Изобретение относится к машиностроению, а именно к робототехнике, и может быть использовано для перемещения рабочих органов роботов и манипуляторов.
Цель изобретения - повышение на-i. дежности за счет исключения ударов на конечных участках поворота последующего звена.
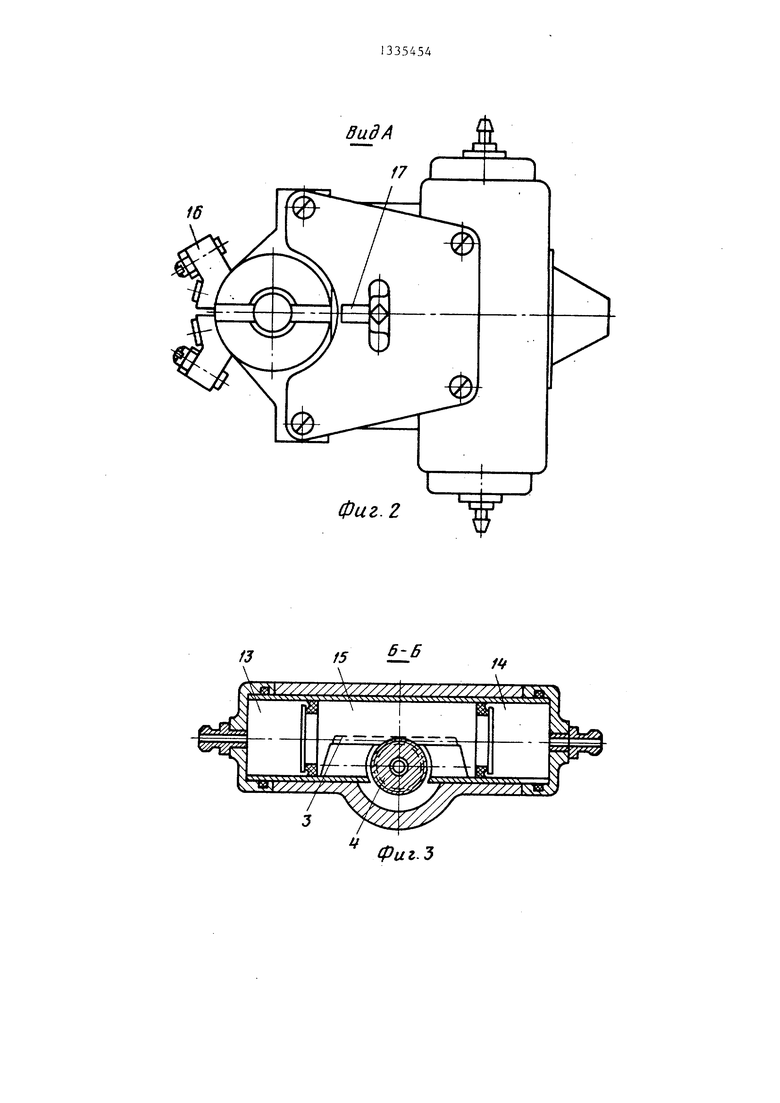
На фиг, 1 показан модуль, общий вид, разрез; на фиг, 2 - вид А на фиг, 1; на фиг, 3 разрез Б-Б на фиг, 1; на фиг, 4 - разрез на фиг, 1.
Модуль содержит предыдущее 1 и последующее 2 звенья, кинематически связанные между собой с помощью рейки 3, находящейся в зацеплении с зубчатым, колесом 4, на фланце 5 которог смонтирован кривошип 6, размещенный в поперечном пазу 7 зубчатой рейки 8| которая, в свою очередь, находится в зацеплении с зубчатым венцом 9, выполненным на последующем звене 2„ Эксцентриситет кривошипа 6 регулируется с помощью винта 10 и фиксируется винтом 11, Переходяпдам звеном между кривошипом 6 и пазом 7 рейки является ползун 12. В пpeд)Iдyщeм эвене 1 15азмещены два силовых цилин- дра 3 и 14 одностороннего действияj на общем поршне 15 которых вьшолне- на рейка 3, На звене 2 установлены регулируемые упоры 16, взаимодействующие с неподвижным упором 17 на звене 1 ,
Модуль работает следуюпщм образом.
Вращением винта 10 настраивается величина эксцентриситета кривоиш- па 6р .чем регулируется длина хода рейки 8, равная 2е., Подачей рабочего тела в цилиндр 13 поршень 15 перемещается и рейкой 3 поворачивает зубчатое колесо 4 с кривошипом 6, Длина
5
о
рабочего хода поршня 15 соответствует повороту колеса 4 на угол 180, Кривопип 6 через ползун 12 перемещает рейку 8j которая поворачивает зубчатый венец 9 в последующее звено 2, Угол поворота колеса определяется длиной хода рейки 8, Движение ползуна 12 вдоль паза 7 в рейке 8 обеспечивает ее перемещение со скоростью, изменяющейся по синусоидальному закону.
Упоры 16 служат для повышения точности позиционирования звена 2 в крайних положениях.
При подаче рабочего тела в цилиндр 14 звено 2 )зозвращается в исходное положение,
О р И у Л а
3 обретения
Модуль промышленного робота, содержащий предадущее и поворотное относительно него последующее звенья кинематически связанные между собой с помощью основной зубчато-реечной передачиJ и привод, выполненный в виде силовых цилиндров, о т л и ч а - ю щ и и с я тем, что, с целью повышения надежности з& счет исключения ударов на конечных участках поворота последующего звена, в кинематическую цепь9 связьшающую указанные звенья, введена дополнительная зубчато-реечная передача( а выходной элемент основной зубчато-реечной передачи снабжен рег улируемым в радиальном направлении кривошипом причем зубчатая рейка дополнительной зубчато-реечной пе редачи размещена Б дополнительно выполненных на предыдущем звене направ ляющих и снабжена поперечным пазомj в котором размещен указанный кривошип, а зубчатое колесо этой дополнительной передачи закреплено на поапедующем звене.
ВидА
16
Фиг. 2
| название | год | авторы | номер документа |
|---|---|---|---|
| Привод манипулятора | 1985 |
|
SU1293018A1 |
| Манипулятор | 1983 |
|
SU1186464A1 |
| Манипулятор | 1985 |
|
SU1269994A1 |
| Промышленный робот | 1987 |
|
SU1537514A1 |
| Захват промышленного робота | 1979 |
|
SU841962A1 |
| Манипулятор | 1988 |
|
SU1684021A1 |
| Манипулятор | 1978 |
|
SU874330A1 |
| Устройство для захвата и подачи плоских изделий | 1986 |
|
SU1375548A1 |
| КРИВОШИП С ПЕРЕМЕННЫМ РАДИУСОМ | 2000 |
|
RU2185897C2 |
| Автоматическое загрузочное устройство | 1984 |
|
SU1220783A1 |

Изобретение относится к области машиностроения, и более конкретно к робототехнике, и может быть использовано для перемещения рабочих органов роботов и манипуляторов. Цель изобретения - повьпление надежности за счет исключения ударов на конечных участках поворота последующего звена. Подачей рабочего тела в цилиндр поршень перемещается вправо и рейкой 3 поворачивает зубчатое колесо. При этом кривошип 6 через ползун 12 перемещает рейку 8, которая поворачивает зубчатый венец 9 с последующим звеном 2, Скорость поворота звена 2 изменяется по синусоидальному закону. Упоры служат для повышения точности позиционирования звена 2 в крайних положениях, 4 ил. о фиг. tr СлЭ 00 ел и р1 4
фиг.Ъ
(ua.ii
| Механизм поворота робора модели Циклон, - В кн.: Промышленная робототехника./ Под ред | |||
| Я | |||
| А | |||
| Шифрина | |||
| М.: Машиностроение, 982, с, 65, рис, 25, |
