fe5
т:
/
/ /
/ 15
17
(Pui.j
в
15
Изобретение относится к машиностроению, а именно к промышленным роботам и манипуляторам, предназначенным для оснащения технологического оборудования средствами автоматической загрузки, выгрузки и ориентации.
Известна рука манипулятора, содержащая неподвижный корпус, в котором установлены телескопические подвижные звенья, привод, захват и замкнутый гибкий тяговых орган, связанный с захватом j.
Недостатком известной руки манипулятора являются ограниченные функциональные возможности, так как ограничена зона обслуживания и не обеспечивается точное позицирование в промежуточных точках.
Цель изобретения - расширение функциональных возможностей механизма.
Поставленная цель достигается тем, что рука манипулятора, содержащая неподвижный корпус, в котором установлены телескопические подвижные звенья, привод, захват и замкнутый гибкий тяговый орган, связанный с захватом, снабжена стойками, укрепленными соответственно на внутреннем и наружном телескопических звеньях, и дополнительно замкнутым гибким тяговым органом по числу подвижных звеньев, причем последние шарнирно соединены со стойками, а на последнем телескопическом звене жестко закреплен дополнительно введенный кронштейн, кинематически связанный с приводом, при этом в корпусе и подвижных телескопических звеньях выполнены направляющие, а подвижные телескопические звенья снабжены опорными роликами, сопрягающимися с этими направляющими.
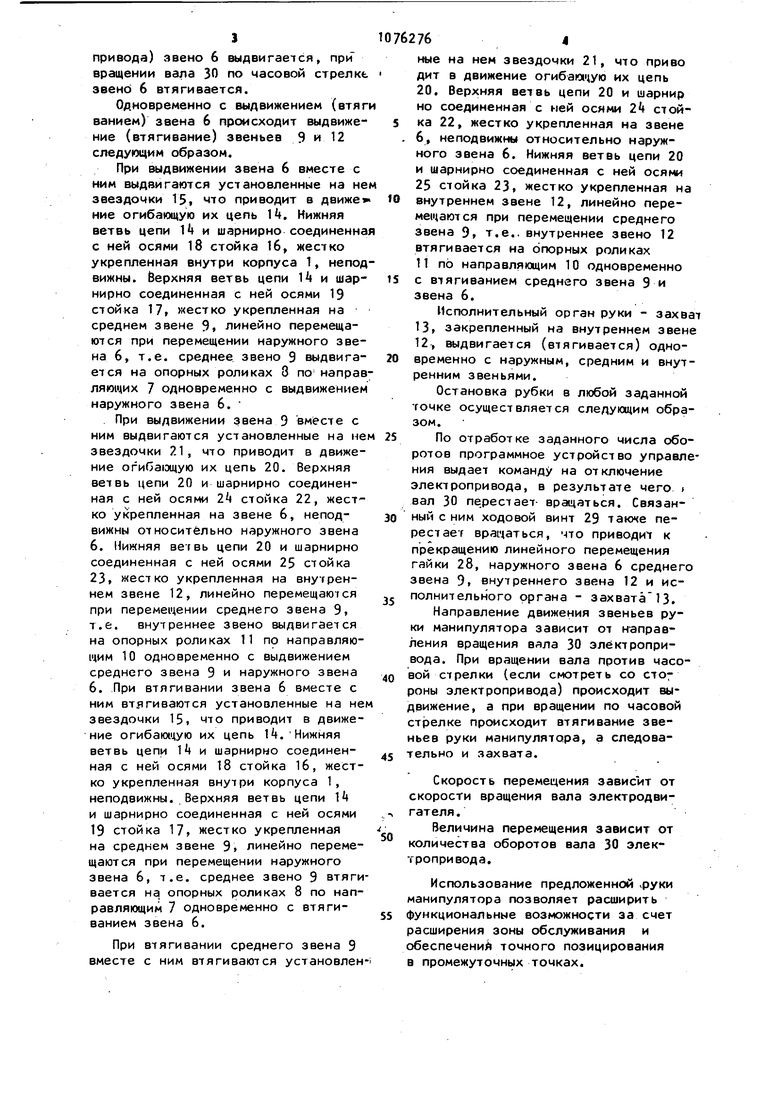
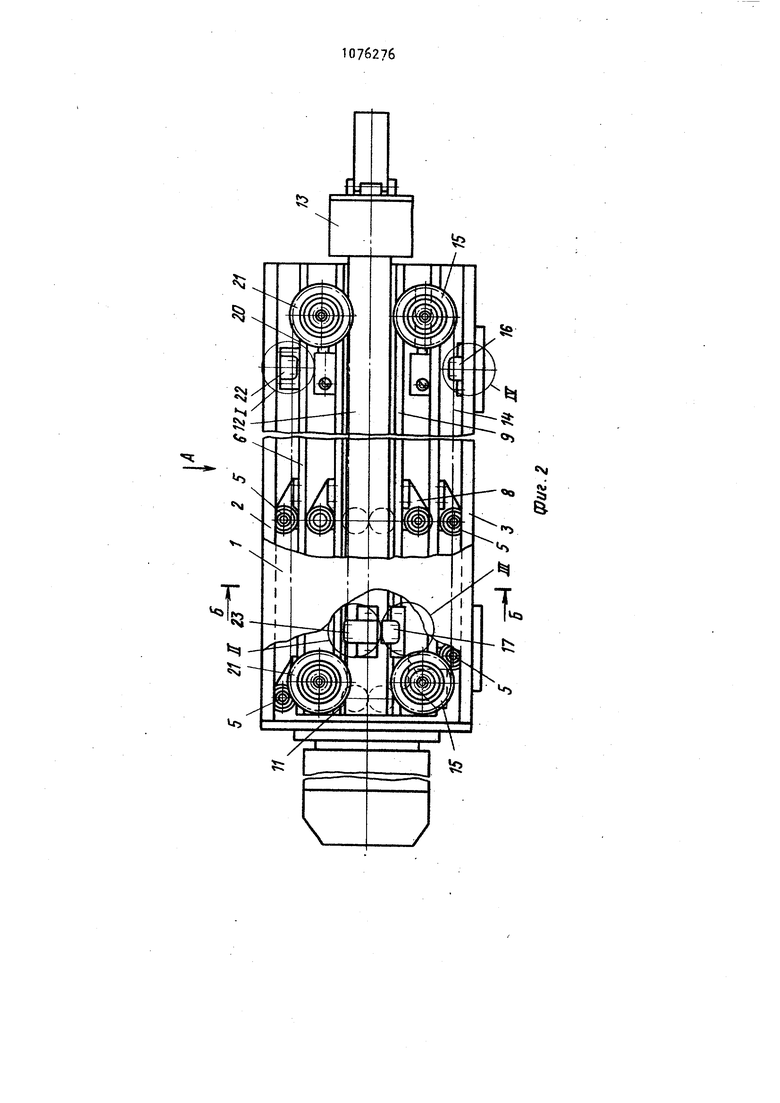
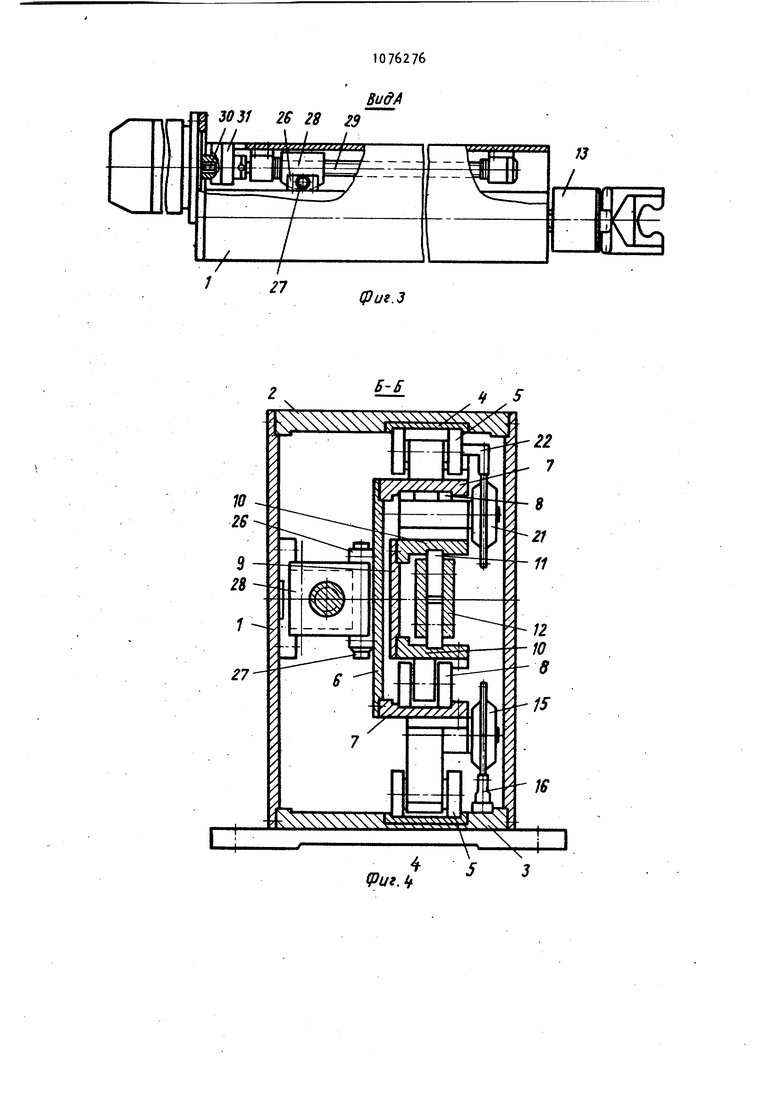
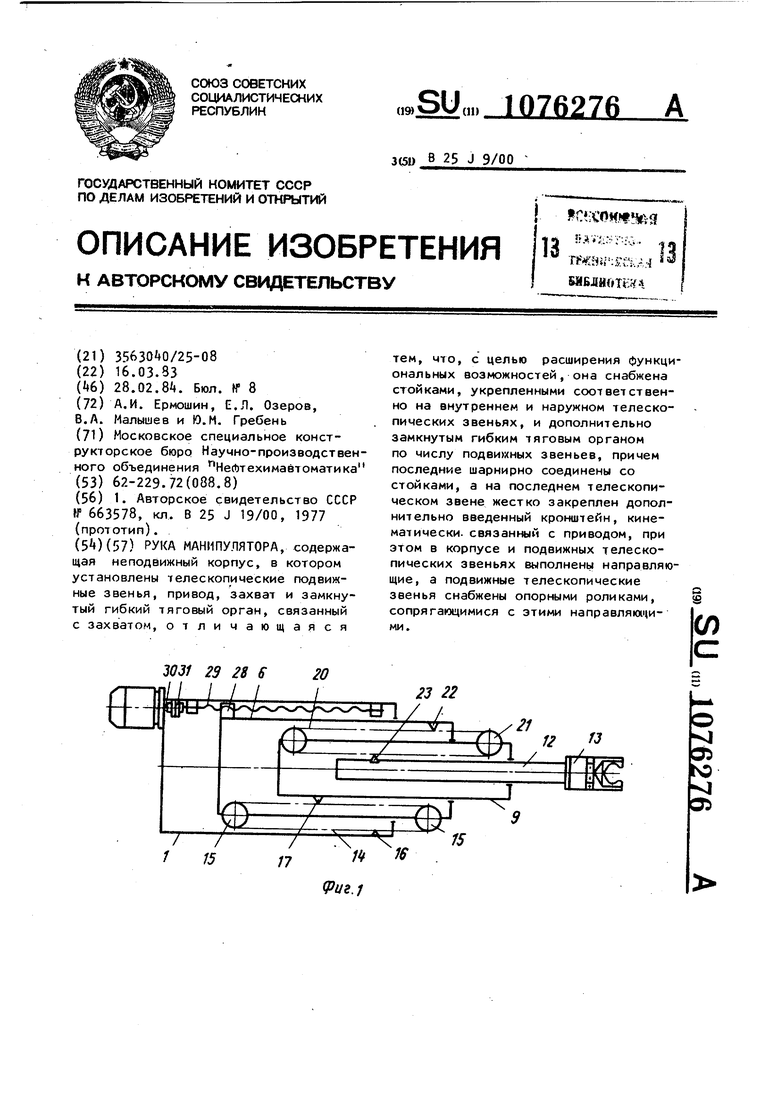
На фиг. 1 показана кинематическая схема руки манипулятора; на фиг. 2 рука манипулятора, общий вид; на фиг. 3 вид по стрелке А на фиг. 2; на фиг. - разрез Б-Б на фиг. 2; на Фиг. 5 узел 1 на фиг. 2; на фиг. 6 - узел 11 на фиг. 2; на фиг. 7 узел III на фиг. 2; на фиг. 8 - узел IV на Лиг. 2; на фиг. 9 вид по стрелке 8 на фиг 5;i , нафиг. 10 - вид по стрелке Г на фиг. 6; на фиг. 11 вид по стрелке Дна фиг.7; на фиг. 12 вид по стрелке Е на фиг. 8.
Рука манипулятора состоит из корпуса 1, имеющего в сечении коробчатую форму, в котором установлены телескопические подвижные звенья. В плите 2 и основании 3 корпуса 1 выполнены направляющие 4 для опорных роликов 5«установленных на наружном П-образном звене 6. Внутри наружного звена 6 выполнены направляющие 7, по которым могут перемещаться опорные ролики 8, установленные на среднем П-образном звене 9, внутри которого выполнены направляющие 10, предназначенные для перемещения по ним опорных роликов 11, установленных на внутреннем звене 12, на котором закреплен захват 13.
Наружное звено 6 снабжено замкнутым гибким тяговым органом, выполненным в виде цепи 1 А, огибающей две звездочки 15, установленные на осях укрепленных на наружной звене. Внутри корпуса 1 и на среднем звене 9 жестко укреплены стойки, соответственно 16 и 17, которые осями 18 и 19 связаны с цепью 1, образуя шарнирные соединения. Среднее звено 9 также снабжено гибким тяговым органом, выполненным в виде цепи 20, ргибающей две звездочки 21, уста- новленные на осях, укрепленных на нем звене Я.
На наружном звене 6 и внутреннем звене 12 жестко укреплены стойки, соответственно 22 и 23, которые осями 24 и 25 связаны с цепью 20, образуя шарнирные соединения.
На,наружном звене 6 жестко укреплен кронштейн 26, который осью 27 шарнирно соединен с гайкой 28, расположенной на установленном в корпусе 1 ходовом винте 29i связанном с валом 30 электропривода посредством муфты 31.
Рука манипулятора работает следующим образом. f
При поступлении команд от программного управления (не показано) вал 3 электропривода начинает вращаться. Это вращение через муфту 31 передается ходовому винту 29. При вращении.ходового винта 29 расположенная на нем гайка 28 и шарнирно соединенный с нем осью 27 кронштейн 2б, жестко укрепленный на звене 6, будут линейно перемещаться, т.е. звено 6 будет перемещаться на опорных роликах 5 по направляю1чим 4. При вращении вала 30 против часовой стрелки (если смотреть со стороны электропривода) звено 6 выдвигается, при вращении вала 30 по часовой стрелке звено б втягивается. Одновременно с выдвижением (втя ванием) звена 6 происходит выдвижение (втягивание) звеньев 3 и 12 следующим образом. При выдвижении звена 6 вместе с ним выдвигаются установленные на не звездочки 15t что приводит в движе ние огибающую их цепь 14. Нижняя ветвь цепи 1 и шарнирно соединенна с ней осями 18 стойка 16, жестко укрепленная внутри корпуса 1, непод вижны, верхняя ветвь цепи 1А и шарнирно соединенная с ней осями 19 стойка 17, «естко укрепленная на среднем звене Э, линейно перемещаются при перемещении наружного звена 6, т.е. среднее звено 9 выдвигается на опорных роликах 8 по направ ляющих 7 одновременно с выдвижением наружного звена 6. При выдвижении звена 9 вместе с ним выдвигаются установленные на не звездочки 21, что приводит в движение огибающую их цепь 20. Верхняя ветвь цепи 20 и шарнирно соединенная с ней осями стойка 22, жестко укрепленная на звене 6, неподвижны относительно наружного звена 6. Нижняя ветвь цепи 20 и шарнирно соединенная с ней осями 25 стойка 23, жестко укрепленная на внутреннем звене 12, линейно перемещаются при перемещении среднего звена 9, т.е. внутреннее звено выдвигается на опорных роликах 11 по направляющим 10 одновременно с выдвижением среднего звена 9 и наружного звена 6. При втягивании звена 6 вместе с ним втягиваются установленные на не звездочки 15, что приводит в движение огибаю1чую их цепь I.Нижняя ветвь цепи I и шарнирно соединенная с ней осями 18 стойка 16, жестко укрепленная внутри корпуса 1, неподвижны. Верхняя ветвь цепи I и шарнирно соединенная с ней осями 19 стойка 17, жестко укрепленная на среднем звене 9 линейно перемещаются при перемещении наружного звена 6, т.е. среднее звено 9 втяги вается на опорных роликах 8 по направляющим 7 одновременно с втягиванием звена 6. При втягивании среднего звена 9 вместе с ним втягиваются установлен 764 ные на нем звездочки 21, что приво дит в движение огибащую их цепь 20. Верхняя ветвь цепи 20 и шарнир но соединенная с ней осями 2 стойка 22, жестко укрепленная на звене 6, неподвижны относительно наружного звена 6. Нижняя ветвь цепи 20 и шарнирно соединенная с ней осями 25 стойка 23, жестко укрепленная на внутреннем звене 12, линейно перемещаются при перемещении среднего звена 9 т.е., внутреннее звено 12 втягивается на опорных роликах 11 по направляющим 10 одновременно с втягиванием среднего звена 9 и звена 6. Исполнительный орган руки - захват 13, закрепленный на внутреннем звене 12, выдвигается (втягивается) одновременно с наружным, средним и внутренним звеньями. Остановка рубки в любой заданной точке осуществляется следующим образом. По отработке заданного числа оборотов программное устройство управления выдает команду на отключение электропривода, в результате чего t вал 30 перестает- вращаться. Связанный с ним ходовой винт 29 также перестает вращаться, что приводит к прекращению линейного перемещения гайки 28, наружного звена 6 среднего звена 9, внутреннего звена 12 и исполнит ел ьного органа - захвата 13. Направление движения звеньев руки манипулятора зависит от направления вращения вяла 30 электропривода. При вращении вала против часовой стрелки (если смотреть со СТО7 роны электропривода) происходит вывижение, а при вращении по часовой стрелке происходит втягивание звеньев руки манипулятора, а следоваельно и захвата. Скорость перемещения зависит от скорости вращения вала электродвигателя. Величина перемещения зависит от количества оборотов вала 30 электропривода. Использование предложенной .руки манипулятора позволяет расширить ункциональные возможности за счет расширения зоны обслуживания и беспечений точного позицирования в промежуточных точках. 3031 ге 2i гэ (риг.З
| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор | 1978 |
|
SU795937A1 |
| ГИДРАВЛИЧЕСКИЙ ТЕЛЕСКОПИЧЕСКИЙ ПОДЪЕМНИК | 1995 |
|
RU2108280C1 |
| Мобильный робот | 1988 |
|
SU1662834A1 |
| Манипулятор Николаева | 1985 |
|
SU1296397A1 |
| ЛЕСОЗАГОТОВИТЕЛЬНАЯ МАШИНАВСЕСОЮЗНАЯnATEHTHO-TEXH^^iECri^r | 1970 |
|
SU282800A1 |
| ТЕЛЕСКОПИЧЕСКОЕ СТРЕЛОВОЕ УСТРОЙСТВО | 2021 |
|
RU2772764C1 |
| Конвейерное устройство для перемещения груза из крытого вагона | 1988 |
|
SU1640081A1 |
| Рука манипулятора | 1986 |
|
SU1355476A1 |
| Перегрузочное устройство | 1987 |
|
SU1602833A1 |
| УСТРОЙСТВО ДЛЯ ПЕРЕМЕЩЕНИЯ ГРУЗОВ, ПРЕИМУЩЕСТВЕННО ЗА ПРЕДЕЛАМИ НАХОДЯЩЕГОСЯ НА ОРБИТЕ КОСМИЧЕСКОГО КОРАБЛЯ | 2000 |
|
RU2167084C1 |

В-Б
Ui.lf
гч
20 25 J.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Телескопический механизм выдвижения рабочего органа | 1977 |
|
SU663578A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
