Известен самоходный мешкогюгруячик, выполненный в виде тележки с вертикальной колонной, несущей горизонтальную стрелу с захватом. Однако, он не обеспечивает полностью замену ручного труда, в особенности пои погрузке и разгрузке мешков в железнодорожные вагоны.
Предлагаемый менлкопогрузчик устроен со стрелой, состоящей яз поддерживающей наклонной балки с роликовыми опорами и выдвижной балки. Задняя часть выдвижной балки выполнена из шарнирно соединенных неполноповоротных звеньев, которые наматываются на барабан при уменьшении вылета стрелы. Это позволяет уменьшить нонеречш е габариты стрелы и увеличить ее вылет, а так/ке механизировать ряд, таких операний. как укладка мешков со стола в штабель, передача из штабеля на трансиортер, иогрузка в железнодорожный вагон и выгрузка ir него, разгрузка грузовых автомобилей и т. и.
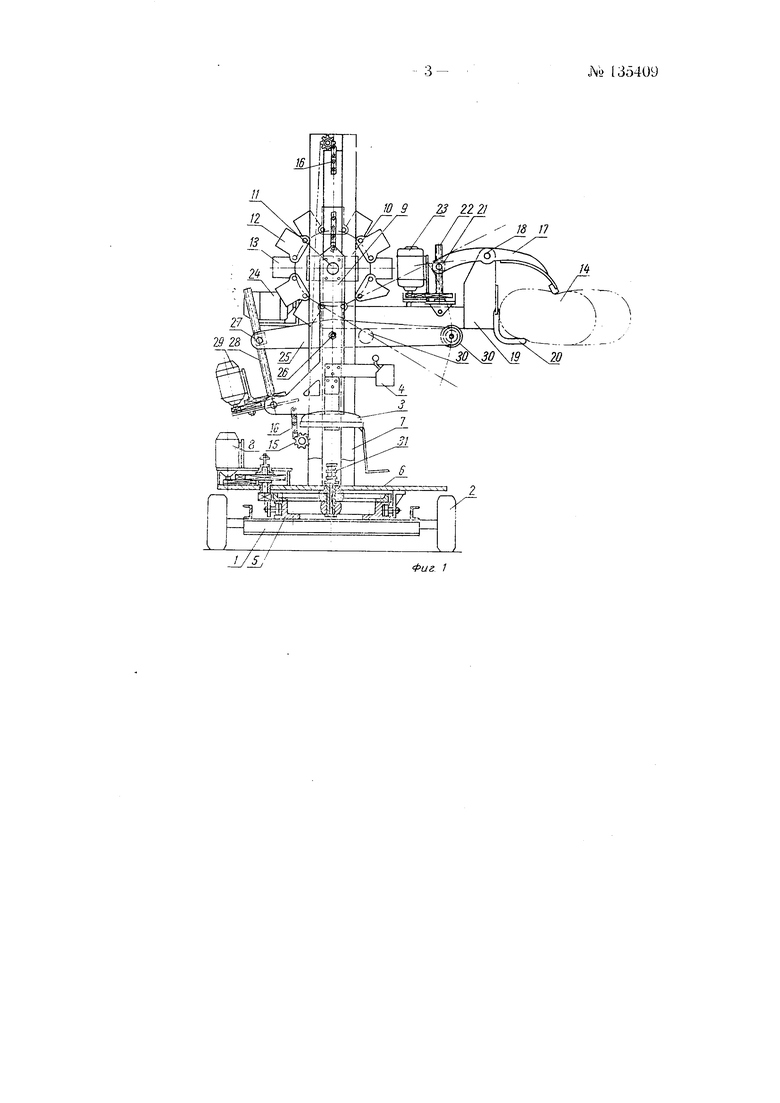
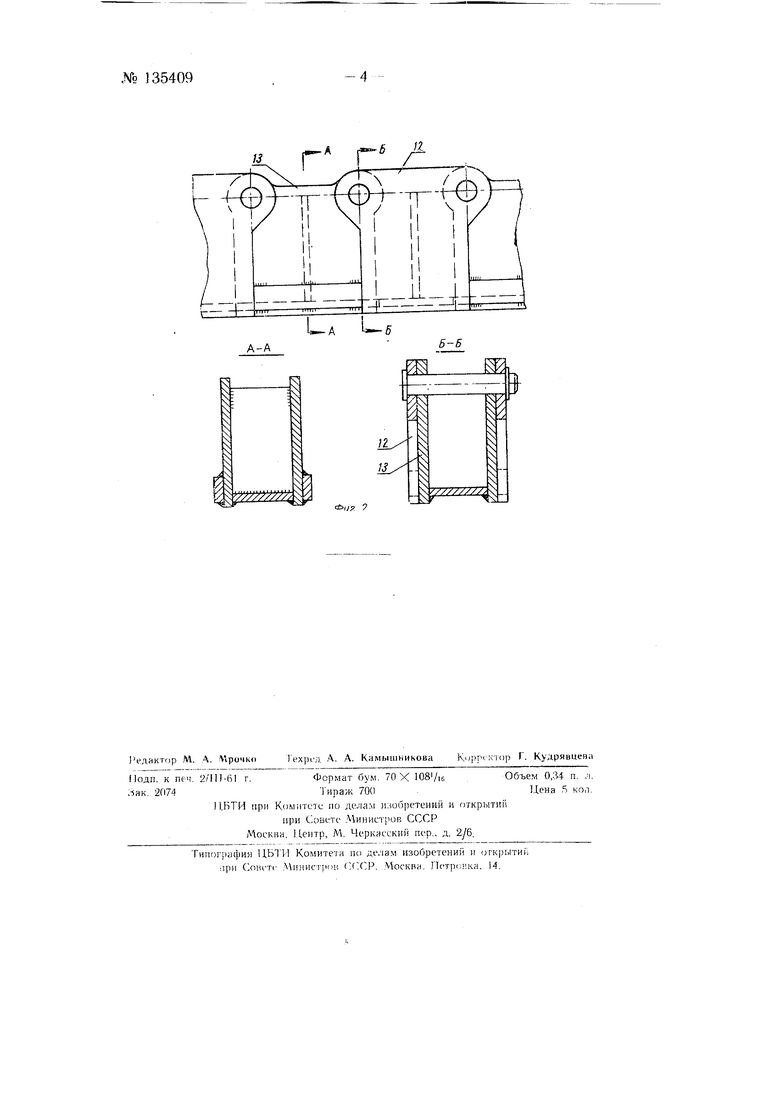
На фиг. I изображена схема устройства мешкопогрузчика: на (|)иг. 2-устройство гибкой части рычага захватов с сеченнем по А-А и /5-5.
Все узлы мешконогрузчнка смонтированы на самоходной тележке /. нередвигаемой при помощи отдельного электродвигателя (на схеме не показан). Тележка установлена на четырех колесах 2, два из которых являются ведущими, а другие два - направляюпгими, колеса понорачиваютея с помощью руля оператором, находящимся на сиденье 3. там же имеется иодножка и пульт управления 4. На раме закрепл(н поворотный крут 5, на котором вращается плита 6 с колонной 7. несущей на себе все рабочие органы мешкопогрззчпка. Враи1,ение осуществляется электродвигателем 8 при помощи системы зубчаток. На колонне 7 нмеется рабочая головка, состоящая из двух 9, несущих на себе зубчатый барабан 10, вращающийся на оси 11. На этот барабан наматывается гибкая часть рычага, состоящая из широких 12 и УЗКИХ 13 секций, нкчрнирно соединенных leждy собой. Вся рабочая i.iOBKa вхгесте с операторо). мо№135409-2
жег подним ггься вверх или опускаться вниз в зависимости от высоты, на которой находится мешок 14, подлежащий захвату и перемещению. Подъем и опускание рабочей головки производится через звездочку 15 и роликовую цепь 16 отдельным электродвигателем (на схеме не показан). Захватное ариепособление состоит из подвижного захвата /7 вращающегося па осп 18 и укрепленного на рычаге, имеющем жесткую 19 и гибкую 12-13 части, и неподвижного захвата 20. Подвиж:ный захват П па одном конце имеет гайку 21, при помопш которой он получает вертикальное движение от винта 22, соединенного зубчатой передачей е электродвигателем .25, и осуществляет прочный захват мещка 14. Гибкая чаеть захватного приспособления имеет такую конструкцию, которая позволяет производить изгиб только в одну сторону, в выпрямленпом горизонтальном положении гибкая и жесткая части рычага образуют нсесткий рычаг. Это обеспечивает уменьшение габаритов тележки, так как гибкая хвостовая его часть не выходит за колонну 7. Выдвижение механизма захвата (вперед или наза.а) производится червячным редуктором от электродвигателя 24. Для передвижения захватного приспособления в вертикальной плоскости служит рычаг 25, укрепленный в колонне па цапфах 26. На одном из концов рычага 25 имеетея гайка 27, двигающаяся на виите 28 ири помощи электродвигателя 29 и системы зубчатой передачи. Для скольжения рычагов 25 и 19 друг с другом на рычаге установлены ролики 30. Все шесть электродвигателей включаютея с пульта управления 4, а niirainie подключается к ним от электросети через сколь зяпик- контакты 31.
П р е д м ( т и 3 о б р е т е н и я
С амоходный .1е1нкопогрузчик, выполненный в виде тележки с вертикальной поворотной колонной, несущей стрелу с захватным приспособлением, отличающийся тем, что, е целью уменьшеиия габаритов стрелы и для увеличения ее вылета, она еостоит из подд,ерживаюид,ей наклонной балки с роликовыми опорами и выдвижной балки, задияя часть которой выполнена пз шарнирно соединенных иеполноиоворотных звеньев, при уменьшении вылета стрелы намат1,1ваемых на барабан, закрепленный на колорп1е.
18 17
Фиг 1
LA U
A-A
аЬ|Уя 9
Б-Б
ZZZZZZZ/ KSif
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТАНОВКА ДЛЯ СБОРА ПЛАВАЮЩЕЙ И ОСЕВШЕЙ ДРЕВЕСИНЫ НА ВОДОХРАНИЛИЩАХ | 2009 |
|
RU2449916C2 |
| МАШИНА ДЛЯ СРЕЗАНИЯ СУЧЬЕВ С ПОВАЛЕННЫХДЕРЕВЬЕВ | 1972 |
|
SU359790A1 |
| Телескопический ленточный конвейер | 1976 |
|
SU745796A1 |
| Приспособление для укладки и разборки железнодорожных путей звеньями | 1924 |
|
SU1570A1 |
| Автопогрузчик для укладки в штабель и разборки из него различного рода штучных грузов | 1959 |
|
SU126413A1 |
| Устройство для разгрузки вагонов | 1985 |
|
SU1346548A1 |
| Подвесной кран | 1971 |
|
SU598834A1 |
| Устройство, предотвращающее перегрузку стрелового крана | 1950 |
|
SU93008A1 |
| Трюмный погрузчик | 1959 |
|
SU126048A1 |
| Трюмная погрузочная машина | 1958 |
|
SU118325A1 |