Изобретение относится к электрооборудованию подвижного состава железных дорог, а именно к снособам регулирования тока в микронроцессорных системах управления тяговым электроириводом.
Цель изобретения - повы1иение точности,
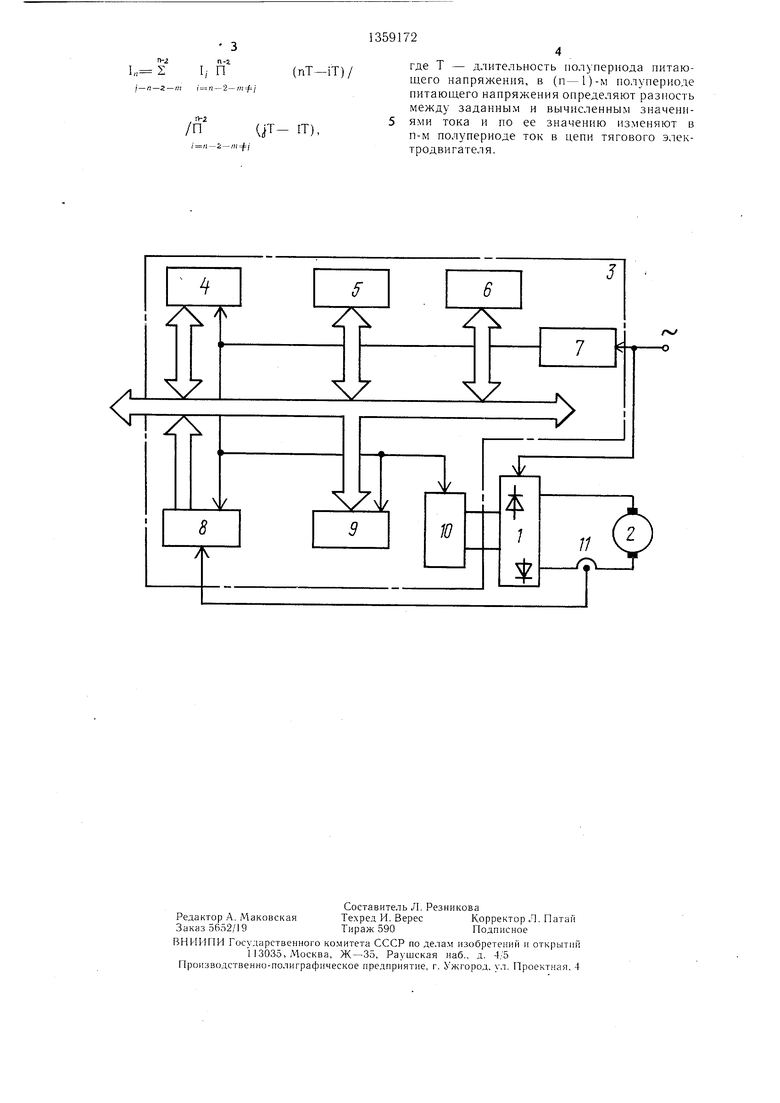
На чертеже изображена блок-схема устройства для реализации снособа регулирования тока в цени тягового электродвигателя пульсирующего тока.
Устройство для регулирования тока в цени тягового электродвигателя нульсирую- тока состоит из вентильного преобразователя 1, к выходу которого нодклю- чеп тяговый электродвигатель 2, а к управляющему входу - выход блока 3 автоматического регулирования тока, состоящего из связанных между собой процессора 4, узла 5 оиеративной намяти и узла 6 постоянной намяти.-узла 7 синхронизации аналого-цифрового нреобразователя (АЦП) 8, дискретного фазосдвигающего узла 9 и распределителя 10, выход которого является выходом блока 3, причем вход аналого- цифрового преобразователя 8 соединен с выходом датчика 1 1 тока в цени тягового электродвигателя 2. Вентпльный преобразо- ватель 1 соединен с однофазным источником питания перемеппого, тока, к которому подключен вход узла 7 синхропиза- цпп.
Устройство, нанример, в (п-1)-м иолу- 1|ериоде питающего напряжения работает следующим образом.
При переходе питающего напряжения через нулевое значение на выходе узла 7 син- хронизацпи появляется импульс, но которому происходит начальная установка процессора 4 и запуск АЦП 8 и дискретпо1-о фазосдвигаюп1,его узла 9. После STOi O блока 3 управления функционирует в соответствии с командами и константами, занисаппыми в узле 6 постоянной намяти. Осуществляется ввод из АЦП 8 измеренного средпего значения тока предыдуп1его (п-2)-го полу- периода и заноминание этого значения в узле 5 о 1еративной памяти. Затем на основании значений этой велйчииы в m полупериодах осуществляется экстраполяция ее значения 15 п-м полупериоде. Экстраноляцион- ная формула является частным случаем полинома Лагранжа. Значение т онределя - ется требуемой точностью экстраполяции. Погре1ппоеть экстраполяции зависит от частотного спектра экстраполируемого параметра и числа его зпачепий, используемых Д1Я экстрап() 1яцин. Поско, 1ьку велич1П1ы про- пзводных среднего за полунериод тока тягового нривода не превышают нроизводных гармонического сигнала с периодом 0,14 с, то ногрепшость экстраполяции не превыщает 2%, т.е. имеется возможность нрогноза значений тока па п-й полупериод с точностью не ниже точности измерений. При этом экстраноляционная формула для он
ределения среднего значения полупериоде
п-2
П (пТ-iT)
-2 ( 11- 2 тф1
L
Ч -2 1 п-1-п YI
(jT-iT
дл ш 2, 3, 4 имеет достаточно простой , ..,. 31„.4;
вид:
т 3, 1„
т 4, 1„ 241„.5+ .
-г01„ з+
451„-.,
0
5
о
0
5
0
5
После вычисления значения тока в п-м полупериоде определяют расеогласование между заданным и экстранолированным значениями тока и вычисляют уиравляющее воздействие а. После этого осуществляют вывод управляющего воздействия в дискретный фа- зосдБигаюн1ИЙ узел 9, и процессор 4 переходит в режим ожидания следующего синхроимпульса. В следующем полунериоде на выходе дискретного фазосдвигающего узла 9 формируетея импульс отпирания вентилей инвертора, фаза которого сдвинута относительно синхроимнульса на величину а. Рас- преде.чпте.чь 10 распределяет импу, 1ьсы ю ||.1ечам нреобразователя в зависимости от полярности полунериода иитающего нап)яже- н и я.
Реализация предлагаемого способа регулирования тока тягового электродвигателя позволяет улучщить качество регулирова- иия за счет прогнозирования величины среднего значения тока на полупериод реализации управляюн его воздействия. Благодаря этому повышается устойчивость системы регулирования в переходных процессах.
Формула изобретения
Способ регулирования тока в цепи тягового электродвигателя пульсируюплего тока, согласно которому формируют сигнал заданного значения тока, в каждом иолу- периоде питающего напряжения измеряют среднее значение тока в цеии тягового электродвигателя и изменяют ток в его цепи, отличающийся тем, что, с целью новыщения точности, в каждом полупериоде питающего напряжепия запомипают среднее .значение тока в цепи тягового электродвигателя, в (п-1)-м полуперподе питающего нанря ь.е- ния вычисляют значение тока в цепи тягового двигателя в п-м нолупериоде питающего нанряжения укстрапо. шцпеи значений тока в цепн тягового двигаге.1я в предыдущих 1П но.чуиериодах пптающего папря- жения но формуле
П-2
In 2
I/ П
(пТ-iT)/
i - n-z - ni (i /г - 2 /п /
.
/п
-
QT- IT),
где Т - длительность полупериода питающего напряжения, в (п-1)-м полупериоде питающего напряжения определяют разность между заданным и вычисленным значени- ями тока и по ее значению изменяют в п-м полупериоде ток в цепи тягового электродвигателя.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ управления однофазным инвертором | 1985 |
|
SU1365306A1 |
| СПОСОБ УПРАВЛЕНИЯ ОДНОФАЗНЫМ ИНВЕРТОРОМ | 2001 |
|
RU2201031C2 |
| СПОСОБ ВЫРАВНИВАНИЯ НАГРУЗОК ТЯГОВЫХ ДВИГАТЕЛЕЙ | 2001 |
|
RU2207255C1 |
| СПОСОБ ВЫРАВНИВАНИЯ НАГРУЗОК ТЯГОВЫХ ДВИГАТЕЛЕЙ | 2004 |
|
RU2283784C2 |
| СТАБИЛИЗАТОР ТОКА | 2002 |
|
RU2219574C1 |
| Способ управления многозонным выпрямителем | 1986 |
|
SU1515291A1 |
| СПОСОБ ПОВЫШЕНИЯ ЭНЕРГЕТИЧЕСКИХ ПОКАЗАТЕЛЕЙ ЭЛЕКТРОВОЗА ПЕРЕМЕННОГО ТОКА И КАЧЕСТВА ЭЛЕКТРИЧЕСКОЙ ЭНЕРГИИ НА ТОКОПРИЕМНИКЕ ПРИ ЕГО РАБОТЕ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2467892C1 |
| СПОСОБ УПРАВЛЕНИЯ ЧЕТЫРЕХКВАДРАТНЫМ ПРЕОБРАЗОВАТЕЛЕМ | 2005 |
|
RU2289193C1 |
| Устройство для управления электродвигателем переменного тока | 1977 |
|
SU687553A1 |
| СПОСОБ ПРОГНОЗИРУЮЩЕГО ВЕКТОРНОГО РЕГУЛИРОВАНИЯ ЧЕТЫРЕХКВАДРАНТНОГО ПРЕОБРАЗОВАТЕЛЯ | 2004 |
|
RU2284635C2 |
Изобретение относится к электрооборудованию подвижного состава железных дорог, а именно к способам регулирования тока в микропроцессорных системах управления тяговым электроприводом. Цель изобретения - повьшление точности. Для регулирования тока в цепи тягового электродвигателя пульсирующего тока формируют сигнал заданного значения тока, в каждом полупериоде питающего напряжения измеряют и запоминают среднее значение тока в цепи тягового электродвигателя, (п-1)-м полупериоде вычисляют ; наченио тока в цепи тягового двигателя в п-м полупериоде экстраполяцией тока в предыдущих m полупериодах, в (п-1)-м полупериоде определяют разность между заданным и вычисленным значениями тока и по ее значению изменяют в п-м полупериоде ток в цепи тягового электродвигателя. 1 ил. & (Л со О1 со to
| Файнштейн В | |||
| Г | |||
| и др | |||
| Непосредственное цифровое регулирование скорости ти- ристорного электропривода постоянного тока.- Электротехническая промышленность | |||
| Сер | |||
| .Электропривод, 1980, вып | |||
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| Походная разборная печь для варки пищи и печения хлеба | 1920 |
|
SU11A1 |
