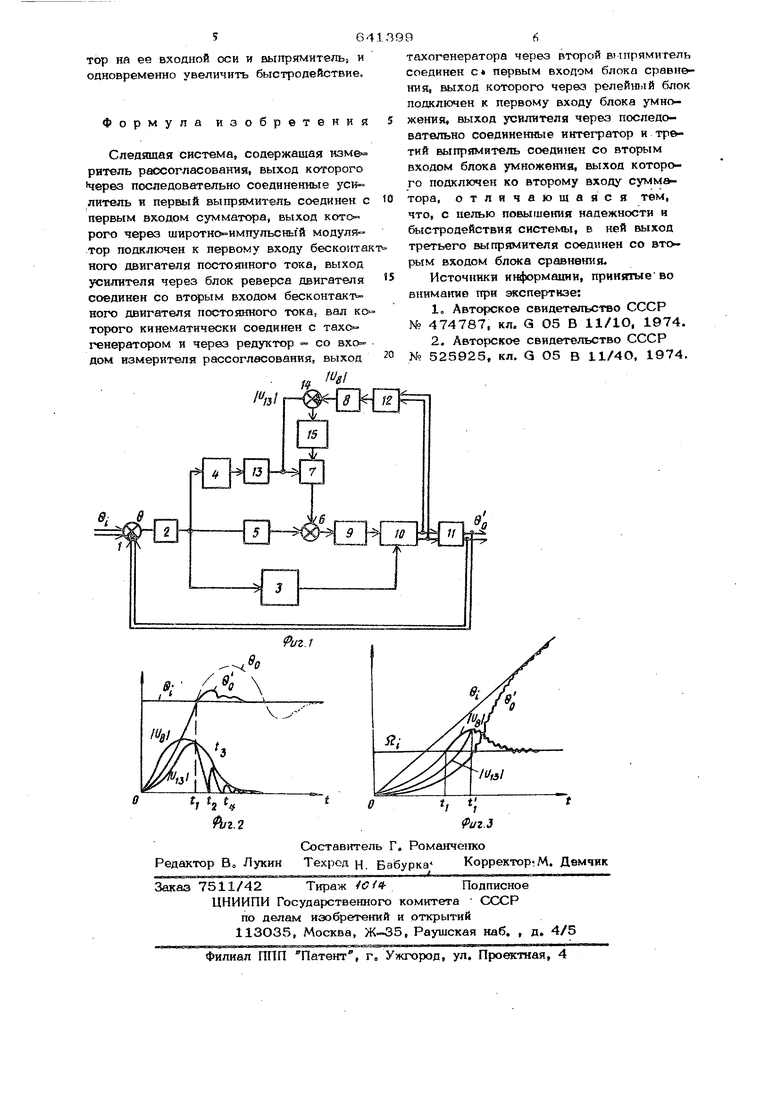
фиг. 2 и 3 - графики, характеризующие работу след$шей системы, где: измер№ тель расхзогласования 1, усилитель 2 блок реверса двигателя ,3, интегратор 4, первый выпр5змитель - 5, сумматор блок умножения - 7, второй выпрямитель 8, широтно-шмпульсный модулялятор - 9, бесконтактный двигатель (ПОСТОЯННОГО тока - Ю, редуктор - 11, т хогенератор - 12, третий выпрямиталь - 1в, блок сравнения - 14 и релейный блок - 15, входной угол - 0 выходной угол в системе-прототипе - 0 Ы)1ходной угол в предложенной системе о , напряжение на выходе второго выпрямителя -fUgl « напряжение на выходе третьего выпрямителя скорость входной оси -Л.- с Измеритель рассогласования 1 выяв ляет разность 8 входного в и выходного вд углов, которая преобразуется и усиливается усилителем 2. Выход этого уси лителя подключен к блоку реверса двига теля 3, к интегратору 4 и через первый шлпрямитель 5 к одному из входов сумматора 6, ко второму входу кбторого подключен выход блока умножения 7. На один из входов этого блока через третий .выпрямитель 13 подключен, выход интегратора 4. Вы.ход сумматора 6 соединен со входом широтно-импульсного модулятора 9, который регулирует частоту вращения бесконтактного двигателя постоянного то ка Ю, который через редуктор 11 связа с измерителем рассогласования 1. На валу двигателя,укреплен тахогенератор 12, который через второй вы рями тель 8 подключен к одному входу блока сравнения 14, ко второму входу которого подключен- выход третьетч) выпрямите ля 13, Выход блока сравнения 14 через релейшз1й блок 15 ложлючен ко второму входу блока умножения 7. Следшцая система работает следующи образом. При подаче скачкообразного входного сигнала появившееся в результате этого рассогласование приводит в надл жащее положение блок реверса двигателя 3 (фиг. l), и двигатель Ю отрабатывает это рассогласованне. Параметры системы выбираются так, что до момента согласования (фиг. 2) напряжение на Ёыходе второго млпрямитеяя 8 больше напряжения на выходе третьего ш 1прямителя 13, т. е. jUg } I . В р&зультате этого релей1&1Й блок 15 находится в положении 0 и интегратор 4 отключен от контура системы. Поэтому переходной процесс в предлагаемом приводе в интервале протекает так же, как и в системе-прототипе. В момент времени t-ti рассогласование 0 меняет свой знак, блок реверса двигателя 3 переключается, и двигатель 10 переводится в режим торможения. Одновременно, при t-t)U,l сравнивается clUgl, и в приводе возникает скользящий режим. Сущнсють этого режима состоит в следующем. Как только | Ug| релейный блок 15 переводится в состоя ние , интегратор 4 через третий №1 прямитель 13 и блок умножения i 7 под ключается к сумматору 6 и интенсивно тормозит двига:тель 10, При i tgскорость двигателя становится равной нулю, и двигатель на интервале t5° ttзpaзгoня ется в обратную сторону. Однако при t 13 опять / Ug l-lU. интегратор 4 вновь отключается. скорость уменьшается на интервале t g -t H т, д, до полного согласования осей. Таким образом, особенность системы состоит в том, что после первого согласования осей двигатель интенсивно тормозится за счет периодического подключения интегратора ошибки. В системе прототипе скользящий возникал лишь после полной остановки дййгателя, поэтому переходный процесс в ней характеризуется большей колебательностью и временем переходного процесса (кривая вд на фиг. 2). Аналогичным образом привод работает и при линейной заводке. Как видно из фиг. 3, в этом случае на интервале ,С интегратор 4 отключен от контура системы, но, нач ная с i i. , он также периодически по ключается в скользящем режиме, пока не установятся равенства ,p,oi:.p /U -f lUglcp при которых система без средней составляющей ошибки отрабатывает линейное входное воздействие. В системе прототипе скользящий режим возникает в момент времени t t при/Ug l-l(Ja-l т. е. раньше, чем в предлагаемой Системе, и протекает при меньшем значении скорости двигателя, поэтому в систем©4-прототипе переходный процесс заканчивается позже. Таким образом, благодаря подключению третьего вь прямитвл2 13 на вход блока сравнения 14 удается упростить систему«прототип, исключив тахогенера. тор на ее входной сюи и выгфямитель, и одновременно увеличить быстродействие. Формула изобретения Следтдая система, содержащая изме ритель расхзогласования, выход которого через последовательно соединенные усилитель и первый выпрямитель соединен с первым входом сумматора, выход кото роге через широтно« импульсный модуля тор подключен к первому входу бескоята ного двигателя постоянного тока, выход усилителя через блок реверса двигателя соединен со вторым входом бесконтакрного двигателя постоянного тока, вал ко торого кинематически соединен с тахо генератором и через редуктор со входом измерителя рассогласования, выход тахогенератора через второй выпрямитель соединен с первым входом блока сравнения, которого через релейшлй блок подключен к первому входу блока умножения, выход усилителя через последовательно соединенные интегратор и тр&тий выпрямитель соединен со вторым входом блока умножения, выход которого подключен ко второму входу сумм тора, отличающаяся тем, что, с целью повышения надежности и быстродействия системы, в ней выход третьего м 1прямителя coeдv нeн со вторым входом блока сравнения. Источники и ф рма1ши, принятые во внимакне при етсспертизе: 1.Авторское свидетельство СССР № 474787, кл. в О5 В 11/1О, 1974. 2.Авторское свидетельство СССР № 525925, кл. Q О5 в 11/4О, 1974.
| название | год | авторы | номер документа |
|---|---|---|---|
| Следящая система | 1987 |
|
SU1425595A1 |
| Следящая система | 1986 |
|
SU1352451A1 |
| Бесконтактная следящая система постоянного тока | 1975 |
|
SU525925A1 |
| Следящая система | 1978 |
|
SU697969A1 |
| Следящая система | 1979 |
|
SU847275A1 |
| Следящая система | 1978 |
|
SU746408A1 |
| Бесконтактная следящая система постоянного тока | 1973 |
|
SU470783A1 |
| Следящая система | 1978 |
|
SU763851A1 |
| Бесконтактная следящая система постоянного тока | 1974 |
|
SU474787A1 |
| Следящий электропривод | 1987 |
|
SU1446600A1 |
