установленные на вертикальных осях. Устройство имеет натяжное приспособление 16 с отклоняющим роликом 17. На поводке 3 смонтирован упор, а на верхних концах вертикальных осей проходных роликов 15 - крон- штейны. На последних шарнирно установлены поворотные в вертикальной плоскости, проходящей через ось поворота поводка 3 и вертикальные оси соответствующих проходных роликов 15, подпружиненные рычаги. На концах поелёЙних смонтированы ограничительные пальцы, расположенные с зазором относительно внешних кромок проходных роликов 15, и управляющие ролики, установленные с возможностью взаимодействия с упором поводка 3. Со средней частью барабана 9 и поводком 3 в зоне его соединения с платформой 1 закреплен бесконечно-замкнутый тяговый элемент 10, уложенный в винтовую канавку барабана 9 и охватывающий отклоняющий 17, обводные 13, 14 и проходные 15 ролики. 6 ил.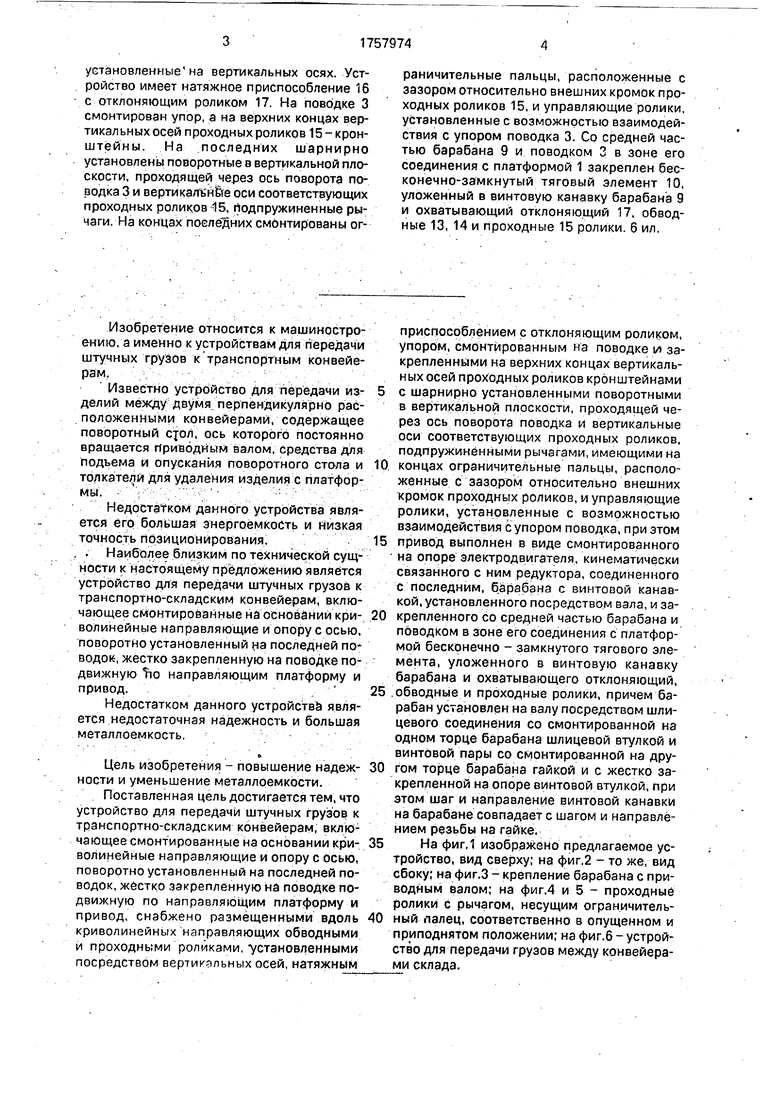

| название | год | авторы | номер документа |
|---|---|---|---|
| ОБЛИЦОВОЧНЫЙ МАНИПУЛЯТОР | 1990 |
|
RU2023582C1 |
| Устройство для отпирания замка крышки люка вагона | 1988 |
|
SU1579854A1 |
| Грузоподъемная площадка крана штабелера | 1985 |
|
SU1315367A1 |
| Тележка для транспортирования груза | 1984 |
|
SU1171388A1 |
| Автоматизированный склад | 1978 |
|
SU710874A1 |
| Привод рабочего органа сельскохозяйственной машины | 1982 |
|
SU1245250A3 |
| Подвесная канатная дорога для транспортировки груза | 1969 |
|
SU555034A1 |
| ЛЕСТНИЧНЫЙ ПОДЪЕМНИК ДЛЯ ИНВАЛИДОВ | 1997 |
|
RU2116238C1 |
| СТЕНД ДЛЯ ПЕРЕМОТКИ ТРОСА | 2022 |
|
RU2788263C1 |
| ГРУЗОПОДЪЕМНЫЙ СТОЛ | 2008 |
|
RU2385284C1 |
Сущность изобретения: на основании смонтированы криволинейные направляю1 &7 Л 7 Фиг1 щие 6 и опора 5 с осью 4. На оси 4 поворотно установлен поводок 3, на котором жестко закреплена подвижная по криволинейным направляющим 6 платформа 1. На опоре 5 смонтирован привод, выполненный в виде электродвигателя 7, с которым кинематически связан редуктор 8. С редуктором 8 соединен барабан 9, выполненный с винтовой канавкой и установленный на валу через шлицевое соединение и винтовую пару. На одном торце барабана 9 смонтирована шли- цевая втулка, а на другом - гайка винтовой пары. Винтовая втулка последней закреплена на опоре 5. Шаг и направление винтовой канавки на барабане 9 совпадает с шагом и направлением резьбы на гайке. Вдоль криволинейных направляющих 6 размещены обводные 13, 14 и проходные 15 ролики, сл
Изобретение относится к машиностроению, а именно к устройствам для передачи штучных грузов к транспортным конвейерам.
Известно устройство для передачи изделий между двумя перпендикулярно расположенными конвейерами, содержащее поворотный стол, ось которого постоянно вращается приводным валом, средства для подъема и опускания поворотного стала и толкатели для удаления изделия с платформы.
Недостатком данного устройства является его большая энергоемкость и низкая точность позиционирования. . . Наиболее близким по технической сущности к настоящему предложению является устройство для передачи штучных грузов к транспортно-складским конвейерам, включающее смонтированные на основании криволинейные направляющие и опору с осью, поворотно установленный на последней по водок, жестко закрепленную на поводке подвижную rio направляющим платформу и привод.
Недостатком данного устройства является недостаточная надежность и большая металлоемкость,
6
Цель изобретения - повышение надежности и уменьшение металлоемкости.
Поставленная цель достигается тем, что устройство для передачи штучных грузов к трзнспортно-складским конвейерам, включающее смонтированные на основании криволинейные направляющие и опору с осью, поворотно установленный на последней поводок, жестко закрепленную на поводке подвижную по направляющим платформу и привод, снабжено размещенными вдоль криволинейных направляющих обводными и проходными роликами, установленными посредством вертикальных осей, натяжным
приспособлением с отклоняющим роликом, упором, смонтированным на поводке и закрепленными на верхних концах вертикальных осей проходных роликов кронштейнами
с шарнирно установленными поворотными в вертикальной плоскости, проходящей через ось поворота поводка и вертикальные оси соответствующих проходных роликов, подпружиненными рычагами, имеющими на
концах ограничительные пальцы, расположенные с зазором относительно внешних кромок проходных роликов, и управляющие ролики, установленные с возможностью взаимодействия с упором поводка, при этом
привод выполнен в виде смонтированного на опоре электродвигателя, кинематически связанного с ним редуктора, соединенного с последним, барабана с винтовой канавкой, установленного посредством вала, и закрепленного со средней частью барабана и поводком в зоне его соединения с платформой бесконечно - замкнутого тягового элемента, уложенного в винтовую канавку барабана и охватывающего отклоняющий,
обводные и проходные ролики, причем барабан установлен на валу посредством шли- цевого соединения со смонтированной на одном торце барабана шлицевой втулкой и винтовой пары со смонтированной на другом торце барабана гайкой и с жестко закрепленной на опоре винтовой втулкой, при этом шаг и направление винтовой канавки на барабане совпадает с шагом и направлением резьбы на гайке.
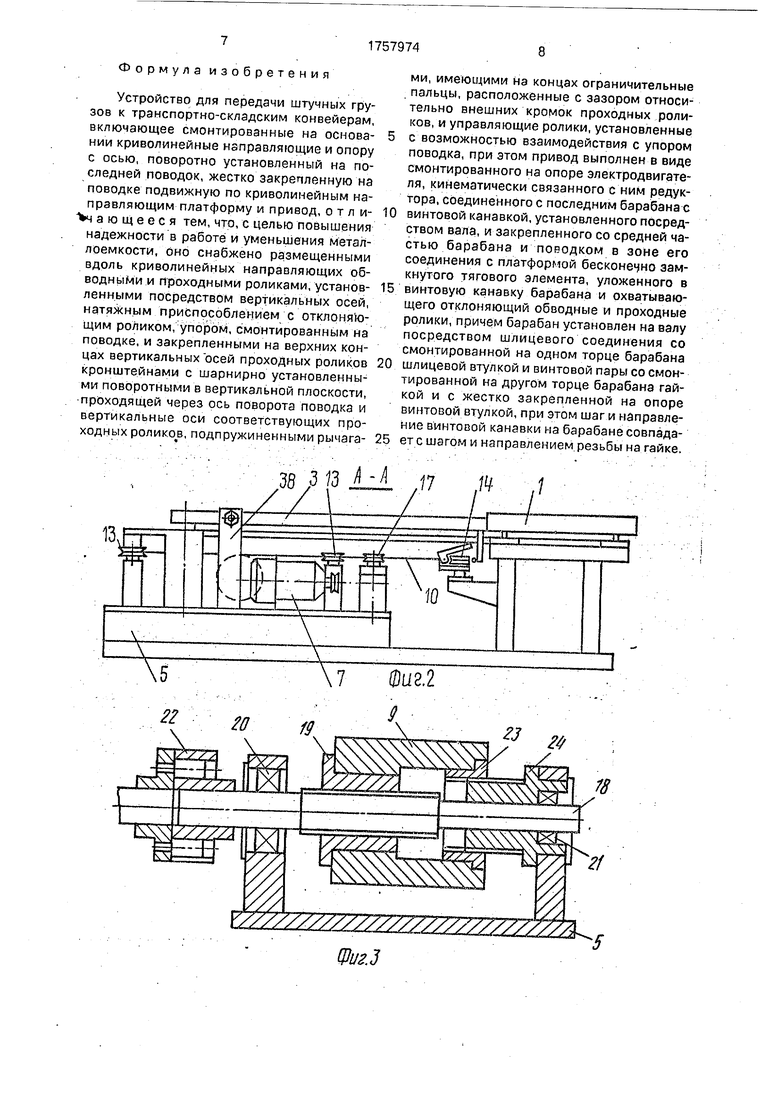
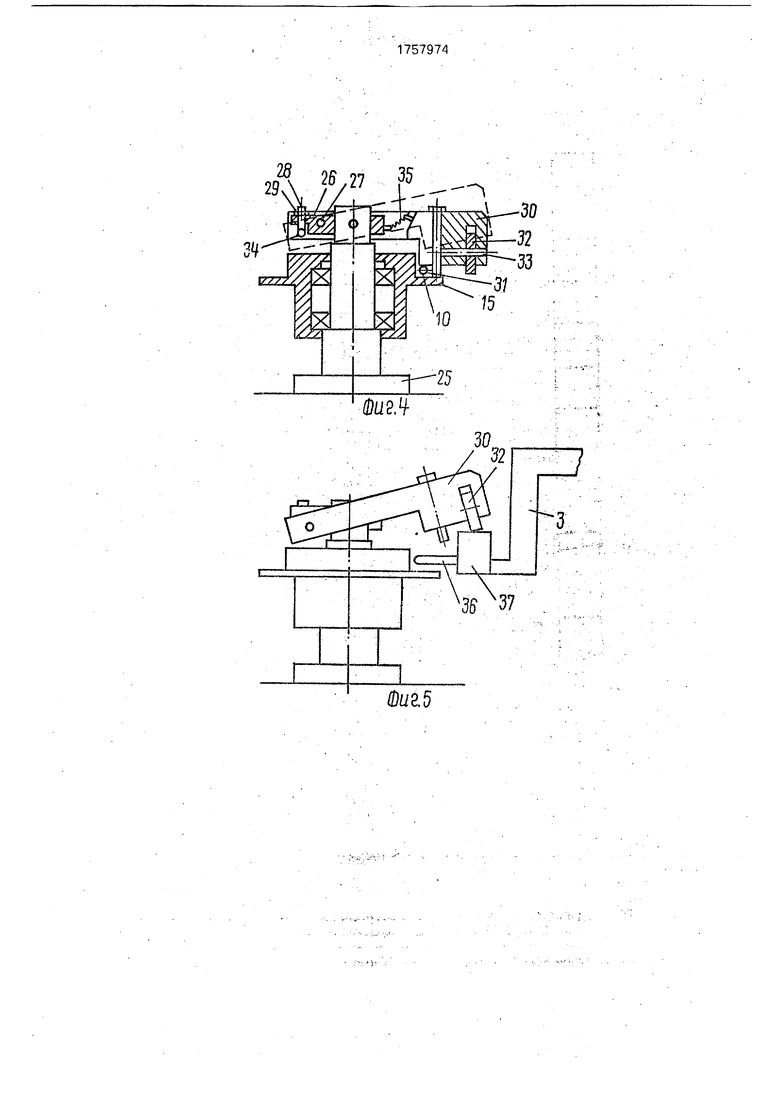
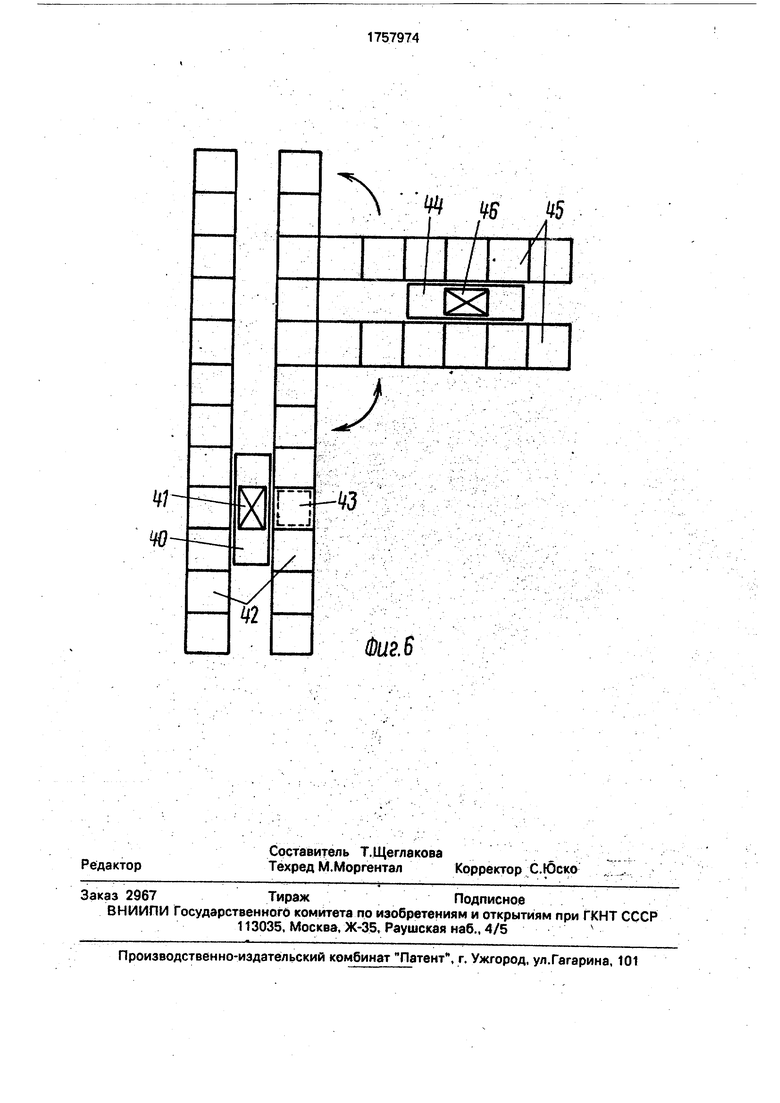
На фиг,1 изображено предлагаемое устройство, вид сверху; на фиг.2 - то же, вид сбоку; на фиг.З - крепление барабана с приводным валом; на фиг,4 и 5 - проходные ролики с рычагом, несущим ограничительный палец, соответственно в опущенном и приподнятом положении; на фиг.б - устройство для передачи грузов между конвейерами склада.
Устройство содержит платформу 1, снабженную роликами 2 и поводком 3, установленную с возможностью поворота вокруг оси 4, жестко закрепленной на дополнительной опоре 5. Ролики 2 перемещают платформу 1 вдоль криволинейных направляющих б, жестко смонтированных на основании. Привод содержит электродвигатель 7, редуктор 8. барабан 9, гибкий тяговый элемент 10. Двигатель 7 кинематически связан с червячным редуктором 8 клиноременной передачей 11 и предохранительной муфтой 12.
Гибкий тяговый элемент 10 замкнут в контур, образованный навивкой барабана 9, ветвями каната между барабаном 9 и обкатными роликами 13 и 14, ветвями ме жду, проходными роликами 15.
Тяговый контур снабжен натяжным механизмом 16 с отклоняющим роликом 17. Тяговый элемент 10 жестко закреплен на барабане в центральной части.
Барабан 9 смонтирован на валу 18 с возможностью поступательного перемещения, которое обеспечивается шлицевой втулкой 19, установленной на одном торце барабана.
Вал 18 смонтирован в двух шариковых опорах 20 и 21 на дополнительной опоре 5. Со стороны опоры 20 вал 18 соединен с редуктором 8 эластичной муфтой 22. На другом торце барабана 9 закреплена гайка 23 с возможностью винтового перемещения по винтовой втулке 24, жестко закрепленной на крайней опоре 21 вала.
Шаг и направление винтовой канавки на внешней поверхности барабана совпадает с шагом и направлением резьбы на гайке 23.
Проходной ролик 15 смонтирован на неподвижной оси 25, установленной на основании с возможностью вращения относительно нее.
На верхнем конце неподвижной оси 25 закреплен кронштейн 26, несущий ось 27 и упорный винт 28 с контргайкой 29. Кронштейн 26 охватывается боковыми выступами рычага 30, установленного на оси 27 с возможностью поворота в вертикальной плоскости, проходящей через ось 4 поворота поводка 3 и ось соответствующего проходного ролика 15. На конце рычага 30 установлен ограничительный палец 31 и ролик 32, закрепленный с возможностью поворота относительно оси 33.
С противоположной стороны рычага 30 установлен штифт 34, между кронштейном 26-и рычагом 30 установлена пружина растяжения 35.
На поводке 3 смонтирован узел крепления 36 гибкого тягового элемента и управля- ющий упор 37 с возможностью взаимодействия с роликом 32 рычага 30. Кроме того, на дополнительной опоре 5
смонтированы регулируемые упоры 38 и 39, ограничивающие крайние положения поворота поводка 3.
Устройство работает следующим обра0 зом.
Кран-штабелер 40 забирает телескопическим захватом 41 из любой ячейки стеллажей 42 груз 43 и устанавливает на платформу 1. После срабатывания датчиков
5 наличия груза на платформе 1 (не показано) включается электродвигатель 7. При этом вращение через клиноременную передачу 11, предохранительную муфту 12, червячный редуктор 8, эластичную муфту, вал 18
0 передается барабану 9, который вращается и наматывает на себя правую ветвь гибкого тягового элемента 10 (набегающая ветвь) (см. фиг.1), а левую - сматывает (сбегающая ветвь).
5 Причем барабан 9 вращаясь вместе с гайкой 23 вокруг винтовой втулки 24 получает осевое перемещение в сторону, обратную направлению намотки, сохраняя положения набегающей и сбегающей ветвей тягового
0 элемента 10 в пространстве и постоянство длины контура.
Перемещение гибкого тягового элемента через узел крепления 36 приводит в движение поводок 3, который перекатывает
5 платформу 1 с грузом 43 по криволинейным направляющим 6.
При подходе к проходным роликам 15 расположенный на поводке 3 упор 37 наезжает на ролик 32 рычага 30 и приподнимает
0 палец 31, освобождая проход для узла крепления.
После прохода ролика 15 поддействием пружины 35 рычаг30 поворачивается вокруг оси 27 до взаимодействия штифта 34 с упор5 ным винтом 28, возвращаясь в исходное положение.
При подходе платформы 1 в позицию действия каретки-оператора 44 срабатывает датчик крайнего положения (не показан)
0 включает электродвигатель 7. При этом поводок 3 наезжает на жесткий упор 39 и дожимается к нему инерцией механизмов и движущихся частей.
Предохранительная муфта 12 предохра5 няет механизм от поломки при движении на жесткий упор. Каретка-оператор 44, обслуживающая линию 345 в зоне поступления груза, телескопическим захватом 46 снимает груз и перемещает его в адрес назначения.
Формула изобретения
Устройство для передачи штучных грузов к транспортно-складским конвейерам, включающее смонтированные на основа- 5 нии криволинейные направляющие и опору с осью, поворотно установленный на последней поводок, жестко закрепленную на поводке подвижную по криволинейным направляющим платформу и привод, о т л и- 10 ающееся тем, что, с целью повышения надежности в работе и уменьшения металлоемкости, оно снабжено размещенными вдоль криволинейных направляющих обводными и проходными роликами, установ- 15 ленными посредством вертикальных осей, натяжным приспособлением с отклоняющим роликом, упором, смонтированным на поводке, и закрепленными на верхних концах вертикальных осей проходных роликов 20 кронштейнами с шарнирно установленными поворотными в вертикальной плоскости, проходящей через ось поворота поводка и вертикальные оси соответствующих проходных роликов, подпружиненными рычага- 25
ЮЛ31-1 ,п Л ,/
5
j фШ.
Y7777/7//77777S/7///sy///S/S7A,
ми, имеющими на концах ограничительные пальцы, расположенные с зазором относительно внешних кромок проходных роликов, и управляющие ролики, установленные с возможностью взаимодействия с упором поводка, при этом привод выполнен в виде смонтированного на опоре электродвигателя, кинематически связанного с ним редуктора, соединенного с последним барабана с винтовой канавкой, установленного посредством вала, и закрепленного со средней частью барабана и поводком в зоне его соединения с платформой бесконечно замкнутого тягового элемента, уложенного в винтовую канавку барабана и охватывающего отклоняющий обводные и проходные ролики, причем барабан установлен на валу посредством шлицевого соединения со смонтированной на одном торце барабана шлицевой втулкой и винтовой пары со смонтированной на другом торце барабана гайкой и с жестко закрепленной на опоре винтовой втулкой, при этом шаг и направление винтовой канавки на барабане совпадает с шагом и направлением резьбы на гайке.
/fej
s
ч- r о
f-
ю rсо
Л
w w w
Фиг.6
| Регулятор давления | 1985 |
|
SU1302900A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
| Контрольный висячий замок в разъемном футляре | 1922 |
|
SU1972A1 |
| 0 |
|
SU156096A1 | |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
