Изобретение относится к гидромашиностроению, а именно к способам балансировки поворотнолопастных рабочих колес осевых насосов, и может быть применено при балансировке рабочих колес гидротурбин.
Цель изобретения - упрощение процесса и повышение точности балансировки лопастного колеса насоса.
На чертеже показана схема неуравновешенного ротора осевого насоса.
Ротор осевого насоса, включающий рабочее колесо 1 с лопастями 2 и вал 3, установленный в верхнем 4 и нижнем 5 направляющих подшипниках, Ось рабочего колеса 1 расположена на расстоянии h от нижнего подшипника и на расстоянии h от верхнего подшипника,
-, Способ балансировки осуществляется следующим образом.
Рабочему колесу сообщают вращение в рабочем режиме и определяют его неуравновешенность - фиксируют на нем нулевую точку, определяют величину и вектор радиальной нагрузки R, приведенной к оси рабочего колеса, из соотношения:
R :R -hl,lb b
где R - величина и вектор радиальной нагрузки, действующей на нижний подшипник 5 (определяется известным методом, например осциллографирова- нием).
Затем компенсируют гидравлическу неуравновешенность. увеличением уста .. новочного угла лопастей, последовательно расположенных от вектора радиальной нагрузки, и в зависимости от угла между последним и осью близ расположенной лопасти против направления вращения ротора, нд. величину, определяемую из соотношений:
57,3R-sin/(f-90% ---/
uV,
т tgv, sin з|0.
,V, Ix3R cosCL „
T.tgVysiпЗ| -
где лУ, и &V,j - соответственно увеличение установочного
5
0
5
угла первой и второй ло п а с т ей, ел едующих за вектором нагрузки против направления вращения ротора ,
R - радиальная нагрузка
от неуравновешенности, приведенная к осям лопастей рабочего колеса;
Т - тангенциальная сила,
действующая на лопасть
Ч - угол между вектором радиальной нагрузки и осью бяизрасположен- нс5й лопасти против направления вращения ротора;
V - установочный угол лопасти по среднему диаметру относительно оси вращения колеса ,
Z - число лопастей рабочего колеса.
Если ----, то производят
fj
увеличение установочного угла второй и третьей лопастей, последовательно расположенных от вектора нагрузки против направления вращения ротора на величину, определенную из Соотношений:
V,
&.v.
57,3R.sln(4-90 -н -™/
U
360°
Т. tgV,- E;in ™2ZA25l 25
Trtgv Bin lp
, соответственно увелиение установочного угла второй и третьей лопастей, следующих за вектором нагрузки против направления врадения ро гора.
При осуществлении предлагаемого способа не требуется специальной аппаратуры (д остаточно иметь хорошо
оснащенные ремонтные базы). Способ осуществляется в собственных опорах на рабочем месте в рабочем режиме гидроагрегата. Согласно способу можно определять и устранять гидравлическую неуравновещенность, значительно превышающую и часто не совпадающую по направлению с неуравновешенностью холостого хода.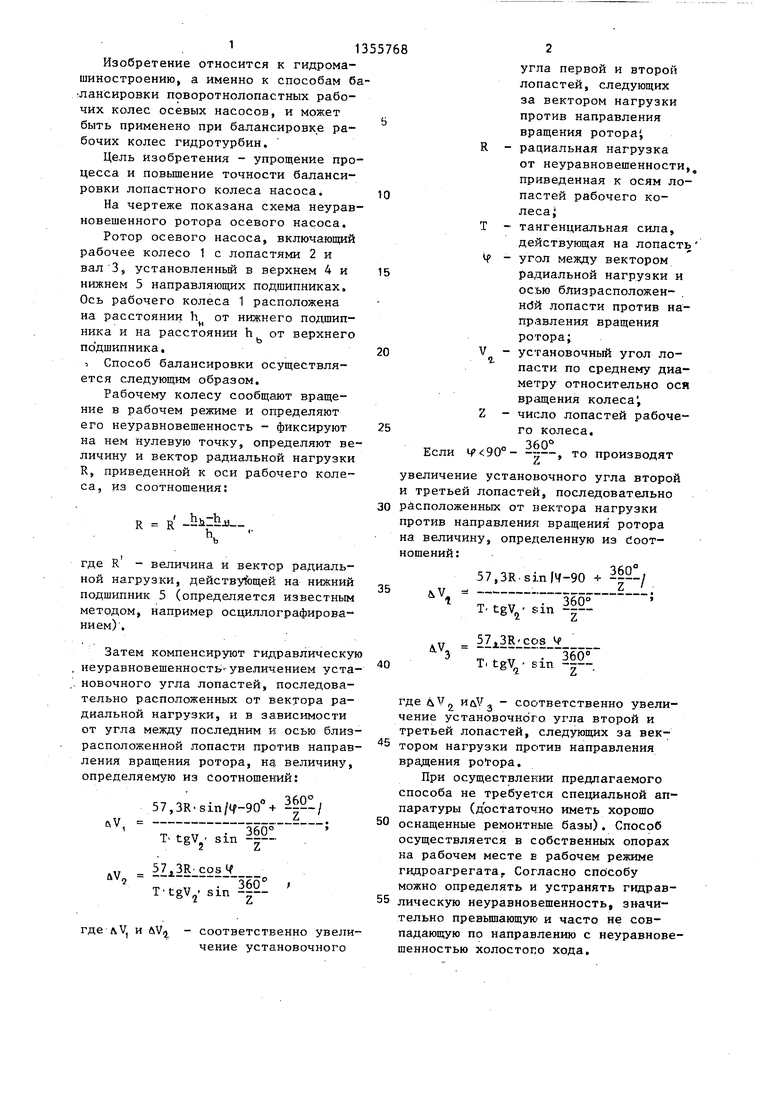
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ БАЛАНСИРОВКИ РОТОРА | 1998 |
|
RU2190128C2 |
| Способ балансировки гибкого ротора с распределенной неуравновешенностью | 1956 |
|
SU114957A1 |
| Способ сборки и балансировки высокооборотных роторов и валопроводов авиационных газотурбинных двигателей и газоперекачивающих агрегатов | 2022 |
|
RU2822671C2 |
| СПОСОБ НИЗКООБОРОТНОЙ БАЛАНСИРОВКИ МАССЫ И АЭРОДИНАМИКИ ВЫСОКООБОРОТНОГО ЛОПАТОЧНОГО РОТОРА | 2009 |
|
RU2419773C2 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОЙ БАЛАНСИРОВКИ РОТОРА | 2008 |
|
RU2426976C2 |
| Способ определения осевого дисбаланса шарового ротора | 1982 |
|
SU1033881A1 |
| Способ балансировки рабочих колес роторов турбомашин | 1984 |
|
SU1185140A1 |
| УСТРОЙСТВО ДЛЯ БАЛАНСИРОВКИ РОТОРА ВЫСОКООБОРОТНОЙ ТУРБОМАШИНЫ | 2000 |
|
RU2204739C2 |
| СПОСОБ УРАВНОВЕШИВАНИЯ РОТОРОВ СКВАЖИННЫХ ЦЕНТРОБЕЖНЫХ НАСОСОВ | 2011 |
|
RU2476844C1 |
| Способ определения жесткости направляющих подшипников двухопорных гидроагрегатов по результатам балансировки | 2022 |
|
RU2808322C2 |
| Патент США № 4253800, кл | |||
| Приспособление для автоматического тартания | 1922 |
|
SU416A1 |
| Владиславлев Л.А | |||
| Вибрация гидроагрегатов, гидроэлектрических станций | |||
| М.: Энергия, 1982, с | |||
| Способ получения камфоры | 1921 |
|
SU119A1 |
