Изобретение относится к автоматическому управлению положением рабочего, органа, например, в станках с ЧПУ.
Цель изобретения - повышение надежности устройства.
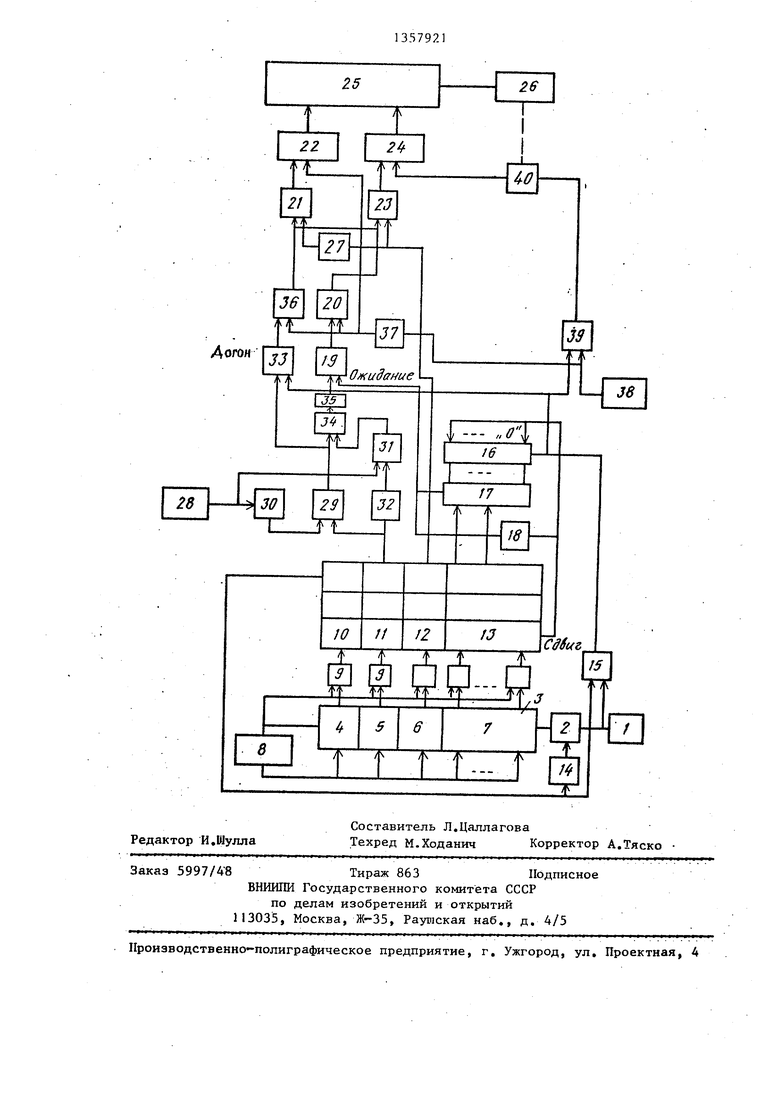
На чертеже представлена схема устройства для управления положением объекта.
Устройство содержит приемник 1, второй элемент И 2, входной регистр 3, разряды 4-7 входного регистра, первый блок 8 задержки, первые элементы И 9, сдвиговые регистры 10, разряды 11-13 сдвигового регистра, первый элемент НЕ 14, третий элемент И 15, счетчик 16, блок 17 поразрядного сложения по модулю два, второй блок 18 задержки, тестой 19, девятый 20, одиннадцатый 21, тринадцатый 22, десятый 23 элементы И, второй элемент ИЛИ 24, блок 25 запуска исполнительного механизма 26, пятый элемент НЕ 27, блок 28 коррекции, седьмой элемент И. 29, тpetий элемент НЕ 30,. восьмой элемент И 31, второй элемент НЕ 32, четвертый элемент И ji3, первый элемент ИЛИ 34, четвертый эле-
35
мент НЕ 35, двенадцатый элемент И 36, зо е импульсом, -прошедршм через блок шестой элемент НЕ 37, аварийный датчик 38, пятый элемент И 39, концевой выключатель 40, управляющий вьгчисли- тельный блок 41,
Устройство работает следующим образом.
От приемника 1, принимающего управляющий код от устройства управления СЭС, информация через открытый элемент И 2 поступает во входной регистр
3,Последний имеет служебный разряд
4,разряд 5 коррекции, разряд 6 на правления вращения и несколько разря-
40
18 задержки, происходит сброс в О разрядов счетчика и сдвиг на один разряд содержимого сдвиговых регист ров. Сброс счетчика в О и сдвиг регистров 10 должны происходить за время, меньшее, чем период следован синхроимпульсов.
Логическая 1 с выхода блока 17 сложения по модулю два через элемен И 19, элемент И 20 и элементы И 21 22 (для вpaщe шя против часовой стрелки) или элементы И 23 и ИЛИ 24 поступает на блок 25 запуска исполнительного механизма 26,
дов 7 времени, В первом разряде управляющего кода стоит логическая., ПОЭТОМУ , когда управляющий код полностью входит во входной регистр 3, его служебный разряд 4 сменяет состояние из О в 1, а 1 открывает элементы И 9 и содержимое входного регистра 3 записывается в первые разряды служебного сдвигового регистра 10, регистра коррекции 11, регистра направления вращения 2 и нескольких
45
50
Логическая 1 с выхода блока 17 сложения по модулю два через элемент И 19, элемент И 20 и элементы И 21 и 22 (для вpaщe шя против часовой стрелки) или элементы И 23 и ИЛИ 24 поступает на блок 25 запуска исполнительного механизма 26,
Направление врап;ения исполнительного механизма 26 определяется содержимым последнего разряда 12 регистра направления вращения, если в этом разряде 1, то открыт элемент И 23,- а через элемент ИЛИ 24 происходит включение исполнительного механизма по часовой стрелке, если в разряде О, то происходит включение исполнительного механизма против часовой регистров времени 13, Этим же импуль- gg стрелки через элементы НЕ 27, И 21 и сом со служебного разряда 4, прошед- И 22,
шим через блок 8 задержки, произво- Схемой устройства для управления дится сброс в О всех разрядов вход- положением .объекта предусмотрены ре- ного регистра. Затем на вход входного жимы коррекции положения объекта.
регистра 3 поступает следующий уп- равляюп1ий код. Этот процесс повторяется до тех пор, пока не заполнятся
все сдвигбвые регистры. Когда заполнятся последние разряды сдвиговых регистров, то на элемент НЕ 14 подается с последнего разряда служебного регистра напряжение, соответствующее
логической 1, элемент И 2 закрывается, а элемент И 15 открывается. На этом оканчивается этап подготовки устройства управления к работе,
И расчетное время, совпадающее с
моментом начала рабоэы, например, всех станков, обп1ее управляющее устройство начинает передавать синхроимпульсы, которые принимаются приемником 1 и через открытый элемент И 15
поступают на вход счетчика 16, число разрядов которого равно количеству разрядов 13 регистров времени. Разряды счетчика 16 и последние разряды 13 регистров времени подключены к со-
ответствующим разрядам блока 17 сложения по модулю два, который выдает на своем выходе 1 при уравнивании содержимого последних разрядов 13 регистров времени и счетчика 16,этим
е импульсом, -прошедршм через блок
18 задержки, происходит сброс в О разрядов счетчика и сдвиг на один разряд содержимого сдвиговых регистров. Сброс счетчика в О и сдвиг регистров 10 должны происходить за время, меньшее, чем период следования синхроимпульсов.
Логическая 1 с выхода блока 17 сложения по модулю два через элемент И 19, элемент И 20 и элементы И 21 и 22 (для вpaщe шя против часовой стрелки) или элементы И 23 и ИЛИ 24 поступает на блок 25 запуска исполнительного механизма 26,
Направление врап;ения исполнительного механизма 26 определяется содержимым последнего разряда 12 регистра направления вращения, если в этом разряде 1, то открыт элемент И 23,- а через элемент ИЛИ 24 происходит включение исполнительного механизма по часовой стрелке, если в разряде О, то происходит включение испол:
Режим коррекции осуп1естпляется еле- дуюгдим образом, Упрарляюпщй код содержит разряд коррек1Ц1и, в который заносится 1, если во время отрабатывания этого кода с блока 28 корреции по расчету должен поступать си1- нал, если не должен, то Б разряд за
писывается О . Имеется несколько возможных вариантов сочетания сигна- ig лов от блока 28 коррекции и послед- .него разряда 11 регистра коррекции - О, О, тогда элемент И 29, на первый вход которого через элемент НЕ 30 подается 1, а на второй вход - 15 О, закрыт. Закрыт при этом элемент И 31, на первый вход которого подается О с блока 28 коррекции, а на второй вход - 1 через элемент НЕ 32. Элемент И 33 тоже закрыт, так как на его первый вход подается О с выхода элемента И 29, на обоих входах элемента ИЛИ ЗА О, а следовательно, на первый вход элемента И 19 подается с выхода элемента НЕ 35 , 25 все устройство для управления положением объекта работает в нормальном режиме, так как объект не -отстает и не опережает заданный график работы.
Сочетание О, 1 сигналов означает отставание объекта от расчетного режима, поэтому устройство для управления положением объекта включает режим Догон. Схематически этот режим осуществляется следующим образом. На оба входа элемента И 29 подаются 1, следовательно, на выходе И 29
также
поэтому элемент И 33 открыт для прохождения синхроимпульсов с элемента И 15 на элемент И 36, на второй вход которого подается инвер- 20 сированный элементом НЕ 37 выходной сигнал аварийного датчика 38, т.е. элемент И 36 открыт до тех пор, пока нет аварийного сигнала. Далее -синхроимпульсы с выхода элемента И 36 проходят через элементы И 21 и 22 или И 23 и ИЛИ 24 в зависимости о т содержания разряда 12 регистра направления врап1ения, на блок 25 запуска исполнительного механизма 26. Элемент И 19
При режиме 1, 1 -работа устрой- ЗО при этом закрыт и запускающие импуль- ства считается нормальной. На выходах сы с блока 17 сложения по модулю два
элементов И 29 и 31 логические-- 0, элемент И 33 закрыт, что означает сигнал от блока коррекции поступил точно в расчетное время и отстаивания или опережения объектом заданного режима нет.
не проходят. Исполнительный механизм 26 в этом режиме работает максимально возможной скоростью, определяемой
25 частотой следования синхроимпульсов. Режим Догон поддерживается до тех пор, пока блок 28 коррекции не выста вит 1. Если отставание гелиостата от расчетного режима большое, то ре-
Состояние 1
1 означает, что
фактически объект уже занял положение, при котором блок коррекции выдал 1, а по расчету этого не должно быть, значит объект должен обождать пока не придет сигнал от разряда 11 регистра коррекции. Этот режиме осуп1ествляется отключением блока 25 запуска исполнительного механизма 30 до тех пор, пока разряд 11 регистра коррекции не выставит 1 после этого блок 25 запуска включается. Схематически указанный процесс происходит следующим образом. На оба входа элемента И 29 поступает О и О с его выхода подается на первый вход элемента И 33 и первый вход элемента ИЛИ 34, вследствие этого элемент И 33 закрыт. Элемент И 31 открыт так как на его входе поступают 1 от блока 28 коррекции и от разряда 1 1 регистра коррекции через элемент НЕ
32. 1 поступает с выхода элемента И 31 через элемент ИЛИ 34 на элемент НЕ 35, инвертируется им и запирает элемент И 19, тем самым прерывая прохождение сигналов на блок 25 запуска от блока 17 сложения по модулю два.
Сочетание О, 1 сигналов означает отставание объекта от расчетного режима, поэтому устройство для управления положением объекта включает режим Догон. Схематически этот режим осуществляется следующим образом. На оба входа элемента И 29 подаются 1, следовательно, на выходе И 29
также
поэтому элемент И 33 от
крыт для прохождения синхроимпульсов с элемента И 15 на элемент И 36, на второй вход которого подается инвер- сированный элементом НЕ 37 выходной сигнал аварийного датчика 38, т.е. элемент И 36 открыт до тех пор, пока нет аварийного сигнала. Далее -синхроимпульсы с выхода элемента И 36 проходят через элементы И 21 и 22 или И 23 и ИЛИ 24 в зависимости о т содержания разряда 12 регистра направления врап1ения, на блок 25 запуска исполнительного механизма 26. Элемент И 19
не проходят. Исполнительный механизм 26 в этом режиме работает максимально возможной скоростью, определяемой
частотой следования синхроимпульсов. Режим Догон поддерживается до тех пор, пока блок 28 коррекции не выста вит 1. Если отставание гелиостата от расчетного режима большое, то ре-
им Догон может включаться несколько раз.
Устройство для управления объектом предусматривает аварийный режим работы, заключающийся в следующем. При
поступлении сигнала, соответствующего 1, с аварийного датчика 38, элемен ты И 36 и 20 запираются этим сигнаом через инвертор НЕ 3.7, тем самым выключаются все указанные режимы. Этим же сигналом открывается элемент И 39 и на исполнительный механизм 26 по цепи элемент И 15 - элемент И 39- концевой выключатель 40 - элемент ИЛИ 24 - блок 25 запуска - исполни- .
тельный механизм 26 следуют синхроимпульсы, как и в режиме Догон исполнительный механизм 26 работает с максимальной скоростью, причем вращение происходит в определенную сто
5135792
pony (в указанном примере по часовой стрелке). При достижении объектом аварийного положения, например гори- зонтал7 ного, срабатывает концевой выклю штель 40 и исполнительный механизм 26 прекращает работу.
В качестве блока коррекции могут быть использованы, например, концевые выключатели типа КВК-2494.
5
10
Формула изобретения З стройство для управления положением , содержа1цее управляющий
вычислительный блок, соединенный пер- 15 соединены соответственно с первым
вым и вторым выходами с соответствующими входами блока запуска исполнительного механизма, а также приемник, о-т л и ч а ю 05 е е с я тем, что, с целью повышения надежности устройства, оно содерз шт блок коррекции, аварийный датчик и концевой выключатель исполнительного механизма, а управляющий вычислительный блок включает в себя входной и сдвиговые регистры, два блока задержки, счетчик, блок поразрядного сложения по модулю два, элементы И, ИЛИ и НК, входные разряды сдвиговых регистров соединены с выходами первых элементов И, первые вхо/1,ы которых соединены с выходом служебного разряда входного регистра а вторые входы - с соответствующими- выходами разрядов входного регистра, выход служебного разряда входного регистра подключен через первый блок задержки к входам установки в О разрядов входного регистра, причем вход первого разряда входного регистра соединен с выходом второго элемента И, первый вход которого соединен с первым входом управляю1цего вычислительного блока и с первым входом третьего элемента И, а второй вход - с выходом первого элемента НЕ, подключенного входом к выходу последнего разряда служебного сдвигового регистра и к второму входу третьего элемента И, выход которого соединен со счетным входом счетчика и первыми входами четвертого и пятого элементо И, выходы разрядов счетчика и выходы последних разрядов сдвиговых регистров времени соединены с соответст-
вующими разрядами блока поразрядного gg блока коррекции, с выходом аварийносложения по модулю два, выход которого связан с первым входом шестого элемента И, а через второй блок задержки - с входами установки в
О
разрядов счетчика и сдвиговыми входами сдвиговых регистров, выход последнего разряда сдвигового регистра коррекции соединен с первьм входом седьмого элемента И и входом второго элемента НЕ, второй вход седьмого элемента И соединен с выходом третьего элемента НЕ, подключенного входом к второму входу управляющего вычислитель, ного блока и первому входу восьмого элемента И, второй вход которого соединен с выходом второго элемента НЕ, выходы седьмого и восьмого элементов
и вторым входами первого элемента ИЛИ, выход седьмого элемента И подключен к второму входу четвертого элемента И, выход первого элемента ИЛИ соединен через четвертый элемент НЕ с вторым входом шестого элемента И, подключенного выходом к первому входу девятого элемента И, выход которого coeди eн с первыми входами десятого и одиннадцатого -элементов И и выходом двенадцатого элемента И, выходы десятого и одиннадцатог о элементов И соединены с первыми входами соответственно тринадцатого элемента И и вто-
рого элемента ИЛИ, выходы которых подключены соответственно к первому и второму выходам управляющего вычислительного блока, выход последнего разряда сдвигового регистра направления вращения соединен с вторым входом десятого элемента И, а через пятый элемент НЕ - с вторь м входом одиннадцатого элемента И, второй вход пятого элемента И подключен к третьему входу управляющего вычислительного блока и через честой элемент НЕ - к второму входу тринадцатого элемента И, к второму входу девятого элемента И и первому входу двенадцатого эле-
мента И, второй вход которого соединен с выходом четвертого элемента И, выход пятого элемента И соединен с третьим выходом управляющего вычислительного блока, подключенного чет-.
вертым входом к второму входу второго элемента MJIHj первый, второй, третий и четвертый входы управляющего вычислительного блока связаны соответственно с выходом приемника, с выходом
го датчика и выходом концевого выклн чателя исполнительного механизма, а третий выход - с входом концевого выключателя исполнительного механизма.
Редактор И,Р1улла
Заказ 5997/48Тираж 863Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, PayrJCKan наб., д. 4/5
Производственно-полиграфическое предприятие, г, Ужгород, ул. Проектная, 4
Составитель Л.Цаллагова
Техред М.Ходанич Корректор А.Тяско
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для сложения и вычитания чисел с плавающей запятой | 1985 |
|
SU1315969A1 |
| Устройство для контроля аналоговых объектов | 1986 |
|
SU1397941A1 |
| Устройство для мажоритарного выбора сигналов | 1988 |
|
SU1711167A1 |
| Устройство контроля для систем программного управления | 1990 |
|
SU1775716A1 |
| Устройство для мажоритарного выбора сигналов | 1989 |
|
SU1656539A1 |
| Устройство для сопряжения цифровых вычислительных машин с каналами связи | 1985 |
|
SU1287171A1 |
| Устройство для контроля электропотребления | 1988 |
|
SU1566371A1 |
| Полевой модуль | 1987 |
|
SU1550451A1 |
| МИКРОПРОГРАММНОЕ УСТРОЙСТВО УПРАВЛЕНИЯ | 1993 |
|
RU2079876C1 |
| Устройство контроля ошибок многоканальной аппаратуры магнитной записи | 1987 |
|
SU1529285A1 |
Изобретение относится к области автоматического управления положением объектов, в частности положением рабочего органа в станках с ЧПУ.Цель изобретения - повышение надежности устройства, lля этого в устройство, содержащее управляюп1;ий вычислительный блок, блок запуска исполнительного механизма, а также приемник, введены дополнительно блок коррекции, аварийный датчик и концевой выключатель исполнительного механизма, а управляющий вычислительный блок включает в себя входной и сдвиговые регистры, два блока задержки, счетчик, блок поразрядного сложения по модулю два, элементы И, ШШ, НЕ, Данное устройство позволяет осуществлять такие режимы работы, как слежение, коррекция, аварийный. 1 ил. оо О1 со ю
| АН Туркм.ССР | |||
| Сер | |||
| физ.- тех., 1980, fp 6, с | |||
| Шкив для канатной передачи | 1920 |
|
SU109A1 |
