1
магистралью, в которой постоянно поддерживается небольшое Избыточное давИэобретение относится к горному машиностроению и может быть использовано в шахтньк манипуляторах, преимущественно в условиях разработки тонких пластов полезного ископаемого.
Целью изобретения является расширение технологических возможностей при работе манипулятора в стесненных рабочих зонах за счет увеличения угла-ю звеном 18 поворачивается на угол а/ поворота вед.омого звена.против часовой стрелки (пунктирная
На фиг.1 показан предлагаемый при- линия).
вод, общий вид;на фиг.2 - разрез При необходимости поворота ведомо- А-А на фиг,1.го звена в обратном направлении ра Привод содержит корпус 1, который 15 бочую полость силового цилиндра 4 прикрепляется к основанию горной ма- соединяют со сливной магистралью, а
ление, достаточное для выбора люфтов в з убчатых зацеплениях. Движущее усилие силового цилиндра 4 передается . через зубчатое колесо 7 на венец ведомого зубчатого колеса, которое вместе с выходными валом 8 и ведомым
шины посредством кронштейна 2, нижний и верхний силовые цилиндры 3 и 4, основное зубчатое колесо 5, дополнительные зубчатые колеса 6 и 7. Зубчатое колесо 5 неподвижно соединено с выходным валом 8 с помопдью шпонки 9. Выходной вал 8 посажен в корпус 1 на подшипниках 10 и 11 качения.
Зубчатые колеса 7 и 6 посредством подшипников 12 качения посажены на общую промежуточную ось 13, которая установлена в корпусе 1 между силовыми цилиндрами и выходным валом 8. Каждый из силовых цилиндров содержит (фиг.2) шток 14, поршень 15 и зубчатую рейку 16. Концы корпуса каждого силового цилиндра выполнены с цилиндрическими поясками 17. Оба дополнительных зубчатых колеса находятся в зацеплении с- основным зубчатым колесом 5, но каждое из них - только с одной зубчатой рейкой. К ведомому звену 18 манипулятора неподвижно прикреплены проушины 19 и 20, которые неподвижно соединены с помощью шлицев с концами выходного вала 8.
Привод работает следующим образом В исходном состоянии, когда манипулятор готов, к работе, но еще не поступил управляющий сигнал на перемещение ведомого звена, -рабочее тело (жидкость или газ) заперто в рабочих полостях обоих силовых цилиндров, поэтому повороты ведомого звена заблокированы в любом направлении.
При подаче управляющего сигнала рабочая полость одного из силовых цилиндров, например 4, через распределительное устройство (не показано) сообщается с напорной магистралью, в это же время рабочая полость силового цилиндра 3 сообщается со сливно
13572232
магистралью, в которой постоянно держивается небольшое Избыточное .
звеном 18 поворачивается на угол а/ против часовой стрелки (пунктирная
ление, достаточное для выбора люфтов в з убчатых зацеплениях. Движущее усилие силового цилиндра 4 передается . через зубчатое колесо 7 на венец ведомого зубчатого колеса, которое вместе с выходными валом 8 и ведомым
рабочую полость силового цилиндра 3- с напорной магистралью.
Добавление к известному приводу блока паразитных шестерен увеличивает расстояние L от оси силового ци- линдра до оси выходного вала (фиг.2). Благодаря этому корпус 1 может иметь Т-образную форму. Это, в свою очередь, позволяет увеличить угол поворота ведомого звена 18 в обе стороны от среднего положения (в конкретном варианте исполнения ), сохранив лишь небольшой монтажный зазор Л между ведомым звеном и корпусом во. всех фазах поворота. При этом-достигается минимальная длина проушин,.
Формула изобретения
Манипулятор, содержащий привод относительного поворота звеньев, корпус, две зубчатые рейки, жестко сзя занные с силовыми цилиндрами одностороннего действия, размещенными в корпусе, и основное зубчатое.колесо, неподвижно закрепленное на валу ведомого звена с возможностью поворота, относительно корпуса, о т л и ч а ю- щ и -и с я тем, что, с целью расширения технологических возможностей при работе манипулятора в стестенных рабочих зонах за счет увеличения поворота звеньев, он снабжен двумя дополнительными зубчатыми колесами, установленными на дополнительно введенной промежуточной оси между зубчатыми, рейками и основным зубчатым колесом, при этом каждое дополнительное зубчатое колесо входит в зацепление с основньм зубчатым колесом и с соответствующей зубчатой рейкой.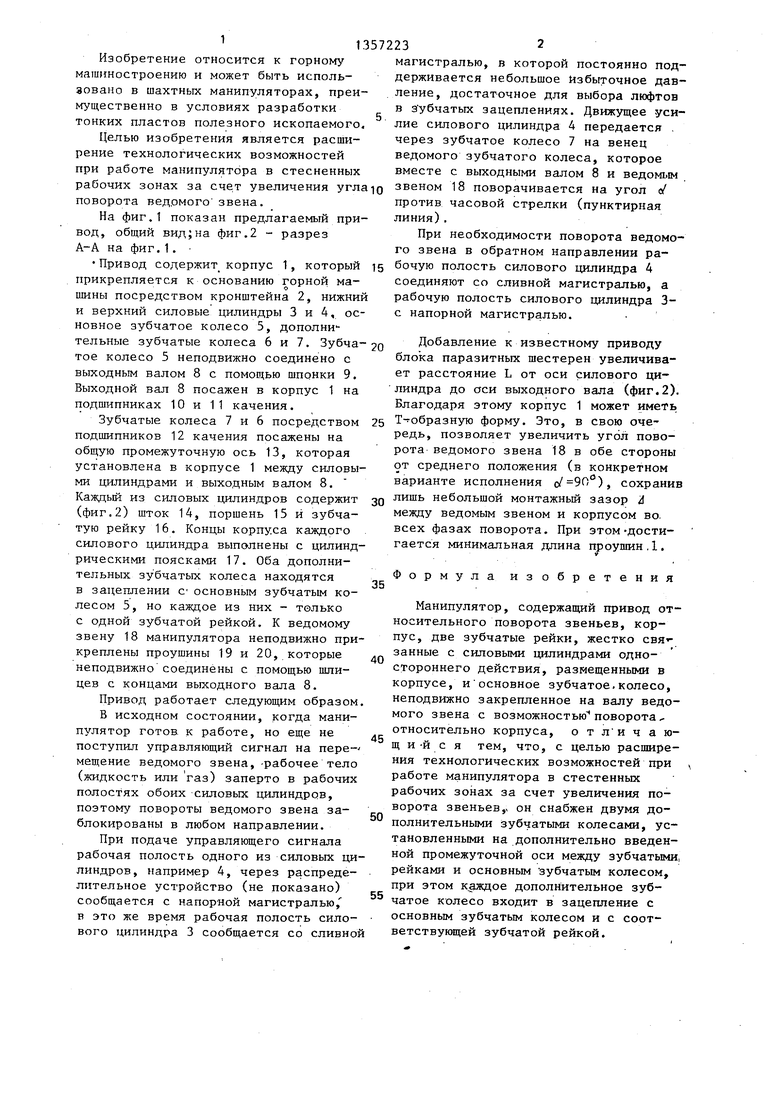
| название | год | авторы | номер документа |
|---|---|---|---|
| Привод манипулятора | 1985 |
|
SU1293018A1 |
| Шарнир манипулятора | 1984 |
|
SU1184667A1 |
| Шарнир манипулятора | 1979 |
|
SU977154A1 |
| Двигатель поршневой поворотный | 1984 |
|
SU1335736A1 |
| ПРИВОД ИНСТРУМЕНТА | 1996 |
|
RU2111392C1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОЙ РЕГУЛИРОВКИ ТОРМОЗА ПРЕИМУЩЕСТВЕННО ТРАНСПОРТНОГО СРЕДСТВА | 1991 |
|
RU2091626C1 |
| Манипулирующее устройство | 1985 |
|
SU1342722A1 |
| Следящий привод | 1986 |
|
SU1380932A1 |
| Модуль промышленного робота | 1986 |
|
SU1335454A1 |
| РЕДУКТОР С САТЕЛЛИТАМИ С НАРУЖНОЙ РЕЗЬБОЙ И ШАРНИР, СОДЕРЖАЩИЙ ТАКОЙ РЕДУКТОР | 2021 |
|
RU2760068C1 |
Изобретение относится к горному машиностроению и может быть использовано в шахтных-манипуляторах/преимущественно в условиях разработки тонких пластов полезного ископаемого. Целью изобретения является расширение технологических возможностей при работе манипулятора в стесненных рабочих зонах за счет увеличения угла поворота ведомого звена. В исходном положении рабочее тело (жидкость или газ) заперто в рабочих полостях обоих силовых цилиндров 4 и 3, позтому поворот ведомого звена 18 заблокирован. При подаче управляющего сигнала в рабочую полость силового цилиндра 4 рабочее тело поступает под давлением. Рабочая полость цилиндра 3 сообщается со сливной магистралью, в которой постоянно поддерживается избыточное давление, достаточное для выбора люфтов в зубчатых зацеплениях. Движущее усилие цилиндра 4 передается через дополнительное зубчатое колесо 7 на основное зубчато е колесо 5, которое вместе с валом 8, жестко закрепленным на ведомом звене 18, поворачивается на определенный угол. Реверсивное движение осуществляется в обратном порядке. 2 ил. с в ел 3 1 77 S СО СП ND ND СО iplfl.l Г9
Редактор А. Ворович .
Составитель А. Уваров
Техред Л.Сердюкова Корректор М, Шароши
Заказ 5931/13 Тираж 952 Подписное ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д . 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
| Жавнер В.Л | |||
| и Крамской Э.И | |||
| Погрузочные манипуляторы, Л.: Машино | |||
| строение, 1975, с.59-60. |
