Известные устройства для малых перемещений, принцип действия которых основан на изменении размеров металлической детали, выполненной в виде стержня, втулки или диафрагмы, в пределах упругих дефор:маций под действием гидравлических сил, не обеспечивают фиксированных перемещений выходного элемента устройства.
Предлагаемый механизм свободен от этого недостатка. Сущность изобретення заключается в том, что выходной элемент механизма снабжен двумя гидравлическими зажимами, вкотючаемыми поочередно, которые размещены «а концах деформируемой детали.
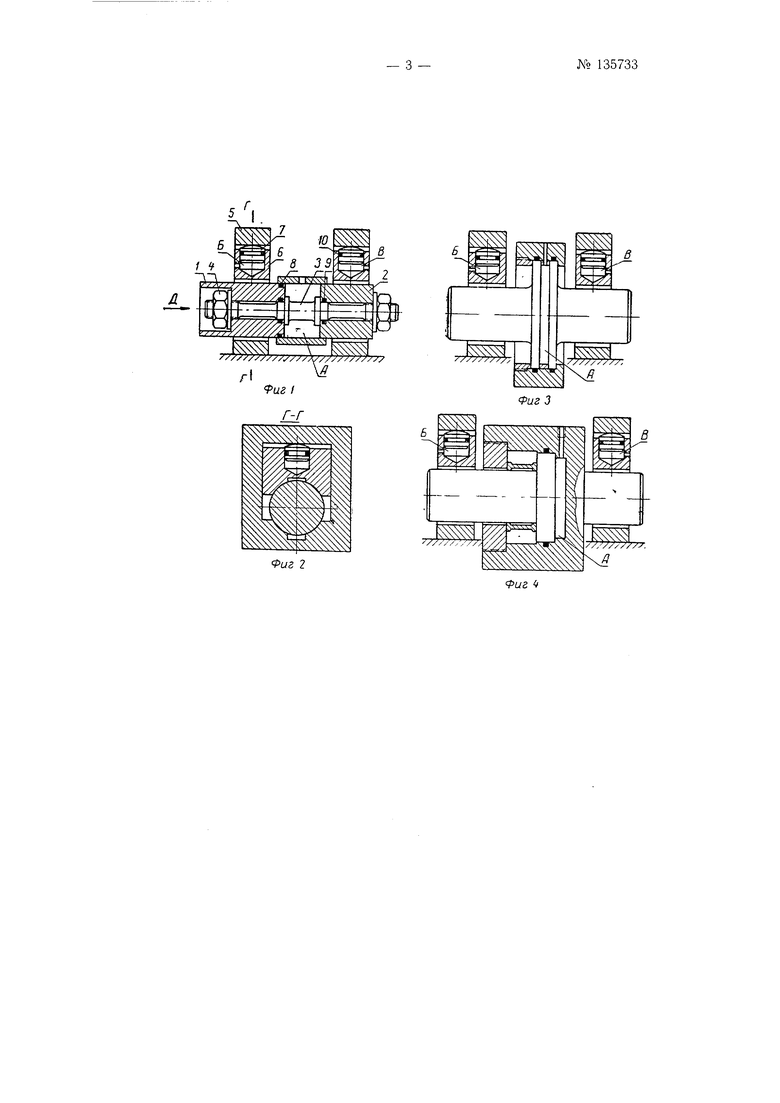
На фиг. 1 представлен механизм в продольном разрезе; на фиг. 2 - тоже частичный разрез по линии Г-Г; на фиг. 3 и 4 - конструктивные варианты механизма.
Механизм состоит из корпусов / и 2, соединенных стержнем 5 и гайками 4 с усилием, предотвращающим нарушение уплотнения между торцами корпусов и буртиками стержня при максимальном рабочем давлении в полости А. Корпус / зажат в неподвижном зажиме, состоящем из опоры 5, прижима 6 и плунжера 7. Корпус 2 зажат в аналогичном зажиме. Полости А, Б и В уплотнены резиновыми манжетами 8, 9 и 10.
Силы сопротивления, направленные по стрелке Д, воспринимаются корпусом /. В нерабочем состоянии полости Б к В находятся под давлением, при этом корпуса 1 и 2 зажаты, а полость Л разгружена.
Работа механизма заключается в следующем. В полости Б давление снимается и корпус 1 разжимается. В полости А создается давление, что приводит к удлинению стержня и перемещению корпуса /. Скорость перемещения корпуса может регулироваться в большом диапазоне, путем изменения скорости повыщения давления. После этого в полости Б поднимается давление и корпус / зажимается. В полости В снимается
№ 135733- 2 -
давление и корпус 2 разжимается. В полости А давление снимается, что приводит к сокращению стержня. Путем поднятия давления в полости В и зажима корпуса 2 с последующи.м снятием давления в полости А механизм приводится в исходное положение. При этом корпуса /, 2 и стержень 3 будут сдвинуты влево на определенную заданную величину А/, определяемую формулой:
/ (/3 - d) - Т
где Р - давление в гидросистеме;
/ -длина рабочего участка стержня;
Е - модуль упругости;
D - диаметр рабочей полости А;
d - диаметр стержня;
Т - силы сопротивления.
Величины D, d, Р к I подбираются с таким расчетом, чтобы было обеспечено заданное перемещение с необходимой точностью при переменной величине сил сопротивления.
Механизм может быть использоваи в качестве механизма подачи Щлифовальных и других станков и в качестве подающего органа различных приборок.
П р е д м с т II 3 о б р е т е И и я
Гидравл-ическйй .шханизм точных малых перемещений, состоящий ИЗ металлической дета.ли, например, стержня, втулки, диафрагмы, упруго деформируемой под действнех гидравлических сил, отличающийся тем, что, с целью по.тучения фикомрозанлых перемещений выходного элемента механизма, он снабжен .я поочередно включаемыми зажя.мами, например, гид1;авлическими, размещенными на концах деформируемой детали.

| название | год | авторы | номер документа |
|---|---|---|---|
| МНОГОКАНАЛЬНЫЙ КЛАПАН ДЛЯ ПЕРЕКЛЮЧЕНИЯ, ДОЗИРОВАНИЯ И ПЕРЕМЕЩЕНИЯ МАЛЫХ ПОТОКОВ И КОЛИЧЕСТВ ЖИДКОСТИ | 2022 |
|
RU2785697C1 |
| Шпиндельный узел | 1986 |
|
SU1743719A1 |
| КЛАПАННОЕ УСТРОЙСТВО | 1992 |
|
RU2067159C1 |
| Механизм зажима подвижного узла | 1980 |
|
SU865594A1 |
| Задняя бабка токарного станка | 1981 |
|
SU963697A1 |
| Привод для шагового перемещения | 1987 |
|
SU1446363A1 |
| Шлицехонинговальный станок | 1981 |
|
SU1044455A1 |
| Приспособление к металлообрабатывающим станкам для подачи и съема детали | 1940 |
|
SU61552A1 |
| Захватное устройство | 1990 |
|
SU1787760A1 |
| Устройство для утолщения концов труб | 1978 |
|
SU745587A1 |