Изобретение относится к общему машиностроению и может быть использовано в устройствах для получения прерьтистого движения ведомого звена.
Целью изобретения является повышение надежности.
На фиг. изображен храповой механизм с датчиком, взаимодействующим с зубьями храпового колеса, в виде гидроцилиндра со штоком (общий вид); на фиг.2 - то же, с датчиком в виде золотника.
Храповой механизм содержит храповое колесо 1 и подвижную в окружном направлении обойму 2. В обойме 2 размещены направляющие 3, по которым перемещается ползун 4 с пальцем 5. На ползуне установлена собачка 6, взаимодействующая с зубьями храповог колеса 1 и подпружиненная к последнему пружиной 7. Кроме того, в обойме размещены клачок 8-со спиральным пазом 9, взаимодействующим с пальцем 5 ползуна 4. Храповой механизм включает зубчатое колесо 10, установленное соосно кулачку 8 и жестко связан нобь с ним, рейку 11, входящую в зацепление с зубчатым колесом 10, и устройство возврата ползуна (не показано), включающее в себя датчик 112, выполненный в виде гидроцилиндра 13 со штоком 14 (фиг.1) или в виде золотника 15 (фиг.2), и исполнительный узел 16. Исполнительный узел 16 выполнен в виде гидроцилиндра 17, шток 18 которого связан с рейкой 11, а в бесштоковой полости 19 установлена пружина 20 регулируемой жесткости. Датчик 12 кинематически связан со штоковой полостью гидроцилиндра 17. Угол наклона паза 9 кулачка В к плоскости перемещения ползуна 4 меньше угла трения.
Храповой механизм работает следующим образом.
Собачка 6 под действием пружины 7 поджимается к зубьям храпового колес 1. Кроме того, под действием пружины 20 рейка 11 через зубчатое колесо 10 поворачивает кулачок В. Его спиральн паз 9 воздействует на палец 5 ползуна 4, перемещая последний по направляющим 3, тем самым постоянно, поджимая собачку 6 к опорной поверхности зуба храпового колеса 1. Таким образом, собачка 6 находится в постоянном контакте с одним из зубьев храпового колеса 1. Храповое колесо 1
834682
совершает колебательное движение с амплитудой, меньшей или равной шагу зубьев колеса. При движении храпового колеса 1 в прямом направлении обойма 2 совершает вращательное движение, так как собачка 6 не может выйти из зацепления с зубом храпового колеса 1 вследствие самозаклинивания пары, колец 5 - паз 9.
При обратном движении храпового колеса 1 шток 14 или золотник 15 датчика 12 взаимодействует с зубом храпового колеса 1, в результате чего шток 14 (или золотник 15) поднимается и перемещает рейку 11, связанную со штоком 18 гидроцилиндра 17, так как штоковая полость гидроцилиндра 17 кинематически связана с датчиком 12.
10
15
0
5
0
5
Рейка П, вращая зубчатое колесо 10, перемещает кулачок В, а следовательно, и ползун 4 с собачкой 6, связанный с кулачком 8 через палец 5 и паз 9, а в результате собачка 6 отходит от зуба храпового колеса I.
Таким образом, при обратном движении храпового колеса 1 обойма 2 не перемещается в обратном направлении. При зтом уменьшаются шум и износы собачки 6 и храпового колеса 1, так как собачка 6 не взаимодействует с зубьями храпового колеса 1.
В дальнейшем щосл работы механизма повторяется. Формула изобретения
Храповой механизм, содержащий хра- повое колесо, подвижную в окружном направлении обойму, размещенные в обойме направляю1цие, ползун с пальцем, перемещакяц ся в направляющих, собач- - ку, размещенную на ползуне, и устройство возврата ползуна, включающее датчик, взаимодействующий с зубьями храпового колеса, и исполнительный узел, отличающийся тем, что, с целью повышения надежно- сти, механизм снабжен размещенным в обойме кулачком с пазом, взаимодействующим с пальцем, зубчатым колесом, установленным соосно с кулачком, рейкой, взаимодействующей с зубчатым колесом, и пружиной, установленной в обойме и взаимодействующей с рейкой, исполнительный узел выполнен в виде е гидроцилиндра, ШТОК КОТОРОГО связан с рейкой, в бесштоковой полости установлена пружина, а датчик кинематически связан со штоковой полостью гидроцилиндра.
5
0
Составитель С.Андреев Редактор Н.Швьщкая Техред В.Кадар Корректор Е.Рошко
7409/33
Тираж 811Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д.4/5
Производственно-полиграфическое предприятие, г.Ужгород, ул.Проектная,4
(fftja.2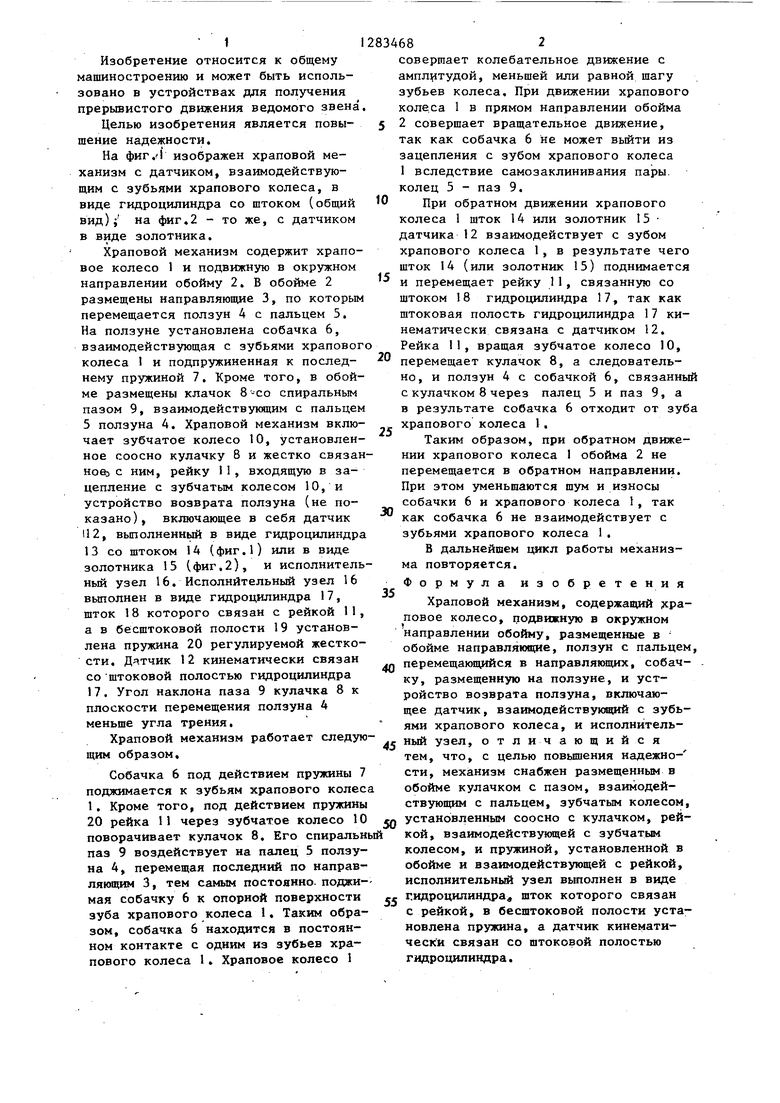
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для отделения верхней заготовки от стопы и подачи ее в зону обработки | 1981 |
|
SU946744A1 |
| Многооперационный станок для обработки щитовых деталей мебели | 1980 |
|
SU889430A1 |
| Автоматический ключ для свинчивания и развинчивания насосных штанг | 1986 |
|
SU1350325A1 |
| Станок для сборки узлов запрессовкой | 1978 |
|
SU745642A1 |
| Транспортно-технологический ротор | 1988 |
|
SU1586795A1 |
| Устройство для перфорирования и отрезки полосового и ленточного материала | 1980 |
|
SU984863A1 |
| УСТРОЙСТВО ДЛЯ ПЕРЕГРУЗКИ ИЗДЕЛИЙ, ПРЕИМУЩЕСТВЕННО ПОЛУПРОВОДНИКОВЫХ ПРИБОРОВ | 1990 |
|
RU2028698C1 |
| Гидропривод для автоматического управления работой гидроцилиндров пресса | 1983 |
|
SU1139635A2 |
| Реверсивный храповой механизм | 1977 |
|
SU771389A1 |
| ПОРШНЕВОЙ ГАЙКОВЕРТ | 2013 |
|
RU2548870C2 |
Изобретение относится к общему машиностроению и используется в устройствах для получения прерывистого движения ведомого звена. Цель изобретения - повышение надежности храпового механизма. Для этой цели храповой механизм имеет храповое колесо 1, подвижную в окружном направлении обойму 2. Б обойме размещены направляющие 3, по которым перемещается ползун с пальцем 5, Собачка ползуна 6 взаимодействует с зубьями храпового колеса 1. В обойме размещены кулачок 8 с пазом 9, зубчатое колесо 10, рейка 11 и устройство возврата ползуна. Исполнительный узел 16 выполнен из гидроцилиндра 17, шток которого связан с рейкой 11. При колебательном движении храпового колеса 1 обойма 2 совершает одностороннее вращательное движение. Механизм обеспечивает уменьшение шума в передаче и из.носов. 2 ил. i (Л ff 77 / (fua.
| Храповой механизм свободного хода | 1973 |
|
SU482585A1 |
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
| Храповый механизм | 1984 |
|
SU1201593A1 |
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
