовой группы клетей, датчики наличия метал ла в первой клети чистовой группы и под измерителем, блок совпадения, блик вычисления запаздывания и ключ, причем выходы датчиков наличия метал ла в первой клети и под измерителем подключены соответственно к первому .и второму входам блока совпадения, выход которого с управлшощим входом ключа, вход которого подключе к,выходу блока вычисления запаздывания, к первому, второму и третьему входам которого, подключены соответст венно датчик фактической скорости, задатчик эквивалентного расстояния транспортирования И инерционности запаздываю11 1Х звеньев группы клетей при этом выход ключа является выходом устройства С21. . Одйако при.переменной скорости пр катки существенная пограаность в определении суммарного времени транспортного запаздывания tjon возникает за счет возможного значительного рассогласования значений мгновенной VTP и средней , определяемой за время транспортного запаздывания, скоростей прокатки. Таким образом, недостатком данного устройства является снижение точности определения величины транспортного запаздывания последовательного ряда контролируемых точек полосы при неременной скорости прокатки, причем ошибка увеличивается с увеличением отклонения величины мгновенной скорости от средней за время транспортного запаздывания. Цель изобретения - повышение точности измерения величины транспортного запаздывания последовательного ряда контролируемых точек прокатываемой полосы при переменной скорости прокатки. Поставленная цель достигается тем, что в устройство для определения pHv транспортного запаздывания, содер кащее датчик фактической скорости перемещения контролируемой точки прокатываемой полосы/ датчик наличия металла под измерителем, блок вычисления запаздывания, дополнительно введены задатчик временных интервалов, блок управления, генератор тД стбвых импульсов, блок цифрового интегрирования скорости прокатываемой , полосы, блок памяти, блок формирования выхода и счетчик числа циклов усреднения, причем выходы датчика наличия металла в первой клети чистовой группы и датчика наличия металла под измерителем соединены соответственно с первым и вторым входами блока управления, третий и четвертый входы которого соответственно подключены к первому и второму выходам генератора тактовых импульсов, первый выход задатчика временных интервалов соединен с первыми входами генератора тактовых импульсов и блока вычисления запаздялвания, второй выход - свторым входом генератора тактовых Импульсов, с первым входом блока цифрового интегрирования скорости и с вторым входом блока вычис(ления запаздывания, выход датчика J фактической скррости подключен к второму входу блока цифрового интегрирования скорости, первый выход блока управления соединен с первым входом блока памяти, с третьим входом блока цифрового интегрирования скорости,, с пятым входом блока вычисления запаздывания, с первым входом блока формирования вЬахода и с третьим входом счетчика числа циклов усреднения, второй выход соединен с третьим входом генератора тактовых импульсов, третий выход - с первым входом счетчика чис
Фие.2
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Турецкий X | |||
| Анализ и синтез сжстем управления с запаздыванием | |||
| М., Машиностроение, 1974, с | |||
| Прибор для промывания газов | 1922 |
|
SU20A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Дралюк Б.И | |||
| Система автоматического -регулирования объектов с транспортным запаздыванием.М | |||
| ,Эт1ергия,1969,с | |||
| Кипятильник для воды | 1921 |
|
SU5A1 |
