Известны устройства для aБтo faтllзaции, например, двухстоечного кривошипного пресса, состоящие из механизма подачи листов из пакета, использующего электромагниты, валков для Подачи листов в межштамповое пространство и механизма выема листов, состоящего из электромагнитов и кулисы с автономным пр 1водом. Однако в таких устройствах велик вес движущихся масс.
В описываемом устройстве указанный недостаток устранен тем, что для уменьшения веса движущихся масс устройства применен дугостатор, снабженный роликами для уменьшения трения, поддерживающий лист на весу и подающий его в валки бегущим полем. Для увеличения надежности щаговой подачи листа в межштамповое пространство при работе пресса с непрерывным повторением цикла путем автоматического регулирования положения листа на заданном расстоянии от режущей кромки применеьЫ индуктивные датчики положения.
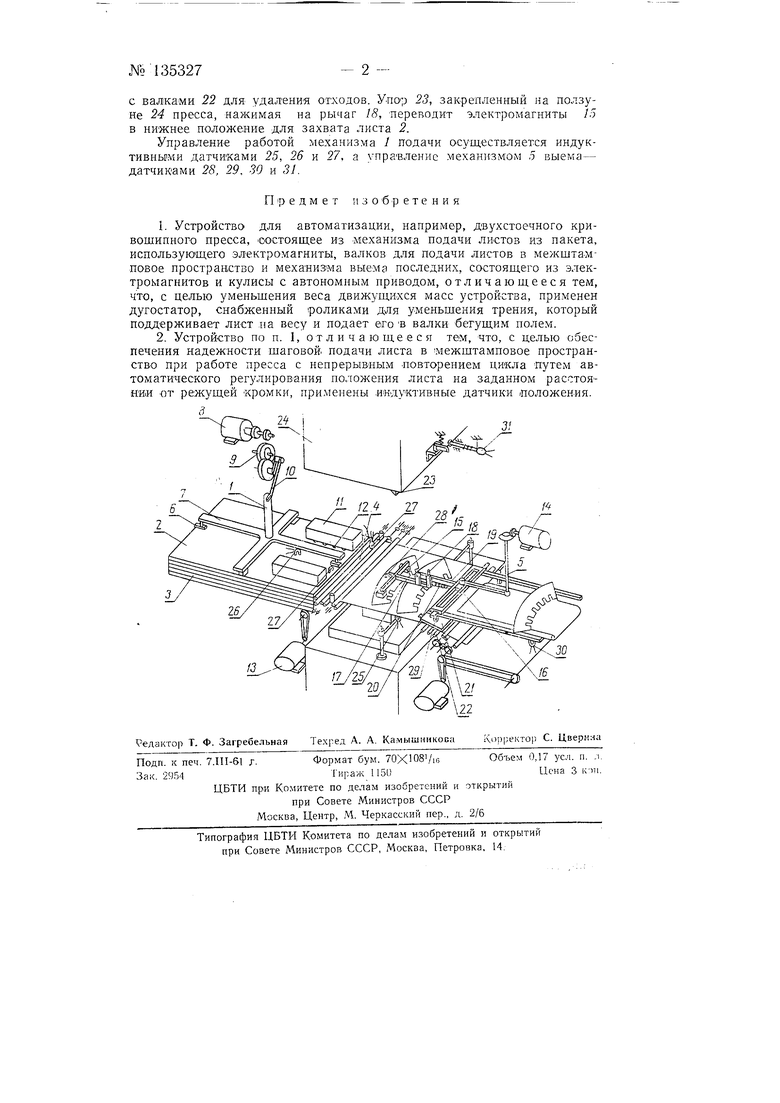
На чертеже изображено описываемое устройство.
Устройство для автоматизапии состоит из механизма / подачи листов 2 из пакета 3, валков 4 для подачи листов 2 в межштамповое пространство и механизма 5 выема листов 2.
Листы 2 лри помощи электромагнитов 6 механизма /, закрепленных на крестовине 7, приводящейся в движение от двигателя 8 через редуктор 9 и кривошипно-шатунный механизм 10, подаются под дугостаторы //, снабженные роликами 12 для уменьщения трения, поддерживающие листы 2 на весу и подаюплие и. в валки 4 бегущим полем. Валки 4 приводятся от двигателя 13.
Выем листов 2 после щтамповки производится кулисным механизмом 5, приводящимся от двигателя 14. Лист 2 притягивается электромагнитами 15, связанными с кулисой 16 рычагами 17, 18 и 19. Прз жина 20 удерживает рычаг 17 и электромагниты 15 в наивысшем положении, благодаря чему они переходят через козырек 2L слхжащий вместе