11
Изобретение относится к машиностроению, а именно к храповым механизмам.
Целью изобретения является повьппе ние надежности за счет обеспечения постоянного контакта одной из двух собачек с храповым колесом.
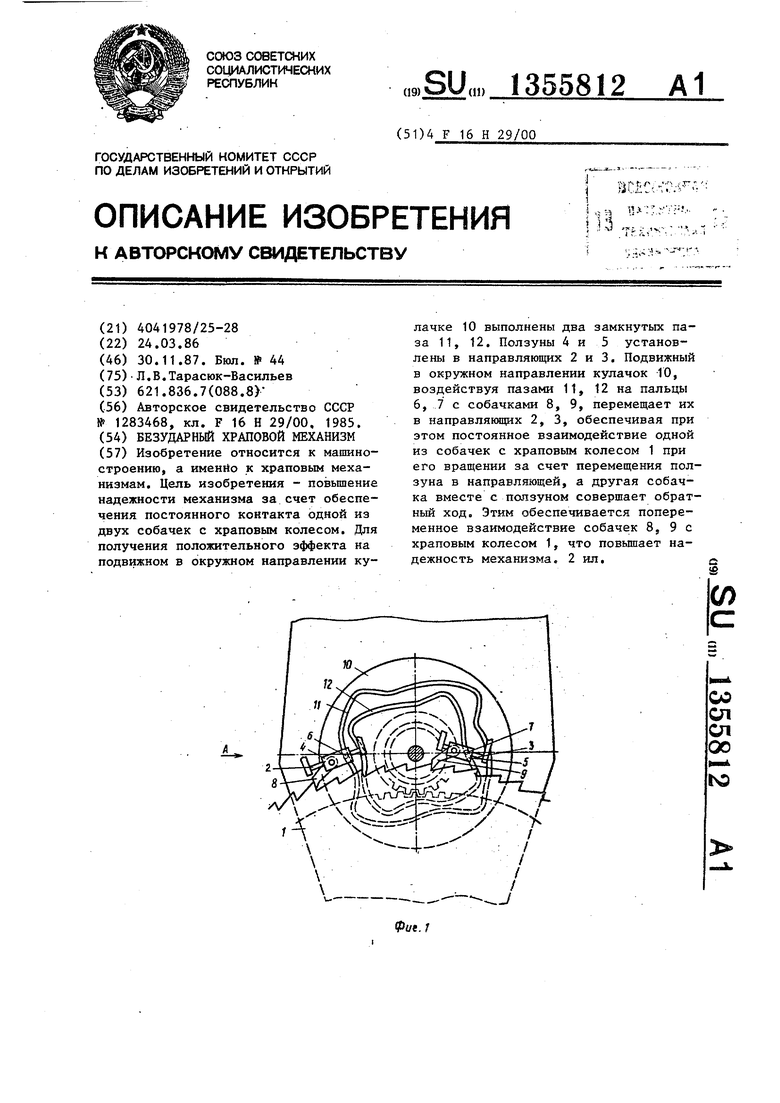
На фиг.1 изображен безударный храповой механизм, общий вид на фиг.2- вид А на фиг. 14
Безударный храповой механизм содержит храповое колесо 1, направляющие 2 и 3, размещенные в них ползуны 4 и 5 с пальцами 6 и 7 и собачками 8 9 дЛя взаимодействия с храдовым колесом 1, подвижный в окружном направлении кулачок 10 с замкнутыми пазами 11 и 12, причем один из них смещен по фазе относительно другого, для взаимодействия с пальцами 6, 7 предварительно закрученную пружину 13, связанную с кулачком 10, устройством 14 ее закручивания. ,
Безударный храповой механизм рабо- 25 °P предварительно закрученной пружины обеспечивает устройство 14 закручивания пружины.
Формула изобретения
Безударный храповой механизм, содержащий храповое колесо, направляющую, размещенный в ней ползун с пальцем и собачкой для взаимодействия с храповым колесом, подвижный в окружтает следующим образом.
Под действием предварительно закрученной пружины приводится во вращение кулачок 10, замкнутый паз 11;, воздействуя на палец б ползуна 4 с собачкой 8, перемещает его влево по направляющей 2 и собачка 8 входит ао взаимодействие с храповым колесом 1, В то же время замкнутый паз 12, воздействуя на палец 7 ползуна 5 с собачкой 9, перемещает его вправо, .выводя из зацепления с храповым колесом 1 собачку 9. Храповое колесо может вращаться только против часовой стрелки, вращению его по часовой стрелке препятствует собачка 8.
При вращении храпового колеса 1 против часовой стрелки за счет смещения замкнутых пазов 11, 12 по фазе паз 11 кулачка 10, воздействуя на па-- лец 6 ползуна 4 с собачкой 8, пере™ мещйет его влево по направляющей 2,, обеспечивая постоянное взаимодействие собачки 8 с храповым колесом 1„ а
30
40
3 ном направлении кулачок с пазом для взаимодействия с пальцем, о т л и - Ч а ю щ и и с я тем, что, с целью повьппения надежности, паз выполнен замкнутым, механизм снабжен предварительно закрученной пружиной, связанной с кулачком, устройством ее закручивания, дополнительнрй направляющей и размещенными в ней дополнительными ползуном с пальцем и собач кой, а в кулачке выполнен второй замкнутый паз коаксиальный первому и смещенный по фазе относительно первого для взаимодействия с пальцем дополнительного ползуна.
паз 12 кулачка 10, воздействуя на палец 7 ползуна 5 с собачкой 9, перемещает его вправо по направляющей 3 к ее началу. При дальнейшем вращении храпового колеса 1 кулачок 10, воздействуя пазом 12 на палец 7 ползуна 5 с собачкой 9, перемещает его по направляющей 3 влево и собачка 9 входит во взаимодействие с храповым колесом 1. В то же время замкнутый паз 11, воздействуя на палец 6 ползуна 4 с собачкой 8, перемещает его вправо, выводя из зацепления с храповым ко- с лесом собачку 8,ползун 4 совершает обратный ход по направляющей 2, а па.- лец 6 перемещается влево по направляющей 3, обеспечивая взаимодействие собачки 9 с храповым колесом 1. Далее цикл повторяется, чем обеспечивается переменное взаимодействие собачек 8, 9 с храповым колесом 1, обеспечив постоянный контакт одной из них с храповым колесом 1. Компенсацию рас0
Безударный храповой механизм, содержащий храповое колесо, направляющую, размещенный в ней ползун с пальцем и собачкой для взаимодействия с храповым колесом, подвижный в окруж0
ном направлении кулачок с пазом для взаимодействия с пальцем, о т л и - Ч а ю щ и и с я тем, что, с целью повьппения надежности, паз выполнен замкнутым, механизм снабжен предварительно закрученной пружиной, связанной с кулачком, устройством ее закручивания, дополнительнрй направляющей и размещенными в ней дополнительными ползуном с пальцем и собач кой, а в кулачке выполнен второй замкнутый паз коаксиальный первому и смещенный по фазе относительно первого для взаимодействия с пальцем дополнительного ползуна.
10
L
Редактор М.Бандура
Составитель Б.Луньков Техред Л.Сердюкова
Заказ 5764/34Тираж 804Подписное
ВНИИПИ Государствениого комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г, Ужгород, ул. Проектная, 4
Фиг. 2
Корректор В.Гирняк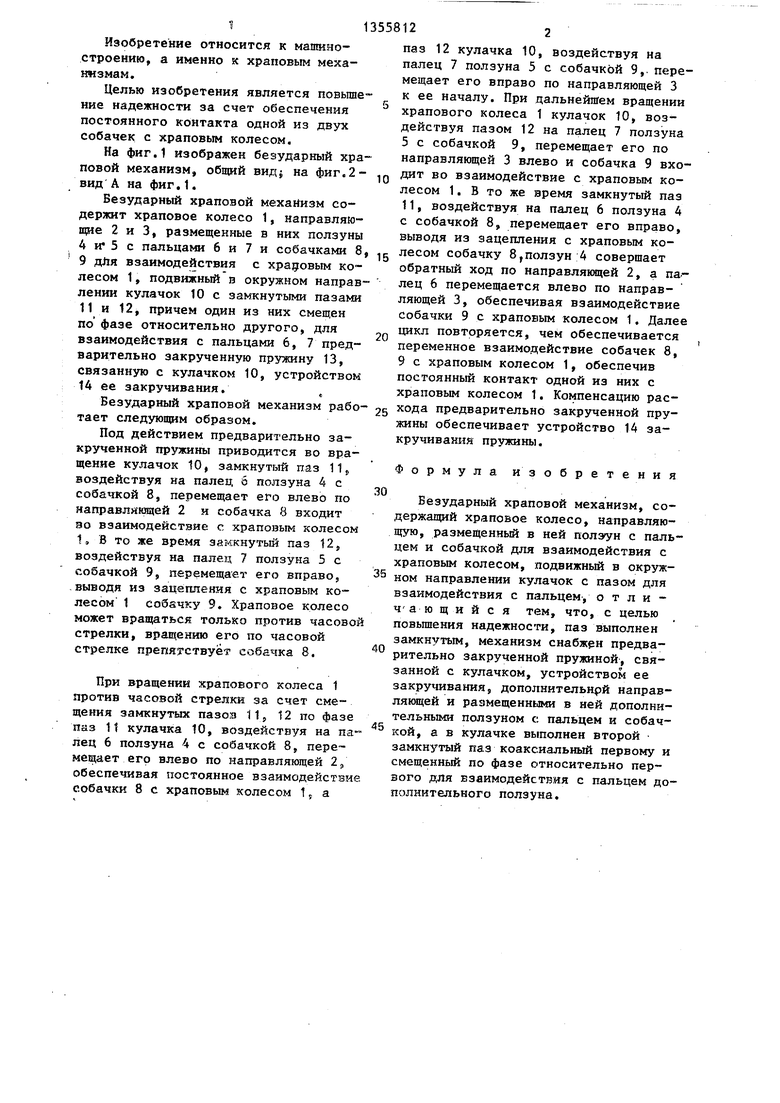
| название | год | авторы | номер документа |
|---|---|---|---|
| Храповой механизм | 1985 |
|
SU1283468A1 |
| Резьботокарный полуавтомат | 1986 |
|
SU1366330A1 |
| Манипулятор | 1985 |
|
SU1331638A1 |
| Нумератор | 1978 |
|
SU820970A1 |
| Штамп для пробивки отверстий впОлыХ дЕТАляХ | 1978 |
|
SU841723A1 |
| Кулачковый механизм | 1991 |
|
SU1796823A1 |
| Устройство управления плоскофанговой машиной | 1959 |
|
SU128966A1 |
| Устройство для гибки деталей | 1985 |
|
SU1360849A2 |
| Реверсивный храповой механизм | 1977 |
|
SU771389A1 |
| •СЕСОЮЗНАЯ ffATEHTW-TEXl'i-'JECHAH | 1973 |
|
SU381480A1 |
Изобретение относится к машиностроению, а именйо к храповым механизмам. Цель изобретения - повьппение надежности механизма за счет обеспечения постоянного контакта одной из двух собачек с храповым колесом. Для получения положительного эффекта на подвижном в окружном направлении кулачке 10 выполнены два замкнутых паза 11, 12. Ползуны 4 и 5 установлены в направляющих 2 и 3. Подвижный в окружном направлении кулачок 10, воздействуя пазами 11, 12 на пальцы 6, 7 с собачками 8, 9, перемещает их в направляющих 2, 3, обеспечивая при этом постоянное взаимодействие одной из собачек с храповым колесом 1 при его вращении за счет перемещения ползуна в направляющей, а другая собачка вместе с ползуном совершает обратный ход. Этим обеспечивается попеременное взаимодействие собачек В, 9 с храповым колесом 1, что повьппает надежность механизма. 2 ил. с со ел СП 00