Изобретение относится к измерительной технике- и может быть использовано для преобрлзования линейных перемещений в электрический сигнал.
Целью изобретения являетсй пову- шение точности измерения линейных перемещений при использовании меха- нотронного преобразователя путем устранения влияния зазора между втулкой клиновой передачи и корпусом преобразователя.
На чертеже представлена схематично конструкция преобразователя линейных перемещений,
Преобразователь содержит цилиндрический корпус 1, в котором размещен узкопредельный, первичный преобразователь - механотрон 2. Измерительный шток 3 жестко связан с втулкой 4 клиновой передачи, установленной в корпусе преобразователя с возможностью перемещения по скользящей посадке. Между подвижной втулкой 4 и механотроном 2 установлена пру- жина 5, которая может быть выполнена цилиндрической или конической. Измерительный рычаг 6 механотрона, упруго закрепленный одним концом в торце механотрона и предназначенный для обеспечения изменения зазора меж щ электродами механотрона, своим другим концом взаимодействует с внутренней конической поверхностью подвижной втулки 4. С этой же поверхностью взаимодействует своим концом упорньш стержень 7, конец .которого жестко закреплен на дополнительном корпусе 8, в который помещен механотрон 2.
Между корпусами 1 и 8 преобразователя установлен шарнир 9, позволяющий поворачиваться корпусу 8 с механотроном относительно корпуса 1 преобразователя, в которьй встроена клиновая передача, обеспечивающая расширение диапазона измеряемых перемещений механотрона, представляющего собой узкопредельньм первичный преобразователь перемещений.
Преобразователь линейных перемещений работает следующим образом. I
В исходном положении измерительный шток 3 и втулка 4 находятся в крайнем левом положении и пружина 5 механотрона 2, а также упорный стержень 7, жестко скрепленный с дополнительным корпусом 8, взаимодействуют с конической поверхностью втулки
0
g
g
5 о
4 на участке большого ее диаметра. При перемещении измерительного штока 3 вправо происходит осевое перемещение втулки 4 в ту же сторону.
При этом измерительный рычаг 6 механотрона 2, взаимодействующий с конической поверхностью втулки 4, опускается вниз, обеспечивая изменение зазоров между электродами механотрона 2, что вызывает изменение анодного тока, отмечаемое отсчетно- регистрирующей частью преобразователя (не показана).
Одновременно с этим усилие, возникающее при взаимодействии упорного стержня 7 с конической поверхностью втулки 4, вызывает поворот дополнительного корпуса 8 с механотроном 2 относительно оси основного корпуса 1., обеспечивая надежный контакт измерительного рычага 6 механотрона 2 с внутренней конической поверхность втулки 4 и .автоматически центрируя измерительный рычаг 6 механотрона и упорный стержень 7 относительно подвижной втулки 4. Благодаря этому обеспечивается устранение влияния зазора между втулкой 4 и основным корпусом 1 преобразователя на результат измерения.
25 зо
Пружина 5, используемая в преобразователе, необходима для создания 2g измерительного усилия, которое после окончания измерения возвращает втулку 4 и измерительный шток в исходное состояние.
Шарнир 9, соединяющий торцовые , поверхности основного и дополнительного корпусов, дает возможность поворачиваться дополнительному корпусу 8 относительно основного корпуса.
Усилие, приводящее к повороту дополнительного корпуса 8 относительно основного 1, создается за счет взаимодействия упорного стержня 7 с внутренней конической поверхностью втулки 4.
Благодаря этому обеспечивается независимость преобразования линейных перемещений от радиального зазора между связанной с измерительным штоком втулкой клиновой передачи и основным корпусом преобразователя, что повьш1ает точность измерения линейных перемещений.
313576964
Формула изобретенияличающийся тем, что, с
целью повышения точности путем устПреобразователь линейных переме-ранения влияния зазора между втулкой щений, содержащий цилиндрическийи корпусом, он снабжен дополнитель- корпус, измерительный шток, жестконым корпусом для размещения механо- связанную с ним втулку, установлен-трона, торцовая поверхность которого ную в корпусе с возможностью переме-шарнирно связана с торцовой поверх- щения по скользящей посадке, внутрен-ностью корпуса преобразователяj и няя поверхность которой выполнена jgжестко закрепленным одним концом на конической, и подпружиненный относи-дополнительном корпусе упорным стерж- тельно втулки механотрон, измеритель-нем, взаимодействующим противоположный рычаг которого контактирует снык концом с конической поверхностью конической поверхностью втулки, о т-втулки.
| название | год | авторы | номер документа |
|---|---|---|---|
| Преобразователь линейных перемещений | 1991 |
|
SU1796864A1 |
| Механотронный преобразователь линейных перемещений | 1991 |
|
SU1816961A1 |
| АВТОМАТ ДЛЯ КОНТРОЛЯ РАЗМЕРОВ БАЛЛОНОВ ЭЛЕКТРОННОЛУЧЕВЫХ ТРУБОК | 1971 |
|
SU296173A1 |
| Устройство активного контроля размеров деталей | 1986 |
|
SU1404305A1 |
| Установка для ультразвуковой микросварки и контроля соединения | 1988 |
|
SU1540986A1 |
| Способ измерения температурных и силовых параметров в процессе резания при сверлении | 2022 |
|
RU2796967C1 |
| ГОЛОВКА ДЛЯ КОНТРОЛЯ ЛИНЕЙНЫХ РАЗМЕРОВ | 2014 |
|
RU2576549C1 |
| Устройство для измерения силы | 1990 |
|
SU1760387A1 |
| СИСТЕМА ДЛЯ АКТИВНОГО КОНТРОЛЯ РАЗМЕРОВ ДЕТАЛЕЙ И РЕГУЛИРОВАНИЯ ДЕФОРМАЦИЙ КРУГЛОШЛИФОВАЛЬНОГО СТАНКА | 1989 |
|
RU2014208C1 |
| Рычажно-механическая передача | 1978 |
|
SU819559A1 |
Изобретение относится к измерительной технике. Цель - повышение точности измерения линейных перемещений преобразователя механотронного типа, снабженного клиновой передачей для расширения диапазона измеряемых перемещений. Этот преобразователь снабжен шарнирно установленным дополнительным корпусом 8 для размещения в нем механотрона 2 и упорным стержнем 7, одним концом прикрепленным к этому корпусу, а другим взаимодействующим с конической поверхностью втулки 4 клиновой передачи, встроенной в основной корпус 1 преобразователя. Благодаря этому обеспечивается устранение влияния величины зазора между втулкой 4 и основным корпусом 1 на результат измерения, так как в процессе измерений линейных перемещений измерительный рычаг 6 преобразователя и упорный стержень 7 автоматически центрируются относительно подвижной втулки 4. Центрирование пр.о- . исходит за счет того, что смещение втулки 4 в радиальном направлении относительно основного корпуса 1 вызывает поворот дополнительного корпуса 8 относительно основного на угол, пропорциональный этому смещению. 1 ил. сл /У со сл 05 СО 05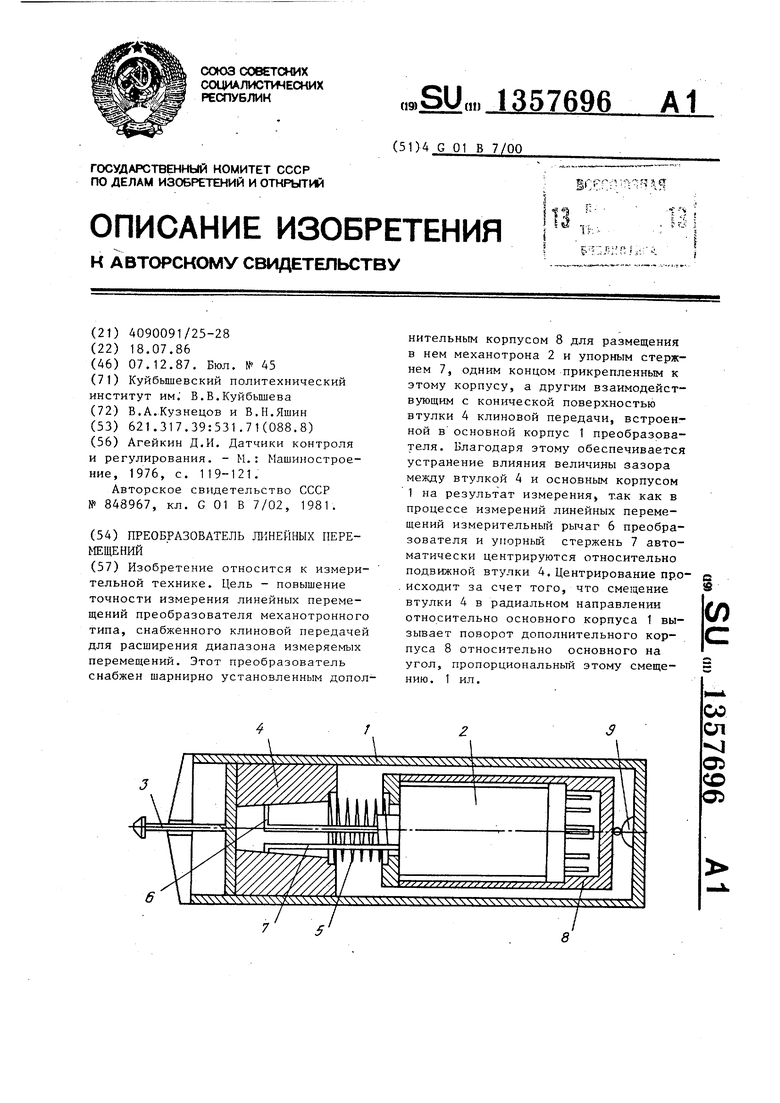
| Агейкин Д.И | |||
| Датчики контроля и регулирования | |||
| - М.: Машиностроение, 1976, с | |||
| Способ получения камфоры | 1921 |
|
SU119A1 |
| Преобразователь линейных перемещений | 1979 |
|
SU848967A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
