гг
19
00
Од
iJX/tt
,
Изобретение относится к подъемно- транспортному машиностроению, а именно к ленточным телескопическим конвейерам,
Целью изобретения является повьш е- ние надежности работы конвейера путем уменьшения сопротивления движению ленты.
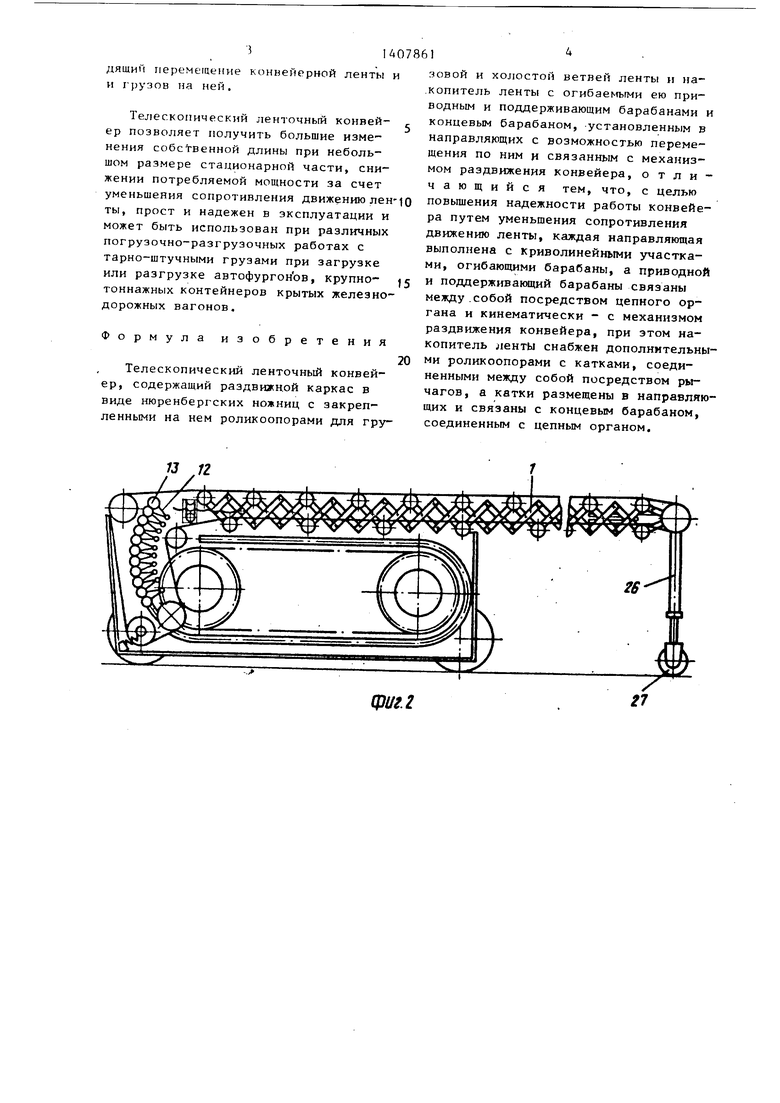
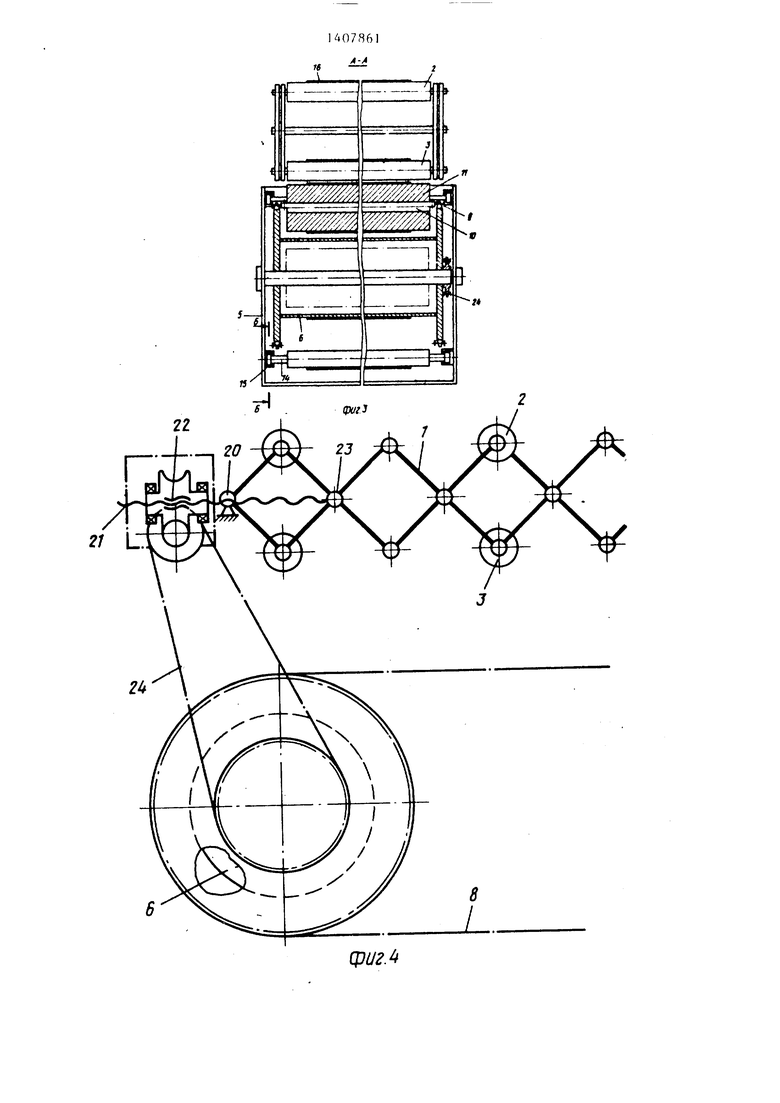
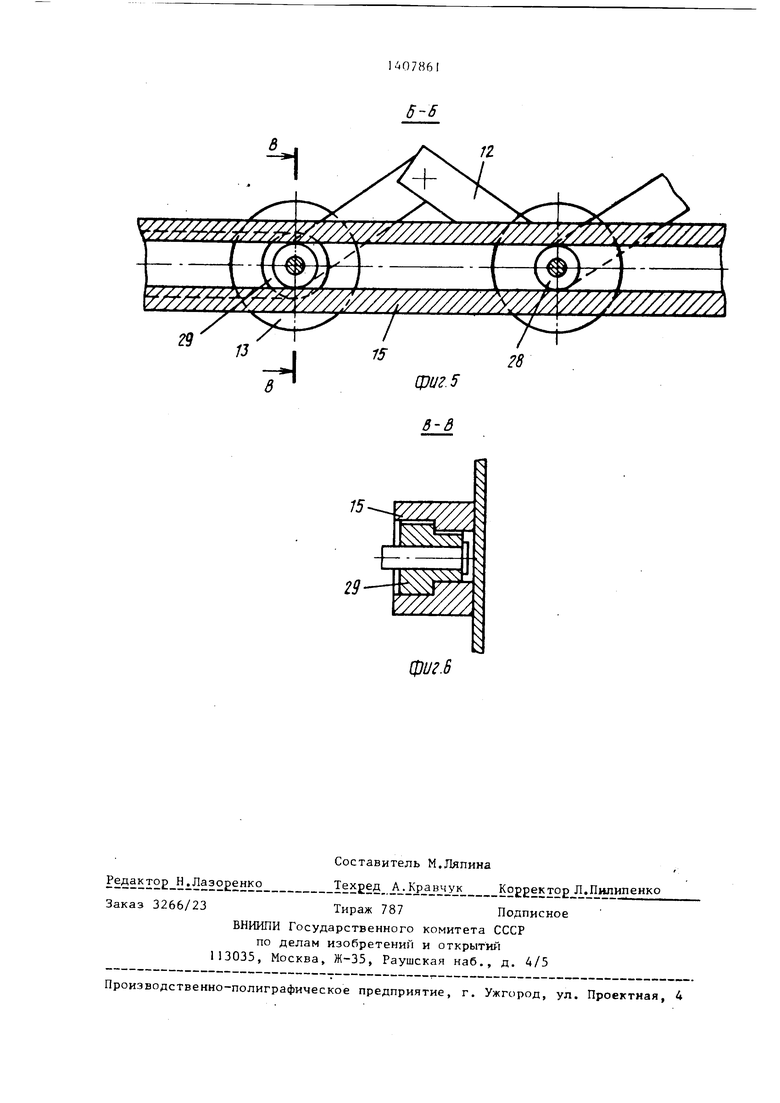
На фиг,1 изображен телескопический ленточный конвейер в сдвинутом положении, общий вид; на фиг,2 - то же, в раздвинутом положении; на фиг.З - разрез А-А на фиг.1; на фиг.А - кинематическая схема привода выдвижения каркаса; на фиг.З - разрез Б-Б на фиг.З; на фиг.6 - разрез В-В на фиг.5
Телескопический ленточный конвейер содержит раздвижной каркас J в виде шарнирно-сочлененных рычагов, об- разующих механизм типа нюренбергских ножниц, на которых укреплены ролико- опоры 2 для грузовой и роликоопоры 3 для холостой ветвей конвейера.- Раздвижной каркас соединен с приводным барабаном 4, В корпусе 5 размещен накопитель для ленты, состоящий из приводного 6 и поддерживающего 7 барабанов, соединенных двойной цепной передачей 8, к параллельным звеньям 9 которой присоединены концы оси J О подвижного концевого барабана 1 1 и первое звено раздвижного рычажного многозвен- ника 12 с дополнительными поддерживающими роликоопорами 13,оси 14 которых имеют катки и перемещаютсяпо направляющим 15, имеющим прямолинейные и криволинейные участки.
Лента 16 последовательно огибает приводной барабан 4, неподвижный ба- рабан 17, подпружиненный барабан 18, роликоопоры 13, подвижнь1Й барабан и, поддерживающий барабан 7, приводной барабан 6, неподвижный барабан 9. Увеличение или уменьщение длины раз- движиого каркаса 1, прикрепленного к корпусу 5 через шарнир 20 производится посредством пары винт 21 - гайка 22 путем вращения последней. Причем винт 21 связан с шарниром 23, Передача крутящего момента на гайку 22 производится путем отбора мощности от приводного барабана 6 через передачу 24 и редуктор 25. Консольньй конец каркаса 1 опирается на телескопическую стойку 26 с роликом 27. На концы осей 14 одеты гладкие ролики 28, а на последней оси - ступенчатые ролики 29, при этом направляющая J5 на
участке от точки К до точки К имеет ступенчатую форму.
Конвейер работает следующим образом.
Выдвижение раздвижного каркаса на требуемую длину производится путем передачи вращения от прИводного барабана 6 на кинематическую пару винт 21 гайка 22, преобразующую вращательное движение в поступательное перемещение каркаса , Передаточное отношение кинематической цепи, включающей в себя приводной барабан 6, передачу 24, редуктор 25, пару винт 21 - гайка 22,- рассчитано так, что величина линейного перемещения продольной оси приводного барабана 4 равна величине перемещения продольной оси п.од- вижного барабана JJ.
Нри вращении приводного барабана подвижный барабан 11, перемещаясь ,-- вперед или назад, толкает перед собой или тянет за собой раздвижной рычажный многозвенник 12 и ролико- опорами 13, которые поддерживают конвейерную ленту 16 на криволинейном участке. Для обеспечения гарантированного раздвижения многозвенника 12 на концах оси 14 последнего звена надеты ступенчатые ролики 29, препятствующие его перемещению далее точки к .
Компенсация возможных прослабле- ний в натяжении ленты производится подпружиненным барабаном 18, Кроме того, постоянное натяжение ленты конвейера обеспечивается рычажным механизмом 30, связывающим раздвижной каркас 1 и приводной барабан 4. Длина звеньев рычажного механизма 30 подбирается всегда большей, чем длина звеньев раздвижного каркаса J, и при перемещении последнего вперед Происходит дополнительная поднатяжка ленты 16, компенсирующая ее прослаб- ление вследствие уменьшения толщины каркаса 1. При перемещении каркаса 1 в исходное положение происходит работа механизмов в обратной последовательности.
, После выдвижения каркаса 1 на требуемую длину приводной барабан 6 выключается, при этом выдвижной каркас 1 фиксируется в заданном положении за счет кинематической пары винт 21 - гайка 22. Затем включается электроприводной барабан 4, производящий перемещение конвейерной ленты и и j-рузов на ней.
Телескопический ленточный конвей- ер позволяет получить большие изме нения собственной длины при небольшом размере стационарной части, снижении потребляемой мощности за счет уменьшения сопротивления движению лен ты, прост и надежен в эксплуатации и может быть использован при различных погрузочно-разгрузочных работах с тарно-штучными грузами при загрузке или разгрузке автофургон ов, крупнотоннажных контейнеров крытых железнодорожных вагонов.
Формула изобретения
Телескопический ленточный конвейер, содержащий раздвижной каркас в виде нюренбергских ножниц с закрепленными на нем роликоопорами для гру
, 07861
зоной и холостой ветвей ленты и накопитель ленты с огибаемыми ею приводным и поддерживающим барабанами и концевым барабаном, установленнь1М в направляющих с возможностью перемещения по ним и связанным с механизмом раздвижения конвейера, отличающийся тем, что, с целью повьшения надежности работы конвейера путем уменьшения сопротивления движению ленты, каждая направляющая выполнена с криволинейными участками, огибающими барабаны, а приводной и поддерживающий барабаны связаны между.собой посредством цепного органа и кинематически - с механизмом раздвижения конвейера, при этом накопитель ленты снабжен дополнительными роликоопорами с катками, соединенными между собой посредством рычагов, а катки размещены в направляющих и связаны с концевым барабаном, соединенным с цепным органом.
15
20
| название | год | авторы | номер документа |
|---|---|---|---|
| Телескопический ленточный конвейер | 1988 |
|
SU1680596A1 |
| ТЕЛЕСКОПИЧЕСКИЙ ТРАНСПОРТЕР | 1991 |
|
RU2036125C1 |
| Телескопический конвейер | 1989 |
|
SU1717505A1 |
| ТЕЛЕСКОПИЧЕСКИЙ ЛЕНТОЧНЫЙ КОНВЕЙЕР}>&(^^соОЛЗНАл | 1973 |
|
SU372130A1 |
| Перегружатель ленточный раздвижной | 2023 |
|
RU2814534C1 |
| Телескопический ленточный конвейер | 1983 |
|
SU1093635A1 |
| Телескопический ленточный конвейер | 1976 |
|
SU745796A1 |
| Телескопический ленточный конвейер | 1977 |
|
SU707857A1 |
| Телескопический ленточный конвейер | 1980 |
|
SU908672A1 |
| Телескопический ленточный конвейер | 1990 |
|
SU1799819A1 |
Изобретение относится к подъемно-транспортному машиностроению, а именно к ленточным телескопическим конвейерам. Цель - повышение надежности работы конвейера путем уменьшения сопротивления движению ленты.Для этого в накопителе для ленты привод-ной и поддерживающий барабаны (Б) 6,7 соединены двойной цепной передачей 8. К параллельным звеньям последней присоединены концы оси подвижного концевого Б 11 и первое звено раздвижного рычажного многозвенника 12 с дополнительными роликоопорами 13, оси которых имеют катки и перемещаются по направляющим, имеющим прямолинейные и криволинейные участки. Выдвижение раздвижного каркаса 1 на требуемую длину производится путем передачи вращения от Б 6 на кинематическую пару винт 21 - гайка, преобразующую вращательное движение в поступательное перемещение каркаса 1. При вращении приводного Б 6 подвижный Б 11, перемещаясь вперед или назад, толкает перед собой или тянет за собой раздвижной рычажный многозвенник 12 с роликоопорами 13, поддерживающими ленту 16,на криволинейном участке. Для компенсации возможных прослаблений ленты 16 предусмотрен Б 18, а для натяжения ленты 16 - рычажный меха-- низм 30, связывающий раздвижной кар-. кас I и Б 4. 6 ил. О (Л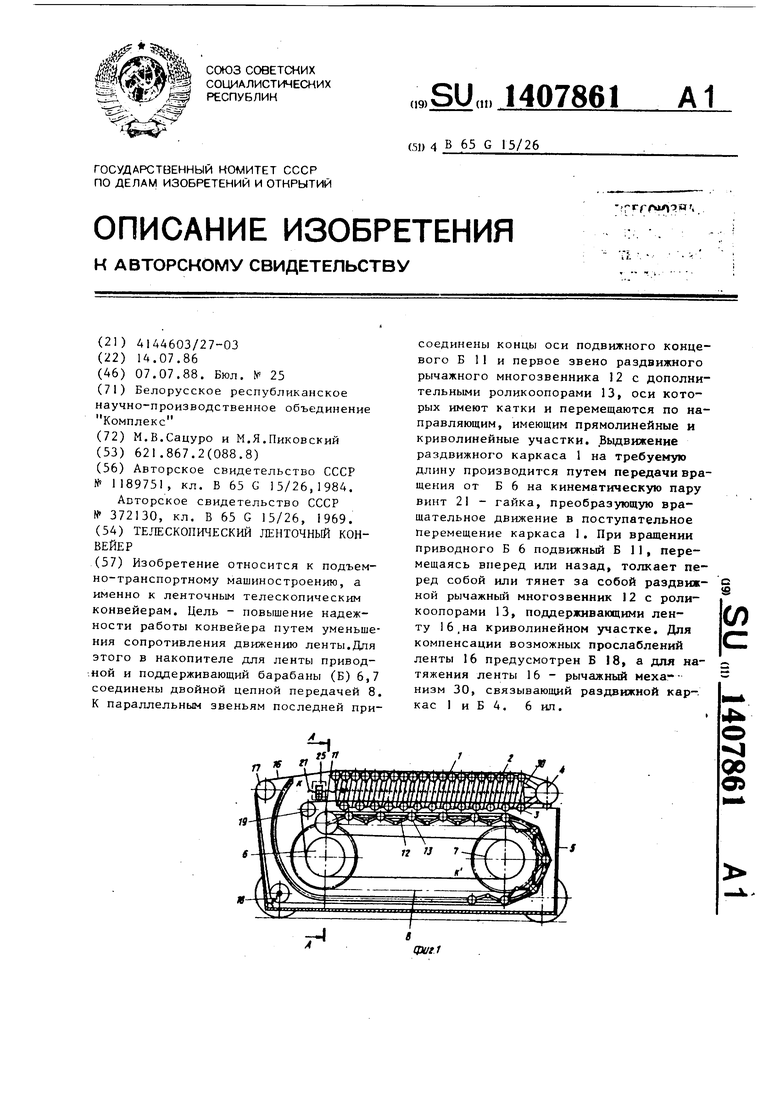
фиг. г
21 Lфиг.
УА(.
Ш/У//// ////////
I
7S28
CPU г. 5
фиг.В
| Авторское свидетельство СССР № 1189751, кл | |||
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
| ТЕЛЕСКОПИЧЕСКИЙ ЛЕНТОЧНЫЙ КОНВЕЙЕР}>&(^^соОЛЗНАл | 0 |
|
SU372130A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
