1
Изобретение относится к судовождению, в частности к управлению движением морскими судами.
Цель изобретения - повышение экономичности управления.
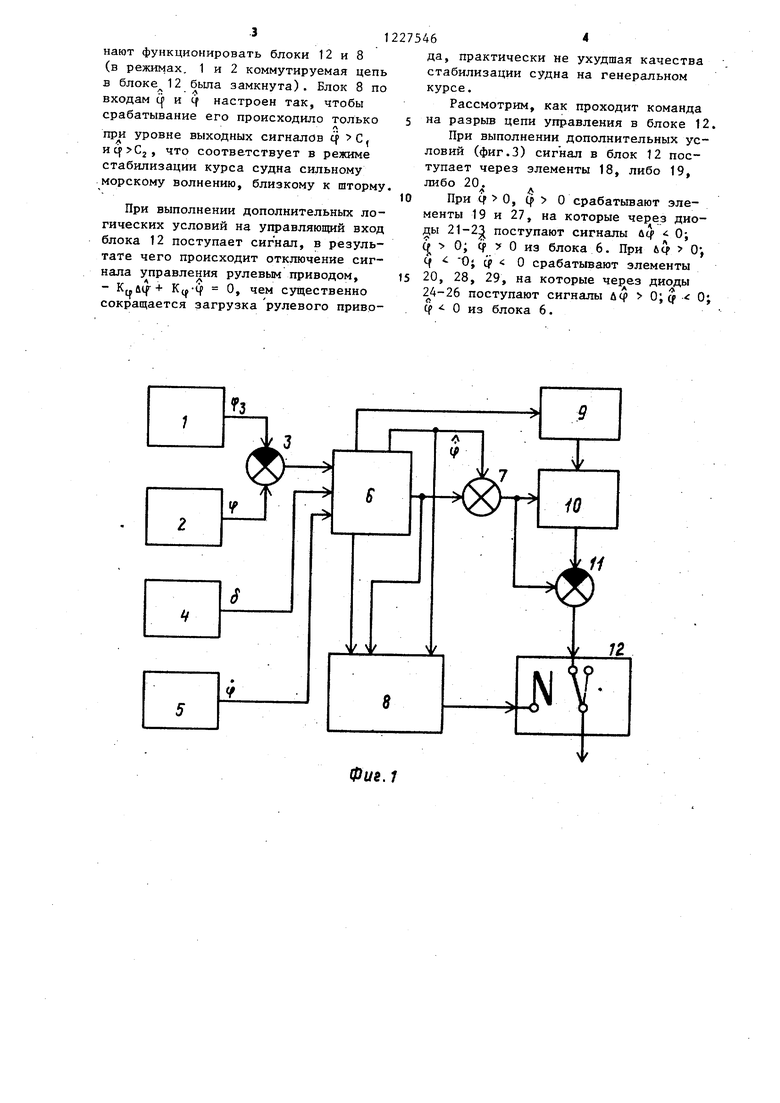
На фиг.1 приведена блок-схема устройства; на фиг. 2 - блок-схема блока моделирования динамики движения судна; на фиг.З - принципиальная схема блока анализа динамики движения судна.
Устройство (фиг.1) содержит блок определения рассогласования по кур
оценки cf (uqi), которые через сумматоры 7 и 11 поступают в виде команд 10 управления через нормально замкнутый контакт блока 12 коммутации на вход рулевого привода. В результат произойдет перекладка руля, информа ция о которой поступит с датчика 4
су, состоящий из задатчика 1 курса, ,„
„ .„ ,, в блок 6, где произойдет отработка
датчика 2 курса и элемента 3 сравне- э
ния, датчик 4 угла перекладки руля и блок 5 определения производной курса. К выходам последних подключен блок 6 моделирования движения судна, первый и второй выходы которого под20
uqi к нулю, когда судно вернется на прежний курс, т.е. йср 0. Так осу ществляется стабилизация курса суд по закону (1).
2. Море слабо штормит (, , ), где if - вторая производная курса; С, Сг- уставки.
ключены к входам сумматора 7 и первому и второму входам блока 8-анализа динамики- движения судна, третий вход которого соединен с третьим
2. Море слабо штормит (, , ), где if - вторая производная курса; С, Сг- уставки.
В этом случае отличие в работе системы по сравнению с законом (1)
f , - будет в том, что в блоке 6 появится выходом блока 6. Четвертый выход бло- / / jrv
..-.сигнал неувязки w-(), величина
ка 6 и выход сумматора 7 подключены
которо го сутцественно изменит коэффициент усиления сигналов, угла рас согласования по курсу и его производной в соответствии с зависимостью
к входам умножителей 9 и 10, соединенных последовательно и образующих блок изменения коэффициента передачи сигнала. Выход умножителя 10 подклю- чен к одному входу второго сумматора 11,выход которого связан с сигнальным входом блока 12 коммутации, к управляющему входу которого подключен выход блока 8.
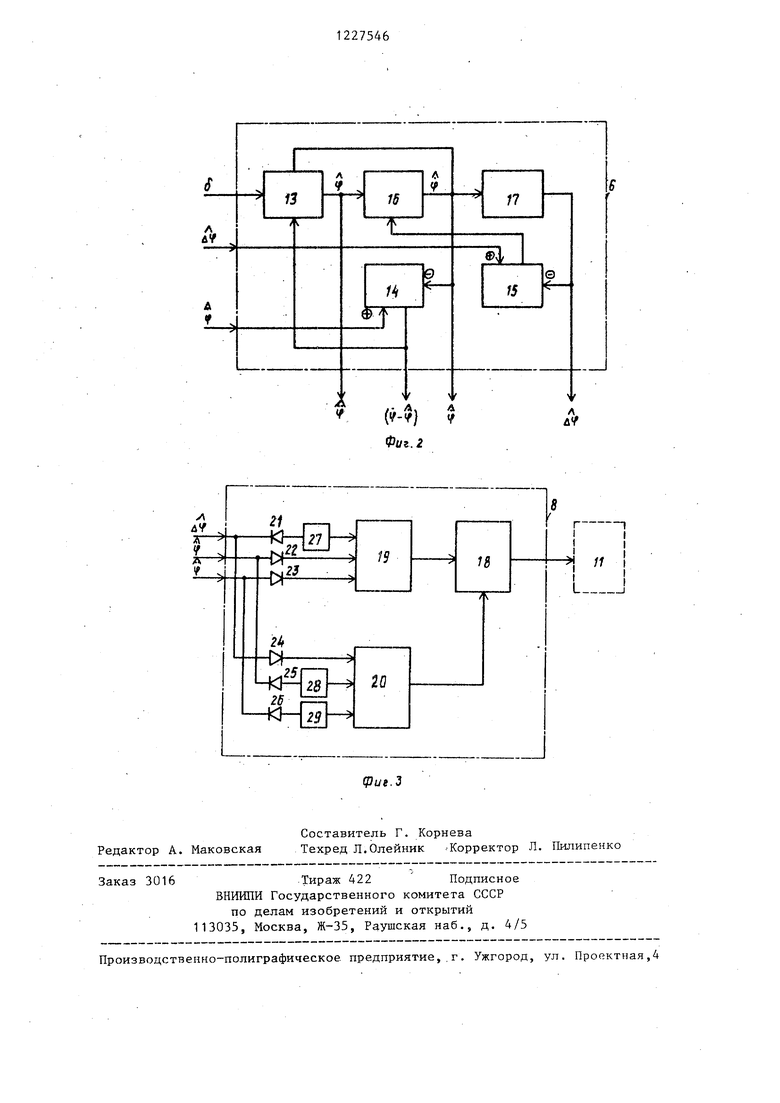
Блок 6 (фиг.2) содержит сумматоры 13, 14 и 15 и интегрирующие усилители 16 и 17, а блок 8 (фиг.З) содержит на выходе элемент ИЛИ 18,
подключенные к нему элементы И 19,20, 40 которое вычитается из основного сиг13ХОДЫ которых через диоды 21-23 и 24-26 и инверторы 27,28 и 29 подключены к входам блока.
нала управления рулевым приводом в сумматоре 11. Полученная разность сигнала поступает через нормально замкнутые контакты блока 12 на вход Устройство работает в трех режи- рулевого привода. Уменьшение коэфмах следующим образом.
1 . Спокойное море (ср-4 0), где q угловая скорость курса; q -оценка угловой скорости курса.
фициента усиления на величину дисперсии сигнала рассогласования (if-)2 позволяет удерживать судно на геренальном курсе и существенно сокУправление рулевым приводом судна у ратить загрузку рулевого привода,
осуществляется по зависимости
3. Режим управления рулевым пр водом при сильном волнении на мор Признаком сильного волнения являе выполнение условий
8 + K(;fuq) ,
л ЛСр
-скорость перекладки руля;
-оценка сигнала рассогласования по курсу
-коэффициент.
При отклонении судна от заданного курса в датчике 2 и блике 5 изменяется величина сигнала лср и ср. Оба сигнала поступают на вход блока 6, в результате на его выходе вьфа- батываются сигналь; - измененные
оценки cf (uqi), которые через сумматоры 7 и 11 поступают в виде команды управления через нормально замкнутый контакт блока 12 коммутации на вход рулевого привода. В результате произойдет перекладка руля, информация о которой поступит с датчика 4
,„
uqi к нулю, когда судно вернется на прежний курс, т.е. йср 0. Так осуществляется стабилизация курса судна по закону (1).
2. Море слабо штормит (, , ), где if - вторая производная курса; С, Сг- уставки.
В этом случае отличие в работе системы по сравнению с законом (1)
которо го сутцественно изменит коэффициент усиления сигналов, угла рассогласования по курсу и его производной в соответствии с зависимостью
( , (2)
где К - коэффициент.
Сигнал (cf-ti ) с выхода блока 6 поступает через умножитель 9 на первый вход умножителя 10, на второй вход которого поступает сигнал вида (ai| +Cf), на выходе умножителя 10 будет произведение вида К(с| -ср)2, (лср fff)
фициента усиления на величину дисперсии сигнала рассогласования (if-)2 позволяет удерживать судно на геренальном курсе и существенно сок
3. Режим управления рулевым приводом при сильном волнении на море. Признаком сильного волнения является выполнение условий
.q с,, cj С2 .
В этом случае дополнительно к уже описанным блокам и связям начи31
нают функционировать блоки 12 и 8 (в режимах. 1 и 2 коммутируемая цепь
в блоке 12 была замкнута). Блок 8 по
о / входам cj) и cf настроен так, чтобы
срабатывание его происходило только
л
щзи уровне выходных сигналов ср С, , что соответствует в режиме стабилизации курса судна сильному морскому волнению, близкому к шторму
При выполнении дополнительных логических условий на управляющий вход блока 12 поступает сигнал, в результате чего происходит отключение сигнала управления рулевым приводом, - Kj.aif + К{.-ц О, чем существенно сокращается загрузка рулевого приво7546
да, практически не ухудшая качества стабилизации судна на генеральном курсе.
Рассмотрим, как проходит команда 5 на разрыв цепи управления в блоке 12.
При выполнении дополнительных условий (фиг.З) сигнал в блок 12 поступает через элементы 18, либо 19, либо 20.
Л V
10 При tf о, (JP о срабатывают элементы 19 и 27, на которые через дио- ы 21-2 поступают сигналы &if 0; 0; ср О из блока 6. При лд 0; Ч Oj cf О срабатьшают элементы
15 20, 28, 29, на которые через диоды 24-26 поступают сигналы uq 0; - 0; Cf - О из блока 6.
| название | год | авторы | номер документа |
|---|---|---|---|
| Авторулевой | 1975 |
|
SU540258A1 |
| Авторулевой | 1981 |
|
SU1095803A1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА С УЧЕТОМ ВОЛНЕНИЯ | 2011 |
|
RU2499727C2 |
| АППАРАТУРА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА | 1999 |
|
RU2155142C1 |
| Система управления движением судна с дублированием каналов курса и резервным управлением по курсу | 2017 |
|
RU2660193C1 |
| АППАРАТУРА УПРАВЛЕНИЯ ДВИЖЕНИЕМ КОРАБЛЯ ПРИ ВОЛНЕНИИ | 2009 |
|
RU2392181C1 |
| Устройство для перестройки параметров авторулевого | 1974 |
|
SU528546A1 |
| АППАРАТУРА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА | 1998 |
|
RU2144884C1 |
| СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА | 2009 |
|
RU2388650C1 |
| СПОСОБ ОТКАЗОУСТОЙЧИВОГО УМЕРЕНИЯ КРЕНА СУДНА НА ПОДВОДНЫХ КРЫЛЬЯХ | 2013 |
|
RU2531999C1 |
Фиг. 1
Редактор А. Маковская
Составитель Г. Корнева
Техред Л.Олейник --Корректор Л. Пилипенко
Заказ 3016Тираж 422 Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие,,г. Ужгород, ул, Проектная,4
| Авторулевой | 1977 |
|
SU651321A2 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
