Изобретение относится к гироскопии и, в частности, к алгоритму трогания шагового электродвигателя датчика угловой скорости на базе модуляционного гироскопа и может быть использовано в системах инерциального управления объектами бескарданного типа.
В настоящее время известен датчик угловой скорости на базе модуляционного гироскопа (см. патент RU 2276773 С2, 25.05.2004 года). Уникальность такого датчика угловой скорости состоит в том, что в нем принципиально отсутствует тренд (медленное изменение точностного параметра во времени) и гистерезис. Независимость точности модуляционного гироскопа от его кинетического момента (в первом приближении) принципиально отличает этот ДУС (датчик угловой скорости) от других существующих ДУСов.
Однако, как показала практика работы с таким ДУСом, примененный в нем электродвигатель шагового типа, служащий для вращения ротора ДУСа, а также газодинамические сферические опоры (ГДО), используемые вместо шарикоподшипниковых опор, ресурс которых в сотни раз меньше, имеет существенный недостаток: нестабильность запуска ГДО с шаговым двигателем. Применение же синхронной гистерезисной электрической машины в данном ДУСе недопустимо из-за нестабильности электромагнитной составляющей вибротяжения от пуска к пуску. В отличие от двигателя шагового типа, где постоянные магниты жестко привязаны к моментам инерции ротора от пуска к пуску, в синхронной гистерезисной машине после каждого очередного пуска вектор электромагнитной составляющей вибротяжения (вектор намагниченности викаллоя) занимает разное положение после вхождения двигателя в синхронизм по отношению к моментам инерции ротора. Доля такой погрешности доходит до 20-30% от суммарного случайного ухода (дрейфа) ДУСа. Поэтому в модуляционном ДУСе (ДУСе на базе модуляционного гироскопа) случайный дрейф от пуска к пуску такой же, как и в пуске.
В модуляционном ДУСе установлен шаговый электродвигатель (ШЭД), имеющий число пар полюсов р=9; число фаз m=2 и соответственно угловой шаг  . Каждый полюс ротора состоит из двух последовательных постоянных магнитов, между которыми в воздушном зазоре установлены фазные обмотки статора. Фазные обмотки не имеют собственного сердечника и расположены в разных плоскостях воздушного зазора. Электрическая схема фазных обмоток представлена на фигуре 1.
. Каждый полюс ротора состоит из двух последовательных постоянных магнитов, между которыми в воздушном зазоре установлены фазные обмотки статора. Фазные обмотки не имеют собственного сердечника и расположены в разных плоскостях воздушного зазора. Электрическая схема фазных обмоток представлена на фигуре 1.
Пуск такого ШЭД осуществляется постепенным увеличением частоты напряжения питания при соблюдении прямой последовательности направления вращения:
+2, -1, -2, +1; +2, -1 и т.д.
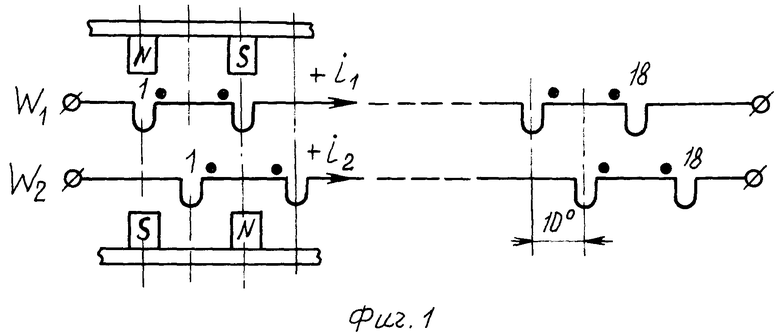
На фигуре 2 представлены графические зависимости вращающего момента ротора Мвр. от угла положения ротора α при постоянном токе в одной фазной обмотке Мвр.=К·I·f (α).
С учетом двух обмоток и двух направлений тока таких зависимостей существует четыре:
М+1=К·I·f+1 (α)
M-1=K·I·f-1 (α)
М+2=К·I·f+2 (α)
М-2=К·I·f-2 (α)
На фигуре 2 за нулевой угол α принято положение ротора в точке устойчивого равновесия +У1, в которую стремится ротор при прохождении по обмотке W1 постоянного тока положительного направления. При этом же токе при α=20° возникает точка неустойчивого равновесия +НУ1, из которой ротор стремится уйти в ту или другую сторону, а при точном расположении на +НУ1 - остается на месте.
Большая крутизна графика f (α) в районе сил выталкивания (+НУ1), по сравнению с его крутизной в районе сил втягивания (+У1), объясняется геометрической формой фазных обмоток.
Основным недостатком рассмотренного ШЭД является зависимость пуска от исходного углового положения ротора, которое является чисто случайно возникшим при остановке ротора после, от предыдущего вращения. Например, при нахождении неподвижного ротора в точке +НУ2 и использовании прямой последовательности, начинающейся с +2, пуск будет или невозможен (Мвр.=0), или первый пусковой момент может быть направлен в обратную сторону. Для устранения этого недостатка и обеспечения гарантированного трогания электродвигателя в прямом направлении ротор ШЭД должен быть предварительно установлен в оптимальное положение. Таким оптимальным положением ротора для приведенной выше последовательности включения является точка устойчивого равновесия +У1 (см. фигуру 2) и ее окрестности. Оптимальность точки +У1 определяется наличием первого положительного момента +2, а также отсутствием продольных сил, увеличивающих момент трогания на газодинамических сферических опорах модуляционного гироскопа.
Продольные силы вдоль оси ротора гироскопа Fпрод. для токов +1 и +2 приведены в уменьшенном масштабе на фигуре 2.
Предлагаемый алгоритм трогания ШЭД гарантирует предварительную установку ротора в выбранную оптимальную точку из любого случайного углового положения. Предварительная установка ротора осуществляется за счет поочередной подачи на фазные обмотки статора коротких постоянных сигналов, величина которых должна быть достаточна для преодоления момента трогания, а длительность должна быть больше времени возникшего затухающего переходного процесса колебаний ротора вокруг точки устойчивого равновесия. Например, установка в оптимальную точку +У1 может быть осуществлена предварительной подачей постоянного сигнала типа +1, но при этом необходимо учесть, что ротор придет в точку +У1 со всех положений, кроме положения НУ1 и его ближайших окрестностей. Чтобы исключить такой вариант, необходимо подать постоянный сигнал типа +2. Таким образом, подача постоянных сигналов с последовательностью:
+2, +1
гарантирует установку ротора в исходное положение, обеспечивающее пуск ШЭД в прямом направлении вращения при соблюдении прямой последовательности, начинающейся с +2.
Из анализа других возможных вариантов подачи первого пускового импульса можно сделать общий вывод, что для гарантированного трогания ШЭД ротор необходимо предварительно установить в оптимальную точку трогания. Для этого необходимо на обмотки статора подать друг за другом два постоянных коротких сигнала. Первый сигнал по полярности и обмотке должен соответствовать первому по времени пусковому импульсу прямой последовательности вращения, а второй сигнал по обмотке и полярности должен соответствовать последнему импульсу в цикле прямой последовательности вращения.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ИЗМЕРЕНИЯ ПРОЕКЦИЙ ГОРИЗОНТАЛЬНОЙ СОСТАВЛЯЮЩЕЙ ВЕКТОРА УГЛОВОЙ СКОРОСТИ ВРАЩЕНИЯ ЗЕМЛИ ДЛЯ ОПРЕДЕЛЕНИЯ АЗИМУТАЛЬНОГО НАПРАВЛЕНИЯ (КОМПАСИРОВАНИЯ) | 2005 |
|
RU2300078C1 |
| СИНХРОННО-АСИНХРОННЫЙ ЭЛЕКТРОДВИГАТЕЛЬ С КОРОТКОЗАМКНУТОЙ ОБМОТКОЙ РОТОРА | 1997 |
|
RU2153755C2 |
| Устройство для управления двигателем и коррекции дрейфа гироскопа | 2021 |
|
RU2789116C1 |
| ДАТЧИК УГЛОВОЙ СКОРОСТИ С ТРЕХКРАТНОЙ МОДУЛЯЦИЕЙ ПОЛЕЗНОГО СИГНАЛА НА БАЗЕ МОДУЛЯЦИОННОГО ГИРОСКОПА С ИНДУКЦИОННЫМ ИЗМЕРИТЕЛЕМ МОДУЛЯЦИИ | 2008 |
|
RU2389031C1 |
| СПОСОБ УПРАВЛЕНИЯ ШАГОВЫМ ЭЛЕКТРОПРИВОДОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1992 |
|
RU2092964C1 |
| ПУСКОВОЕ УСТРОЙСТВО БЕСКОНТАКТНЫХ ЭЛЕКТРОДВИГАТЕЛЕЙ ПЕРЕМЕННОГО ТОКА | 2011 |
|
RU2461117C1 |
| ШИРОКОДИАПАЗОННЫЙ СТЕНД ДЛЯ КОНТРОЛЯ ИЗМЕРИТЕЛЕЙ УГЛОВОЙ СКОРОСТИ | 2008 |
|
RU2378618C2 |
| ЭЛЕКТРОПРИВОД ДЛЯ СОЗДАНИЯ ВРАЩАТЕЛЬНОГО МОМЕНТА (ЕГО ВАРИАНТЫ) И ЕГО СИСТЕМА УПРАВЛЕНИЯ (ЕЕ ВАРИАНТЫ) | 2005 |
|
RU2322746C2 |
| ИНДУКТОРНЫЙ ЭЛЕКТРОДВИГАТЕЛЬ И СПОСОБ ЕГО УПРАВЛЕНИЯ | 1994 |
|
RU2079951C1 |
| ГИРОСКОПИЧЕСКИЙ ИЗМЕРИТЕЛЬ | 2015 |
|
RU2610389C1 |
Изобретение относится к области приборостроения и может быть использовано в системах инерциального управления движущимися объектами. Технический результат - расширение функциональных возможностей. Для достижения данного результата ротор электродвигателя гироскопа предварительно должен быть установлен в оптимальную точку трогания. Для двухфазного шагового электродвигателя такая установка осуществлена за счет предварительной поочередной подачи на фазные обмотки двух постоянных сигналов. Первый сигнал по обмотке и полярности должен соответствовать первому пусковому импульсу в цикле прямой последовательности вращения, второй сигнал - последнему импульсу в цикле прямой последовательности вращения. 2 ил.
Алгоритм гарантированного трогания двухфазного шагового электродвигателя с активным ротором, частотным разгоном, повышенным моментом трогания и предварительной установкой ротора в угловое положение трогания в прямом направлении вращения для модуляционного гироскопа, отличающийся тем, что гарантированная установка ротора в угловое положение трогания осуществляется фазными обмотками статора за счет подачи в них коротких постоянных сигналов, величина которых достаточна для преодоления момента трогания, а длительность больше времени переходного процесса колебаний ротора вокруг точки устойчивого равновесия, по следующему алгоритму: установочных сигналов должно быть два и подаваться они должны по очереди; при этом первый сигнал по обмотке и полярности должен соответствовать первому пусковому импульсу прямой последовательности вращения, а второй сигнал по обмотке и полярности должен соответствовать последнему импульсу в цикле прямой последовательности вращения.
| ДАТЧИК УГЛОВОЙ СКОРОСТИ НА БАЗЕ МОДУЛЯЦИОННОГО ГИРОСКОПА | 2004 |
|
RU2276773C2 |
| ДИНАМИЧЕСКИ НАСТРАИВАЕМЫЙ ГИРОСКОП | 1988 |
|
RU2101679C1 |
| ГИРОСКОП | 2002 |
|
RU2210735C1 |
| ДИНАМИЧЕСКИ НАСТРАИВАЕМЫЙ ГИРОСКОП | 1999 |
|
RU2178142C2 |

