(54) КОЛЕСНО-ШАГАЮЩИЙ ДВИЖИТЕЛЬ
1
Изобретение относится к электротехнике и может быть использовано в электроприводах колесно-шагающих движителей транспортных средств высокой проходимости.
По основному авт. св. № 650877 известен колесно-шагающий движитель, содержащий электродвигатель постоянного тока, соединенный с входным валом блокирующего механизма, выходные звенья которого снабжены управляемыми электромагнитными тормозами и соединены соответственно через дополнительный и тяговый редукторы с первым рычагом, шарнирно соединенным одним концом с корпусом транспортного средства, а другим - с вторым рычагом, соединенным со ступицей колеса 1.
Включение двигателя и одного из управляемых тормозов обеспечивает колесный режим движения, включение двигателя и другого тормоза - режим переноса корпуса, а включение двигателя и обоих тормозов - режим выноса колеса. В указанном движителе весьма просто и эффективно производится управление сменой режимов движения. Кроме того, ликвидирован откат колеса при неблагоприятных соотношениях внешних сил, действующих на колесо и корпус транспортного средства за
2
счет жесткой кинематической связи элементов электропривода.
Однако наличие в составе электропривода управляемых тормозов утяжеляет 5 движитель, а устройство управления электродвигателем движителя при ограниченной мощности источника питания (с учетом специфики транспортного средства) требует значительного числа ступеней пускового сопротивления для ограничения пускового тока электродвигателя и соответственное количество нуско-регулнрующей аппаратуры.
Целью изобретения является улучше15 ние массо-габаритных показателей.
Цель обеспечивается тем, нто движитель снабжен реле ускорения с замыкающим и размыкающим контактами, а обмотка каждого тормоза выполнена из двух
20 частей, форсирующей и удерживающей, причем форсирующие обмотки тормозов включены в якорную цепь электродвигателя постоянного тока и зашунтированы замыкающим контактом реле ускорения,
25 катушка которого подключена параллельно якорной цепи указанного электродвигателя, а размыкающие контакты реле шунтируют контакты блока управления тормозами, включенными в цепн удерживаю30 щих обмоток тормозов.
Форсирующие обмотки тормозов соединены между собой последовательно.
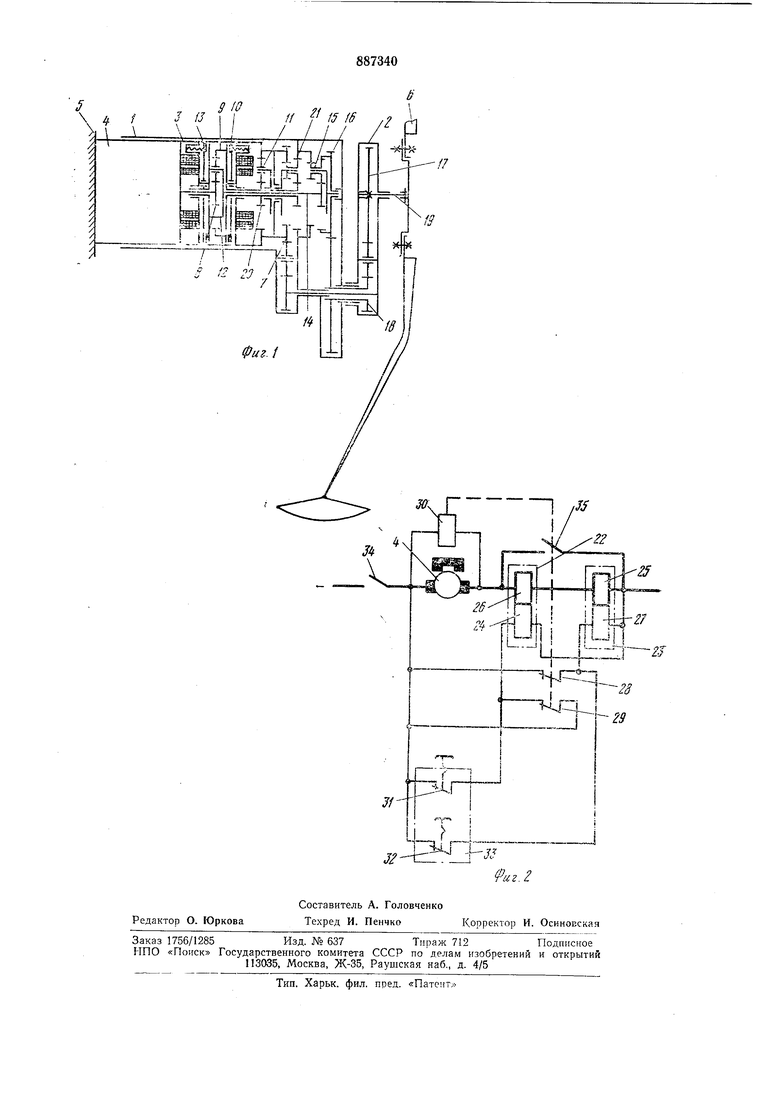
На фиг. 1 представлена кинематическая схема предлагаемого колесно-шагающего движителя; на фиг. 2 - электрическая схема.
Колесно-шагающий движитель содержит два пустотелых шарнирно-сочлененных рычага 1 и 2. Рычат 1 свободным концом установлен на стакане 3, конструктивно объединенным с корпусом тягового злектродви1гателя 4 постоянного тока, который установлен неподвижно на корпусе 5 транспортного средства.
Рычаг 2 связан со ступицей колеса 6. Рычаги движителя расположены в плоскости вращения колеса и кинематически связаны друг с другом с помощью редуктора 7 привода вращения рычагов. Выходной вал электродвигателя 4 соединен с солнечной щестерней 8 блокирующего механизма. Эпицикл 9 (первое выходное звено) блокирующего механизма снабжен электромагнитным тормозом 10 и соединен через планетарный редуктор 11 с рычагом 1, водило 12 ; (второе выходное звено) блокирующего механизма снабжено электромагнитным тормозом 13 и соединено с входным валом 14 тягового редуктора. Тяговый редуктор состоит из планетарной передачи 15 и цилиндрической пары 16, встроенных в первом рычаге, и ступени 17, встроенной в рычаге 2. Вал 14 тягового редуктора расположен соосно ступице рычага 1 и электрадви.гателя 4, промежуточный вал 18 - соосно оси сочленения рычагов 1 и 2, выходной вал 19 - соосно ступице колеса 6. Редуктор 11 расположен между блокирующим механизмом и планетарной передачей 15 тягового редуктора так, что его солнечные шестерни 20 охватывают вал .14 тягового редуктора, а эпицикл 21 последнего ряда выполнен заодно с рычагом 1.
Электромагнитные тормозы 10 и 13 снабжены обмотками 22 и 23 (см. фиг. 2), которые состоят из форсирующих 24, 25 и удерживающих 26, 27 обмоток.
Форсирующие обмотки 24, 25 введены в якорную цепь электродвигателя 4 и обтекаются его якорным током, а удерживающие обмотки 26, 27 подключены к источнику питания размыкающими контактами 28, 29 реле ускорения 30 и размыкающими контактами 31, 32 блока 33 управления тормозами.
Для осуществления выноса колеса при работе колесно-шагающего движителя в колесно-шагающем режиме контакты 31, 32 блока 33 управления тормозами должны быть установлены в положение, изображенное на фиг. 2. При включении главного выключателя 34, с помощью которого электропривод подключается к источнику питания, оба тормоза 10, 13 механически
выключаются в результате протекания по форсирующим обмоткам 24, 25 якорного тока электродвигателя и подключения к источнику питания удерживающих обмоток контактами 28, 29 реле 30 и размыкающими контактами 31, 32 блока управления тормозами. Между эпициклом 9 и водилом 12 блокирующего механизма и, следовательно, между соединенными с этими звеньями рычагом 1 и колесом 6 устанавливается дифференциальная связь так, что вращается и первый рычаг 1, и колесо 6. Колесо перемещается как ведущее от момента на колесе и толкаемое от силы на
конце рычага 2, причем нем больше сила сопротивления качению, тем больше момент на колесе и тем больше толкающая сила. При вращении рычага 1 благодаря динамическим связям редуктора привода
вращения рычагов и благодаря тому, что плечи этих рыча1гов равны ось колеса совершает прямолинейное перемещение относительно корпуса транспортного средства.
После разгона электродвигателя срабатывает реле ускорения 30, подключенное к якорной обмотке электродвигателя 4, в результате чего контакты 35 замыкаются, а контакты 28, 29 размыкаются. При этом
форсирующие обмотки 24, 25 тормозов замыкаются накоротко, а удерживающие обмотки обеспечивают удержание обоих тормозов в включенном состоянии.
Для осуществления ра|боты движителя
в колесном режиме контакт 31 блока 33 управления тормозами должен быть разомкнут, а контакт 32 замкнут. Тем не менее при включении главного выключателя 35 механически выключаются оба тормоза
в результате протекания по форсирующим обмоткам 24, 25 якорного тока электродвигателя и подключения к источнику питания удерживающих обмоток контактами 28 и 29. Разгон электродвигателя осуществляется при минимальной нагрузке на его валу (режим выноса колеса). После разгона электродвигателя и срабатывания реле ускорения 30 тормоз 13 остается механически выключенным, а тормоз 10 -
механически включенным, так как форсирующие обмотки 24, 25 тормозов вывеяеиы из якорной цепи электродвигателя 4 контактами 35 реле 30, удерживающая обмотка 27 тормоза 13 подключена к источпику питания контактом 32 блока 33 управления тормозами, удерживающая обмотка 26 тормоза 16 отключена от источника питания контактом 32 блока 33 управления тормозами. При этом эпицикл 9
соединяется с корпусом электродвигателя 4. В этом случае вся мощность электродвигателя через планетарный ряд блокирующего механизма и тя1говый редуктор передается колесу. Движитель работает в колесном режиме.
Для выноса корпуса при работе электродвигателя в колесношагающем режиме контакт 32 блока 33 управления тормозами должен быть разомкнут, а контакт 31 замкнут. Тем не менее при включении главного выключателя 34 механически выключаются оба тормоза 10 и 13 в результате протекания по их форсирующим обмоткам 24, 25 якорного тока электродвигателя и подключения удерживающих обмоток 26, 27 к источнику питания контактами 28, 29 реле 30 ускорения. Разгон электродвигателя осуществляется при минимальной нагрузке на его валу (режим выноса колеса). После разгона электродвигателя и срабатывания реле 30 тормоз 10 остается механически выключенным, а тормоз .13 механически включенным, так как форсирующие обмотки 24, 25 тормозов выведены из якорной цепи электродвигателя 4 контактом 35 реле 30, удерживающая обмотка 26 тормоза 10 подклю-чена к источнику питания контактом 31, а удерживающая обмотка 27 тормоза 13 отключена от источника питания контактом 32 блока 33 управления тормозами. Водило 12 блокирующего механизма и, следовательно, вал 14 тягового редуктора оказывается соединенным с корпусом электродвигателя 4, т. е. оказывается неподвижным. Вся мощность электродвигателя 4 через блокирующий механизм и планетарный редуктор передается на вращение рычагов, что вызывает перемещение корпуса 5 транспортного средства относительно оси колеса 6.
В электроприводе обеспечивается умень. шение массы и габаритов обмоток электромагнитных тормозов (а следовательно, и массы движителя) и упрощается пуск двигателя. Первое достигнуто кратковременным (на время разгона электродвигателя) форсированием каждого электромагнитного тормоза путем включения форсирующих обмоток тормозов в силовую цепь электродвигателя. Протекание по указанным обмоткам значительного пускового тока электродвигателя позволяет обойтись для создания ими необходимой магнитодвижущей силы малым числом витков. Кратковременность же протекания тока делает возможным выбор сечения меди форсирующих обмоток тормозов в 3-10 раз меньще. Уменьщение массы и габаритов обеспечивается и тем, что удерживающие обмотки при разгоне электродвигателя подключены к источнику питания.
Второе достигнуто осуществлением при
включении электропривода колесно-щагающего движителя режима выноса колеса, когда нагрузка электродвигателя минимальна, с последующим (после разгона электродвигателя) автоматическим переключением электропривода колесно-шагающего движителя на требуемый режим работы. Устройство позволяет обойтись минимальным числом ступеней пускового сопротивления и, следовательно, мииимальной массой пуско-регулирующей аппаратуры.
Последовательное соединение форсирующих обмоток обоих тормозов приводит к дополнительному снижению массы электромагнитных тормозов, а следовательно, и электропривода в целом.
Формула изобретения
25
1. Колесно-щагающий движитель по авт. св. № 650877, отличающийся тем, что, с целью улучщения массо-1габаритных показателей, в него введено реле ускорения с замыкающим и размыкающими контактами, а обмотка каждого его тормоза составлена из двух частей, форсирующей и удерживающей, причем форсирующие обмотки тормозов включены в
якорную цепь электродвигателя постоянного тока и защунтированы замыкающим контактом реле ускорения, катушка которого подключена параллельно якорной цепи указанного электродвигателя, а размыкающие контакты шунтируют контакты блока управления электромагнитными тормозами, включенными в цепи удерживающих обмоток.
2. Движитель, отличающийся тем, что форсирующие обмотки тормозов соединены между собой последовательно.
Источник информации, принятый во внимание при экспертизе:
1. Авторское свидетельство СССР
№ 650877, кл. В 62 D 57/02, 1977.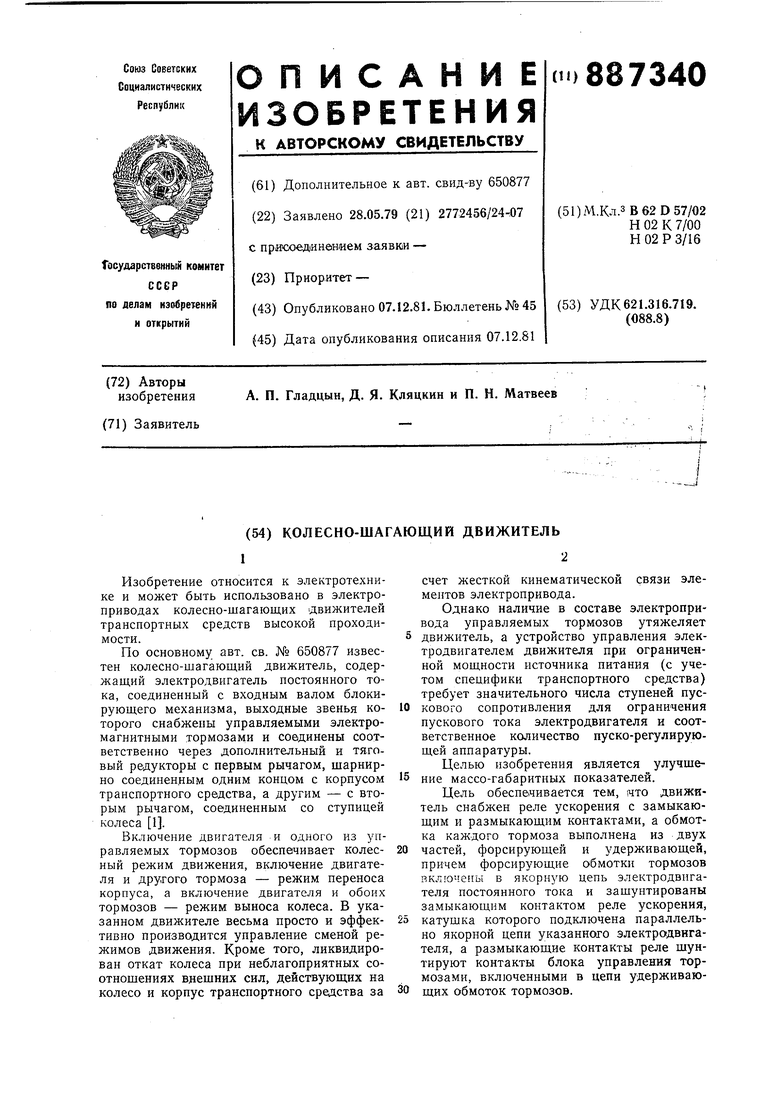
| название | год | авторы | номер документа |
|---|---|---|---|
| Колесно-шагающий движитель транспортного средства | 1981 |
|
SU1000336A1 |
| Колесно-шагающий движитель | 1980 |
|
SU948742A2 |
| Колесно-шагающий движитель | 1979 |
|
SU880852A1 |
| Колесно-шагающий движитель | 1980 |
|
SU874445A1 |
| Колесно-шагающий движитель | 1976 |
|
SU650877A1 |
| КОЛЕСНО-ШАГАЮЩИЙ ДВИЖИТЕЛЬ С ФУНКЦИЕЙ АКТИВНОЙ ПОДВЕСКИ | 2017 |
|
RU2671661C1 |
| Колесно-шагающий движитель | 1977 |
|
SU679465A1 |
| Колесно-шагающий движитель | 1980 |
|
SU908646A1 |
| Колесно-шагающий движитель | 1980 |
|
SU921936A1 |
| Устройство для обеспечения движения транспортного средства в колесно-шагающем режиме | 1977 |
|
SU659446A1 |