Изобретение относится к устройствам автоматического управления движе-- нием судна и предназначено для точного автоматического удержания научно- исследовательского судна (НИС) на за-. данной линии геофизического профиля при производстве геолого-геофизических исследований на морских акваториЯХ i,
w f
Известно устройство автоматического управления рулевой установкой и удержания судна на заданном курсе с помощью авторулевого, содержащее датчики требуемого значения курсового угла и его истинного значения, схему . сравнения, исполнительное устройство и рулевую машину, управляющую рулем.
Недостатки - отсутствие показаний ; координат местонахождения судна, и необеспеченность точности удержания судна на линии профиля.
Известна также автоматизированная система стабилизации судна на заданной линии профиля, содержащая радионавигационный датчик курса, скорости,; отклонения судна от заданного курса, первый блок сравнения, второй блок сравнения, регулятор курса, исполнительный механизм. Такая система обеспечивает необходимую точность привяз- ки судна к линии геофизического профиля при решении ряда геолого-геофизических задач, однако в ней не исключается возможность колебаний курса судна.Наиболее близким к предлагаемому является устройство для автоматической стабилизации судна с буксируемой сейсмокосой на заданной траекторий, содержащее задатчик ширины коридора хода судна, датчики курса, скорости, отклонения судна от заданного курса, вычислитель градусных поправок, дат(Я
с
О
00
ел
чик максимального натяжения сейсмической косы, датчики внешних возмущений, два блока сравнения, блок памяти, сумматор, задатчик курса, регулятор курса и исполнительный механизм.
Данное устройство позволяет выработать управляющий сигнал для управления судном, однако в нем отсутствуют необходимые элементы согласования между.выходным блоком навигацией- ного вычислителя сигнала рассогласования и регулятором курса (авторулевым) , что ограничивает применение этого, устройства на судах с различнми модификациями авторулевых.
Цель изобретения - повышение, точности и расширение области применени устройства.
Поставленная цель достигается тем, что устройство автоматического управления курсом судна, содержащее навигационный вычислитель курса, бло управления рулем и блок изменения курса, дополнительно содержит последовательно соединенные сумматор, бло сравнения, блок управления шаговым двигателем и шаговый двигатель, кинематически связанный через редуктор с сельсином-датчиком, а также переключатель рода работы, первый и второй преобразователи разность фаз - код, входы фазы опорного сигнала которых и вход фазы опорного сигнала сельсина-датчика подключены к выходу фазы опорного сигнала датчиков курса, ко второму входу блока сравнения подключен выход первого преобразователя разность фаз - код информационный вхо которого подключен к первому выходу фазы сельсина-датчика, второй выход фазы которого через первый контакт переключателя рода работы соединен с входом блока управления рулем, причем выход навигационного вычислителя курса подключен к первому входу сумматора , со вторым входом которого связан выход второго преобразователя разность фаз - код, информационный вход которого подключен к информационному выходу блока измерения курса, выход ручного управления которого через второй контакт переключателя рода работы соединен со входом блока у равления рулем.
I
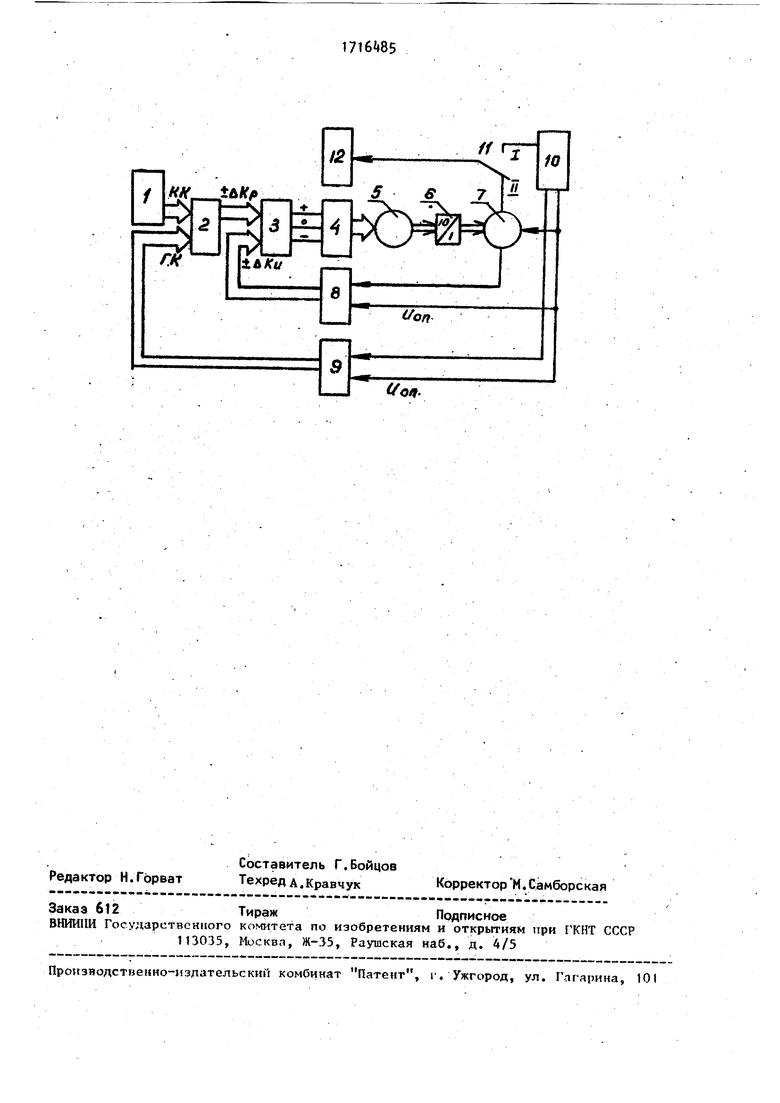
На чертеже приведена структурная
электрическая схема устройства.
Устройство автоматического управления курсом судна содержит навигационный вычислитель курса 1, сумматор 2, блок сравнения 3, блок управления шаговым двигателем 4, шаговый двигатель 5, редуктор 6, сельсин-датчик 7, два преобразователя разность, фаз-код 8 и 9, блок измерения курса 10, переQ ключатель рода работы 11, блок управления рулем 12.
Один вход сумматора 2 соединен с выходом навигационного вычислителя курса 1, а второй вход через преобра5 зователь разность фаз - код 9 с блоком измерения курса 10. Выход сумматора, 2 подключен к блоку сравнения 3, на .другие входы которого через преобразователь разность фаз - код 8 под0 ключей выход сельсина-датчика 7. Блок сравнения 3 череа блок управления шаговым двигателем А соединен с шаговым двигателем 5, а последний механически через редуктор 6 соединен с
5 сельсин-датчиком 7- Выход сельсина- датчика 7 через переключатель рода работы 11 соединен с блоком управления рулем 12.
Устройство работает следующим об0 разом.
При отклонении судна от линии геофизического профиля навигационный вычислитель курса 1 вырабатывает управляющий сигнал в виде цифрового
„ кода, эквивалентного расчетному компасному курсу судна, для вывода его на заданную точку траектории сближения с линией географического профиля. Вычисление текущего значения расчет0 ного компасного / курса выполняется путем соответствующей обработки данных бортовых приемоиндикаторов различных радионавигационных систем с помощб ю специальных микропрограмм ре5 ального времени, введенных в навигационный вычислитель курса 1. С выхода навигационного вычислителя курса 1 значение расчетного компасного курса (КК) в виде цифрового кода подад ется на первый вход сумматора 2. На второй вход сумматора 2 подается цифровой сигнал с выхода преобразователя разность фаз т код 9, значение которого пропорционально углу рассогласования
фазы электрического сигнала в системе передачи курса от блока измерения курса 10. Опорный и фазовый сигнал сельсинной системы передачи курса подключены на входе преобразователя
51
разность фаз - код 9. Значения компасного и гирокомпасного курсов вырабатываются в круговой системе отсчета курса от 0 до 360°. С выхода сумма- тора 2 цифровой код, пропорциональ- ный расчетному углу рассогласования &«р ГК-КК, по шинам данных подается на один из входов блока сравнения 3, на второй вход которого подключен цифровой выход .преобразователя разность фаз - код 8. В свою очередь на один из входов преобразователя разность фаз - код 8 подан- опорный сигнал системы блока измерения курса 10, подключенный параллельно с одношин- ной линией связи с преобразователем разность фаз - код 9, а второй вход преобразователя Ь подключен к фазово обмотке сельсина-датчика 7, который параллельно подается на вход сельсина-приемника блока управления рулем 12 через переключатель рода работы 11. Преобразователь разность фаз- код 8 работает в полукруговой систе- ме отсчета угла рассогласования ис-
полнительной схемы устройства Ки i(0-l80°). С выхода блока cpaBHet ния 3 снимается трехстабильный сигнал параметра рассогласования Р (+), (0), (-), который по трем сигнальным линиям подается на вход блока управления,шаговым двигателем V, который управляет шаговым двигателем 5. В зависимости от знака параметра рассогласования Р вырабатываются управляющие сигналы соответствующего направления вращения шагового двигателя 5 который через понижающий мерасширения, области применения, он дополнительно содержит последоват но соединенные сумматор, блок сра
нения, блок управления шаговым дв гателем и шаговый двигатель, кине тически связанный через редуктор
30 сельсином-датчиком, а также перек чатель рода работы и первый и вто преобразователи разность фаз-код, ды фазы опорного сигнала которых вход фазы опорного сигнала сельси
35 датчика подключены к выходу фазы опорного сигнала датчика курса, к второму входу блока сравнения под ключен выход первого преобразовате ля разность фаз-код, информационны
,. т--- .--,-,, к -,...„-,..„. ...
ханйческий редуктор 6 передает враще- 4Q вход которого подключен к первому
ние его вала на ротор сельсина-датчика 7, вращение которого вызывает изменение фазы сигнала рассогласования и соответствующие изменения угла AKj, и задание угла сближения с профилем на блок управления рулем ..1.2 Остановка следящей системы рассогласования курса произойдет в момент, когда ЛКр-ДКм 0, при этом на блок измерения курса 10 будет подан курс приведения судна на географический профиль. Регулятор блока управления рулем 12 устанавливается на курс 0м, тогда при равенстве знамений ГК и ККдКр 0 и отработки следящей
выходу фазы сельсина-датчика, втор выход фазы которого через первый к такт переключателя рода работы сое нен с входом блока управления руле
45 причем выход навигационного вычисл теля курса подключен к первому вхо ду сумматора, с вторым входом кото рого связан выход второго преобразователя разность фаз-код, информа
50 онный вход которого подключен к ин формационному выходу блока измерен курса, выход ручного управления ко торого через второй контакт перекл чателя рода работы соединен с вход
55 блока управления рулем.
6
схемы на вход блока управления рулем 12 с сельсина- датчика 7 будет задан курс О и судно будет лежать на КК приведения на профиль или на профиле (при отсутствии внешних возмущений), а руль - в диаметральной плоскости судна. Переключателем рода работы 11 следящий вход блока управления рулем 12 может быть отключен от устройства автоматического управления и подключен к его штатной схеме управления от судового блока измерения курса.
Формула и ,з обретения
Устройство автоматического управления курсом судна, содержащее навигационный вычислитель курса, блок управления рулем и блок измерения курса, отличающееся тем, что, с целью повышения точности и
расширения, области применения, оно дополнительно содержит последовательно соединенные сумматор, блок сравнения, блок управления шаговым двигателем и шаговый двигатель, кинематически связанный через редуктор с
сельсином-датчиком, а также переключатель рода работы и первый и второй преобразователи разность фаз-код, входы фазы опорного сигнала которых и вход фазы опорного сигнала сельсинадатчика подключены к выходу фазы опорного сигнала датчика курса, к второму входу блока сравнения подключен выход первого преобразователя разность фаз-код, информационный
,. т--- .--,-,, к -,...„-,..„. ...
вход которого подключен к первому
выходу фазы сельсина-датчика, второй выход фазы которого через первый контакт переключателя рода работы соединен с входом блока управления рулем,
причем выход навигационного вычислителя курса подключен к первому входу сумматора, с вторым входом которого связан выход второго преобразователя разность фаз-код, информационный вход которого подключен к информационному выходу блока измерения курса, выход ручного управления которого через второй контакт переключателя рода работы соединен с входом
блока управления рулем.
10
UQ«.
| название | год | авторы | номер документа |
|---|---|---|---|
| АППАРАТУРА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА | 2002 |
|
RU2221728C1 |
| АВТОРУЛЕВОЙ С ОЦЕНКОЙ УГЛОВОЙ СКОРОСТИ | 2004 |
|
RU2269451C1 |
| Стабилизатор "нева" курса речных судов | 1976 |
|
SU615456A1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ МАГНИТНОГО СКЛОНЕНИЯ НА МОРЕ | 1990 |
|
RU2069876C1 |
| АППАРАТУРА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА | 2003 |
|
RU2223197C1 |
| МАГНИТНЫЙ КОМПАС | 2008 |
|
RU2372587C1 |
| АВТОРУЛЕВОЙ СУДНА | 2009 |
|
RU2410282C1 |
| АППАРАТУРА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА | 2002 |
|
RU2211172C1 |
| АВТОРУЛЕВОЙ, РЕАЛИЗУЮЩИЙ ПРОПОРЦИОНАЛЬНО- ИНТЕГРАЛЬНО-ДИФФЕРЕНЦИАЛЬНЫЙ ЗАКОН УПРАВЛЕНИЯ | 1968 |
|
SU213943A1 |
| УСТРОЙСТВО ИСКЛЮЧЕНИЯ СТОЛКНОВЕНИЯ СУДНА С ВСТРЕЧНЫМ ДВИЖУЩИМСЯ ОБЪЕКТОМ | 2008 |
|
RU2383464C1 |
Изобретение относится к системам автоматического управления и может быть использовано для управления движением судна вдоль заданной линии геофизического профиля при производстве геолого-геофизических исследований на морских акваториях Целью изобретения является повышение точности и расширение области применения системы управления курсом судна. Указанная цель достигается путем подключения к аналоговой схеме ручного управления курсом с сельсинным входом через схему сопряжения цифрового навигационно- , го вычислителя курса. 1 ил.
| Авторское свидетельство СССР №692396, кл | |||
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Устройство для автоматической стабилизации судна с буксируемой сейсмопьезокосой на заданной траектории | 1978 |
|
SU744484A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Шеститрубный элемент пароперегревателя в жаровых трубках | 1918 |
|
SU1977A1 |
