10
Изобретение относится к приборостроению и может быть использовано для контроля качества изготовления и сборки газодинамических подшилнико- ( вых узлов.
Целью изобретения является расширение функциональных возможностей путем определения интегральной характеристики сухого трения.
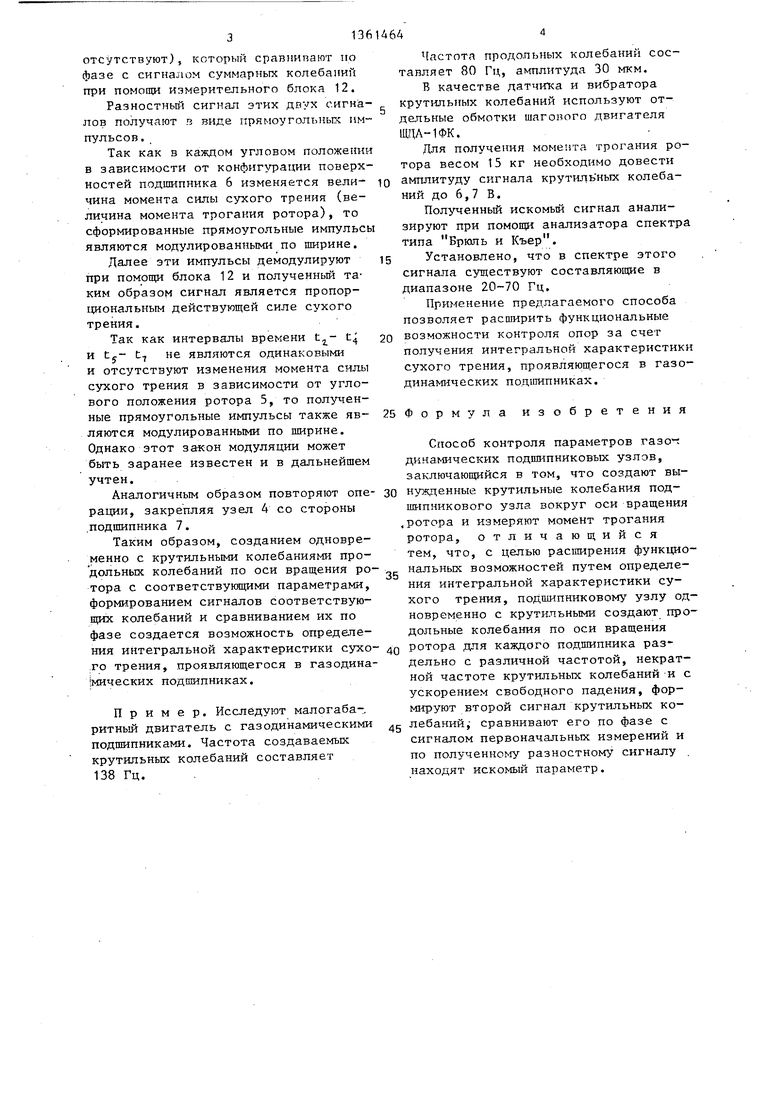
На фиг.1 представлена функ щональ- ная схема, реализующая предлагаемьш способ; на фиг,2 - зависимости дейст- -вующих моментов во времени, где момент силы сухого трения, когда продольные колебания отсутствуют, М,- когда действуют продольные колебания, возбуждаемый момент крутильных колебаний, когда продольные колебания
15
Одновремепно при помогу блока 13 основанию 1, на котором стоит указанная колебательная система, создают продольные колебания по оси вращения ротора 5 с различной частотой, некратной частоте крутильных колебаний, и с ускорением, близким к ускорению свободно1 о падения.
Из-за наличия контакта между поверхностями под 1 ипника 6 в нем действует момент силы сухого трения относительно оси вращения ротора. Под действием продольньск колебаний по оси вращения ротора 5 с ускорением, близким к ускорению свободного падения, этот момент в подшипнике 6 становится переменным, так как при движении узла 4, например, вверх на
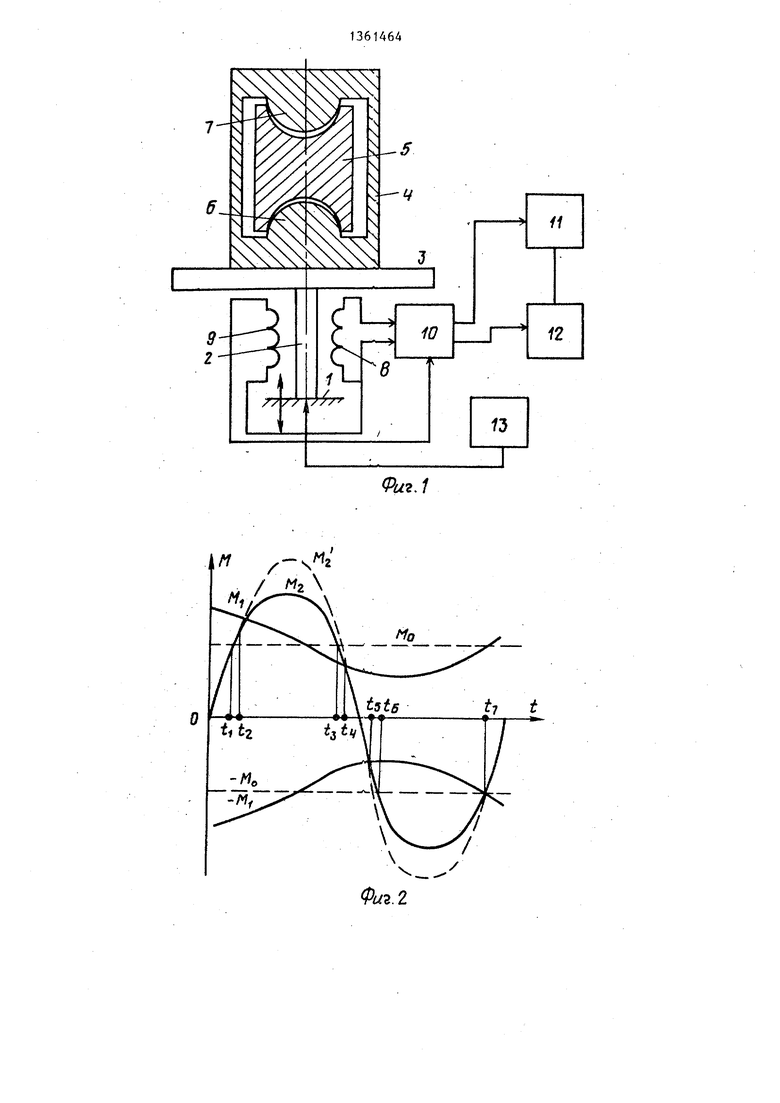
дольные колебания; на фиг„3 - временные диаграммы соответствующих сигналов, где Ua (MZ) сигнал от момента М
отсутствуют, когда действуют про- 20 подигипник 6 действует сила тяжести
ротора 5 и инерционная сила от действующих продольных колебаний а при движении вниз действие этих сил в зависимости от величины ускорения продольных колебаний.уменьшается. При достижении возбуждаемого мои Uj, (м) 5 и,2. демодулированный сиг- мента крутильных колебаний М величины момента силы сухого трения М, ротор 5 проскальзывает относительно
2
и (Мр - сигнал от момента М,
разностный сигнал в виде прямоугольных импульсов от сигналов U (М)
31
25
нал и
(
30
корпуса 4 (момент трогания ротора), так как они являются противоположных знаков.
В связи с- этим резко изменяется амплитуда крутильньгк колебаний, кото 35 рая при уменьшении момента М также уменьшается, и когда величина возбуждаемого момента П становится меньшей момента М,, ротор 5 начинает двигаться вместе с. корпусом 4. Анало
Функциональная схема содержит основание 1, торсионный вал 2, одним концом скрепленный с основанием 1, планшайбу 3, выполненную на втором конце вала 2, а также исследуемьм подшипниковьй узел 4, ротор 5 которого установлен на газодинаг ических подшипниках 6 и 7.
Кроме того, схема содержит датчик 8 и вибратор 9 крутильных колебаний вала 2, усилитель 10, через когорьм датчик 8 и вибратор 9 соединены поло- 40 гичнь1м образом происходит движение жительной обратной связью, формиро- ротора и в другом полупериоде кру- ватель 11, подключенный на одном из тильных колебаний.
выходов усилителя 10, измерительный Здесь ротор 5 определенное время блок 12, соединенный с выходом формирователя 11 и другим выходом усилите- 45 ля 10, а также блок 13 для создания продольных колебаний основания 1.
Способ реализуется следующим образом.
Исследуемый подшипниковый узел 4 закрепляют на планшайбе 3 со стороны
также проскальзывает относительно корпуса.
Так как частота продольных колеба ний отличается от частоты крутильных колебаний и не является кратной этой
50
зывания ротора 5 в указанных полупериодах не являются одинаковыми и ротор в каждом периоде крутильных коле баний займет другое угловое положение, в котором повторится аналогично 55 его движение,.
одного, например 6, газодинамического подшипника.
При помощи датчиков 8 и 9, соединенных положительной обратной связью через усилитель 10, создают к рутиль- ные колебания системе торсионный вал 2- - планшайба 3 - узел 4 на собственной частоте.
Одновремепно при помогу блока 13 основанию 1, на котором стоит указанная колебательная система, создают продольные колебания по оси вращения ротора 5 с различной частотой, некратной частоте крутильных колебаний, и с ускорением, близким к ускорению свободно1 о падения.
Из-за наличия контакта между поверхностями под 1 ипника 6 в нем действует момент силы сухого трения относительно оси вращения ротора. Под действием продольньск колебаний по оси вращения ротора 5 с ускорением, близким к ускорению свободного падения, этот момент в подшипнике 6 становится переменным, так как при движении узла 4, например, вверх на
корпуса 4 (момент трогания ротора), так как они являются противоположных знаков.
В связи с- этим резко изменяется амплитуда крутильньгк колебаний, кото- рая при уменьшении момента М также уменьшается, и когда величина возбуждаемого момента П становится меньшей момента М,, ротор 5 начинает двигаться вместе с. корпусом 4. Аналогичнь1м образом происходит движение ротора и в другом полупериоде кру- тильных колебаний.
Здесь ротор 5 определенное время
также проскальзывает относительно корпуса.
Так как частота продольных колебаний отличается от частоты крутильных колебаний и не является кратной этой
50
зывания ротора 5 в указанных полупериодах не являются одинаковыми и ротор в каждом периоде крутильных колебаний займет другое угловое положение, в котором повторится аналогичное 55 его движение,.
При помошд форшфователя 11 формируют синусоидальный сигнал (он соответствовал бы сигналу крутш:;ьных колебаний, когда продольные колебания
отсутствуют), который сравяипают по фазе с сигналом суммарных колебаний при помощи измерительного блока 12.
Разностньв сигнал этих двух сигналов получают в виде прямоугольных импульсов.
Так как в каждом угловом положении в зависимости от конфигурации поверхностей подшипника 6 изменяется вели- чина момента силы сухого трения (величина момента трогания ротора), то сформированные прямоугольные импульсы являются модулированными по ширине.
Далее эти импульсы демодулируют при помощи блока 12 и полученный таким образом сигнал является пропорциональным действующей силе сухого трения.
Так как интервалы времени t и tj- t не являются одинаковыми и отсутствуют изменения момента силы сухого трения в зависимости от углового положения ротора 5, то полученные прямоугольные импульсы также яв- ляются модулированными по ширине. Однако этот закон модуляции может быть заранее известен и в дальнейшем учтен.
Аналогичным образом повторяют one- рации, закрепляя узел 4 со стороны .подшипника 7.
Таким образом созданием одновременно с крутильными колебаниями продольных колебаний по оси вращения ротора с соответствукяцими параметрами, формированием сигналов соответствующих колебаний и сравниванием их по фазе создается возможность опредепе- ния интегральной характеристики сухо- ,го трения, проявляющегося в газодина- мических подшипниках.
Пример. Исследуют малогаба-. ритный двигатель с газодинамическими подшипниками. Частота создаваемых крутильных колебаний составляет 138 Гц.
5
О
о
g
5
Частота продольных колебаний составляет 80 Гц, амплитуда 30 мкм.
В качестве датчшса и вибратора крут -тьных колебаний используют отдельные обмотки шагового двигателя ВДА-1ФК.
Для получения момента трогания ротора весом 15 кг необходимо довести амплитуду сигнала крутиль ньгх колебаний до 6,7 В.
Полученный искомый сигнал анализируют при помош анализатора спектра типа Бркшь и Къер.
Установлено, что в спектре этого сигнала существуют составляющие в диапазоне 20-70 Гц.
Применение предлагаемого способа позволяет расширить функциональные возможности контроля опор за счет получения интегральной характеристики сухого трения, проявляющегося в газодинамических подитпниках.
Формула изобретения
Способ контроля параметров газо-: динa ичecкиx подшипниковых узлов, заключающийся в том, что создают вынужденные крутильные колебания подшипникового узла вокруг оси вращения .ротора и измеряют момент трогания ротора, отличающийся тем, что, с целью расширения функциональных возможностей путем определения интегральной характеристики сухого трения, подшипниковому узлу одновременно с крутильными создают продольные колебания по оси вращения ротора для каждого подшипника раздельно с различной частотой, некратной частоте крутильных колебаний и с ускорением свободного падения, формируют второй сигнал крутильных колебаний,- сравнивают его по фазе с сигналом первоначальных измерений и по полученному разностному сигналу . находят искомый параметр.
Фи.1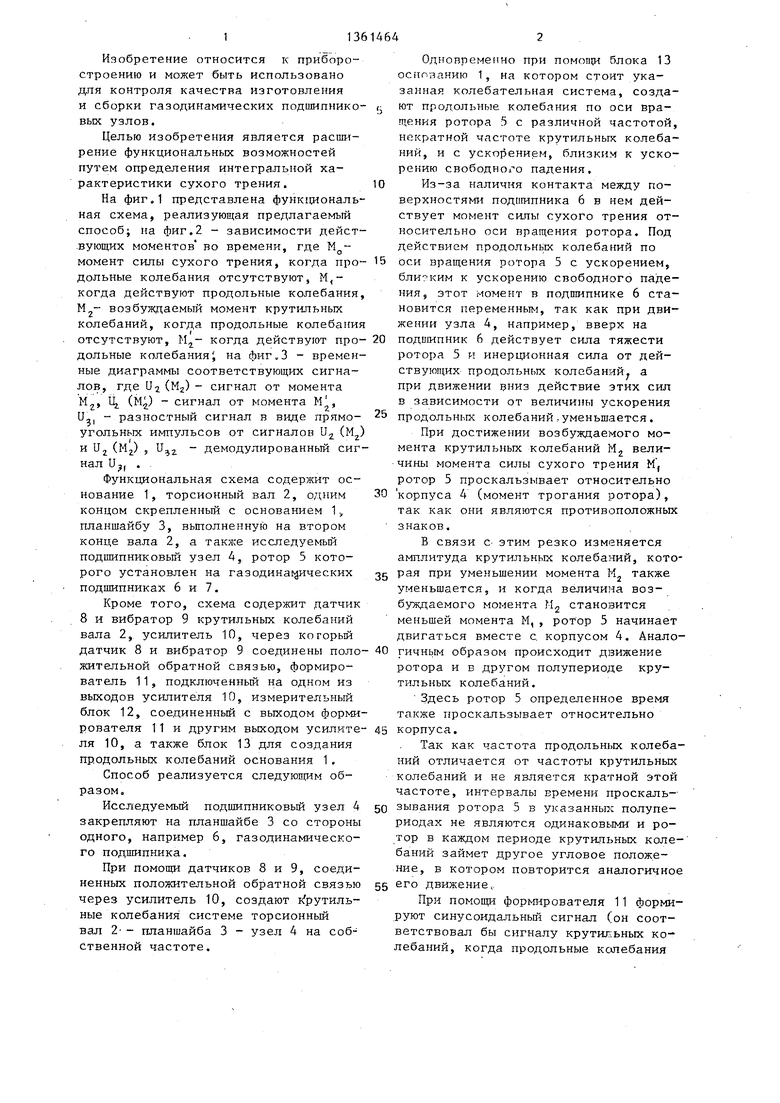
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ контроля качества подшипниковых узлов | 1985 |
|
SU1323894A1 |
| Способ измерения жесткости подшипникового узла | 1984 |
|
SU1157384A1 |
| Способ оценки качества подшипников | 1985 |
|
SU1275252A1 |
| Способ контроля качества сборки подшипниковых узлов | 1986 |
|
SU1388739A1 |
| Способ оценки технического состояния подшипников | 1984 |
|
SU1163181A1 |
| Электодинамический возбудитель продольных и крутильных колебаний | 1979 |
|
SU863011A1 |
| Способ контроля качества сборки газодинамических подшипниковых узлов | 1987 |
|
SU1423925A1 |
| Устройство для диагностики приборов | 1981 |
|
SU1065713A1 |
| Способ контроля качества газодинамических подшипниковых узлов | 1988 |
|
SU1580206A1 |
| АЛГОРИТМ ГАРАНТИРОВАННОГО ТРОГАНИЯ ШАГОВОГО ЭЛЕКТРОДВИГАТЕЛЯ МОДУЛЯЦИОННОГО ГИРОСКОПА | 2008 |
|
RU2391629C2 |
Изобретение относится к области приборостроения и может быть использовано для контроля качества изготовления и сборки газодинамических подшипниковых узлов (ПУ)о Целью изобретения является расширение функциональных возможностей путем определения интегральной характеристики сухо го трения. Способ основан на определении момента трогания ротора по параметрам сигнала от создаваемых ПУ крутильных колебаний вокруг оси вращения ротора. В процессе измерения ПУ одновременно с крутильньп-ш создают продольные колебания по оси вращения ротора для каждого подшипника раздельно с различной частотой, некратной частоте крутильных колебаний и с ускорением, близким к ускорению свободного падения. Формируют второй сигнал крутильных колебаний, сравнивают его по фазе с сигналом первоначальных измерений и по полученному разностному сигналу находят иско1-1ьш параметр. 3 ил. и
/
Uz
ai(Mt}
и.
Редактор С. Пекарь
Составитель В. Пучинский
Техред А.Кравчук Корректор И. Эрдейи
Заказ 6219/44Тираж 776 Подписное
ВНИШШ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
Фи.ъ
| Устройство для диагностики приборов | 1981 |
|
SU1065713A1 |
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
