Изобретение относится к машиностроению, а именно к робототехнике, и может быть иснользовано для механизации и автоматизации технологических процессов.
Цель изобретения - улучшение динамических характеристик за счет обеспечения стабильной жесткости механической системы.
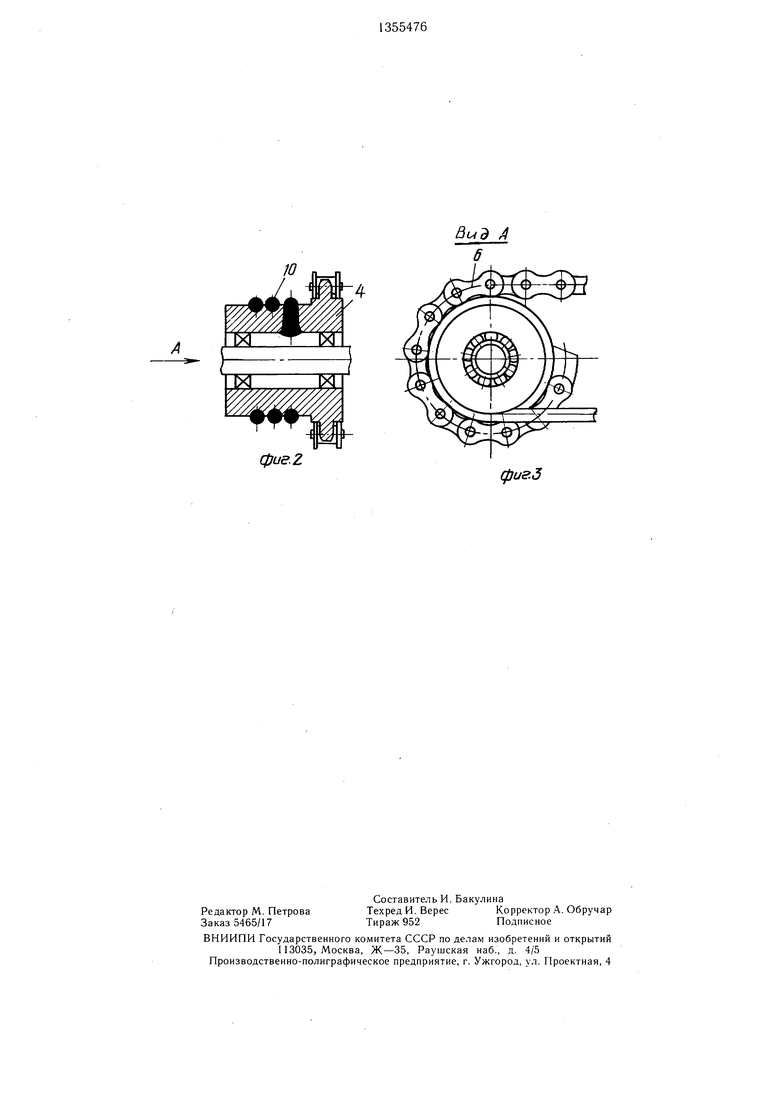
На фиг. 1 изображена кинематическая схема руки манинулятора; на фиг. 2 - барабан с закрепленными на нем тросом и цепью; на фиг. 3 - вид А на фиг. 2.
Рука манипулятора состоит из неподвижного корпуса 1, в котором размещены подвижные телескопические звенья - наружное и внутреннее 3. В неподвижном корпусе 1 на осях (не показаны) установлены барабаны 4 и 5. Подвижные звенья кинематически связаны с приводом посредством гибкого тягового органа. Гибкий тяговый орган выполнен из двух ветвей, каждая из которых образована цепью и тросом. На барабанах 4 и 5 закреплены одни концы цепей 6 и 7 соответственно ветвей гибкого тягового органа. Вторые концы цепей 6 и 7 закреплены на внутреннем подвижном телескопическом звене 3.
Цепи 6 и 7 огибают соответствующие ролики 8 и 9, установленные на наружном телескопическом зене 2. На неподвижном корпусе 1 закреплены одними концами тросы 10 и 11 соответственно ветвей гибкого тягового органа, натяжение которых регулируется с помощью соответствующих винтов 12 и 13 и гаек 14 и 15. Другие концы тросов 10 и 11 соответствующих барабанах 4 и 5 намотаны во встречном направлении, т.е. противоположном направлению навивки цепей 6 и 7. На неподвижном корпусе 1 установлен электропривод 16, связанный гайкой 17 и винтом 18 с наружным подвижным телескопическим звеном 2.
Рука манипулятора работает следующим образом.
Винтом 12 и гайкой 14 регулируют натяжение и длину троса 10, винтом 13 и гайкой 15 - натяжение и длину троса 11, причем для обеспечения натяжения всего гибкого тягового органа регулировку осуществляют так, чтобы при увеличении длины одного из тросов уменьщалась длина другого. С изменением длины свободной (рабочей) части тросов 10 и 11 изменяется их жесткость. Таким образом создается возможность регулировки жесткости каждой из ветвей гибкого тягового органа и цепей 6 и 7 в зависимости от характеристик переходного процесса.
5
0
5
0
5
0
5
0
Цри включении электропривода 16 происходит выдвижение телескопического подвижного звена 2 с установленными на нем роликами 8 и 9. Под воздействием гибкого тягового органа выдвигается внутреннее телескопическое подвижное звено 3. При больщих скоростях перемещения телескопических подвижных звеньев 2 и 3 и при их резком разгоне или торможении на цепи 6 или 7 (в зависимости от режима) начинает воздействовать дополнительная динамическая сила, вызыванная инерцией телескопических подвижных звеньев 2 и 3 и закрепленного на последнем полезного груза. Например, при резком торможении выдвигаемых подвижных элементов цепь 6 деформируется в сторону удлинения, воздействуя на барабан 4, который стремится повернуться. Барабан 4 воздействует на трос 10, деформируя его, при этом натяжение цепи 7 гибкого тягового органа уменьшается, а так как трос 11 предварительно натянут, барабан 5 стремится повернуться, натягивая цепь 7, цепь -7 накручивается на барабан 5 компенсируя тем самым провисание цепи.
Таким образом регулируется каждая ветвь гибкого тягового органа, чем достигается жесткостная характеристика гибкого тягового органа в любой точке хода механической руки.
Формула изобретения
Рука манипулятора, содержащая неподвижный корпус, в котором установлены телескопические подвижные звенья, кинематически связанные с приводом посредством гибкого тягового органа, огибающего ролики, установленные на наружном подвижном звене, при этом внутреннее подвижное звено имеет рабочий орган, отличающаяся тем, что, с целью улучшения динамических характеристик за счет с)беспечения стабильной жесткости механической системы, он снабжен двумя барабанами, установленными в неподвижном корпусе, а гибкий тяговый орган выполнен из двух ветвей, каждая из которых образована цепью и тросом, при этом трос каждой ветви одним концом закреплен на корпусе с возможностью его регулировочного натяжения, а другим - на соответствующем барабане, а цепь одним концом закреплена на внутреннем подвижном звене, а другим концом - на барабане в направлении, встречном направлению навивки троса на этом барабане.
фие-Z
фигЗ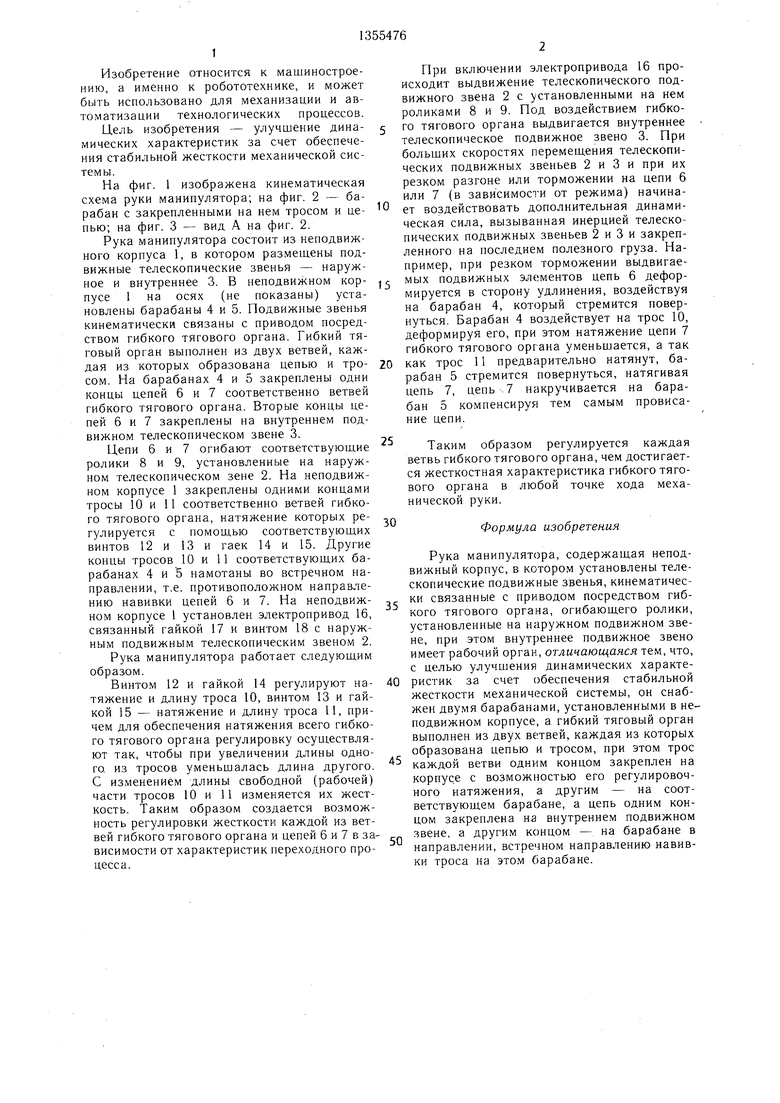
| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор | 1974 |
|
SU503710A1 |
| Манипулятор | 1986 |
|
SU1351782A1 |
| Рука манипулятора | 1983 |
|
SU1076276A1 |
| НЕСУЩАЯ МЕХАНИЧЕСКАЯ СИСТЕМА | 2006 |
|
RU2312761C1 |
| ТЕЛЕСКОПИЧЕСКОЕ СТРЕЛОВОЕ УСТРОЙСТВО | 2021 |
|
RU2772764C1 |
| ПОДЪЕМНОЕ УСТРОЙСТВО | 2024 |
|
RU2835700C1 |
| Телескопическая стрела манипулятора | 1976 |
|
SU555007A1 |
| Телескопический ленточный конвейер | 1980 |
|
SU908672A1 |
| ВЫДВИЖНОЕ УСТРОЙСТВО | 2001 |
|
RU2205770C2 |
| Телескопический ленточный конвейер | 1986 |
|
SU1407861A1 |
Изобретение относится к машиностроению, а именно к робототехнике, и может быть использовано для механизации и автоматизации технологических процессов. Целью изобретения является улучшение динамических характеристик за счет обеспечения стабильной жесткости механической системы. Для этого на неподвижном корпусе 1 установлены барабаны 4 и 5. Подвижные звенья кинематически связаны с приводом посредством гибкого тягового органа. Одни концы цепей 6 и 7 соответственно закреплены на барабанах 4 и 5, ветвей гибкого тягового органа, а другие - на внутреннем подвижном телескопическом звене 3. Цепи 6 и 7 огибают соответствующие ролики 8 и 9, установленные на наружном телескопическом звене 2. На неподвижном корпусе 1 закреплены одними концами тросы 10 и 11 ветвей гибкого тягового органа, натяжение которых регулируется с по- мошью соответствующих винтов 12 и 13 и гаек 14 и 15. Другие концы тросов 10 и II на соответствующих барабанах 4 и 5 намотаны во встречном направлении. На неподвижном корпусе 1 установлен элктропривод 16, связанный гайкой 17 и винтом 18 с наружным подвижным телескопическим звеном 2. 3 ил. (Л ГТ J 12 6 10 1 5 фае.1 со СП СП 05 /lf7/JV/V/nf//7r ГТ 1 5 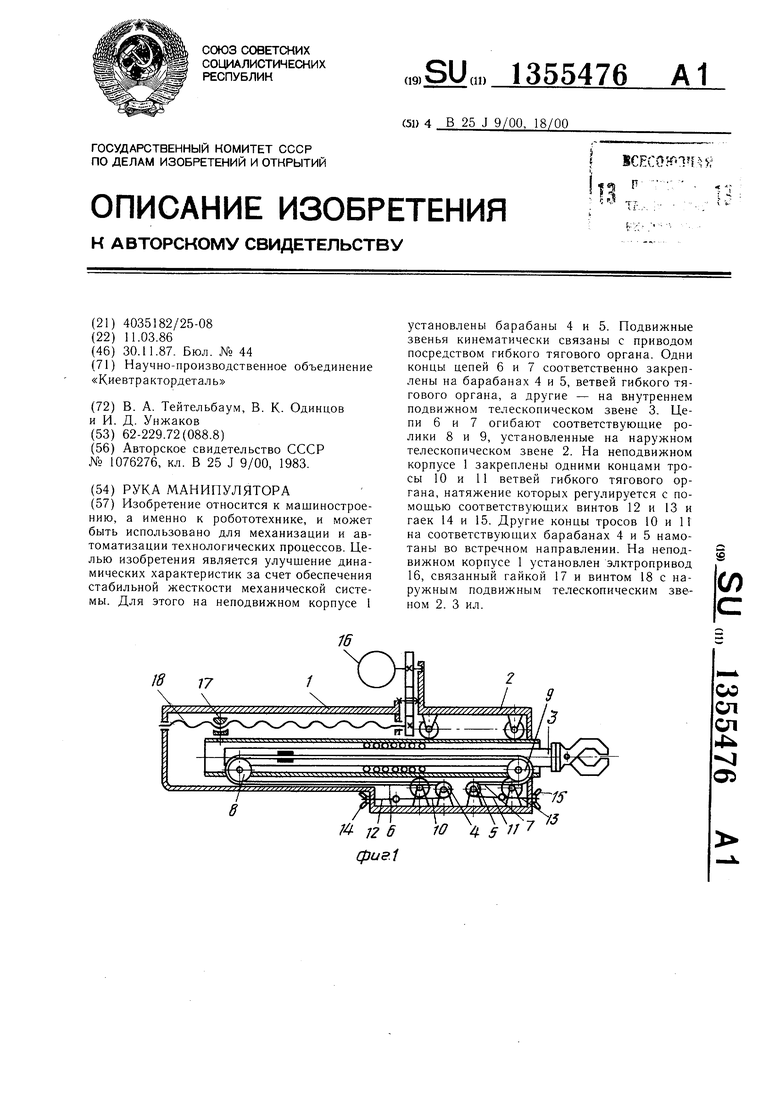
Редактор М. Петрова Заказ 5465/17
ВНИИПИ Государственного комитета СССР по делам изобретений и открытий
113035, Москва, Ж-35, Раушская наб., д. 4/5 Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
Составитель И. Бакулина
Техред И. ВересКорректор А. Обручар
Тираж 952Подписное
| Рука манипулятора | 1983 |
|
SU1076276A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
