Изобретение относится к машиностроению, в частности к устройствам для преобразования движений и может быть исноль- зовано, например, для перемещения зато- тонок под пресс с одной позиции на другую.
Цель изобретения - расширение эксплуатационных возможностей путем повышения плавности поворота ведомого звена.
На фиг. 1 изображено устройство для преобразования возвратно-поступательного движения в прерывисто-враш.ательное, об- ший вид; на фиг. 2 - вид А на фиг. 1; на фиг. 3 - разрез Б-Б на фиг. 2; на фиг. 4 - вид В на фиг. 3.
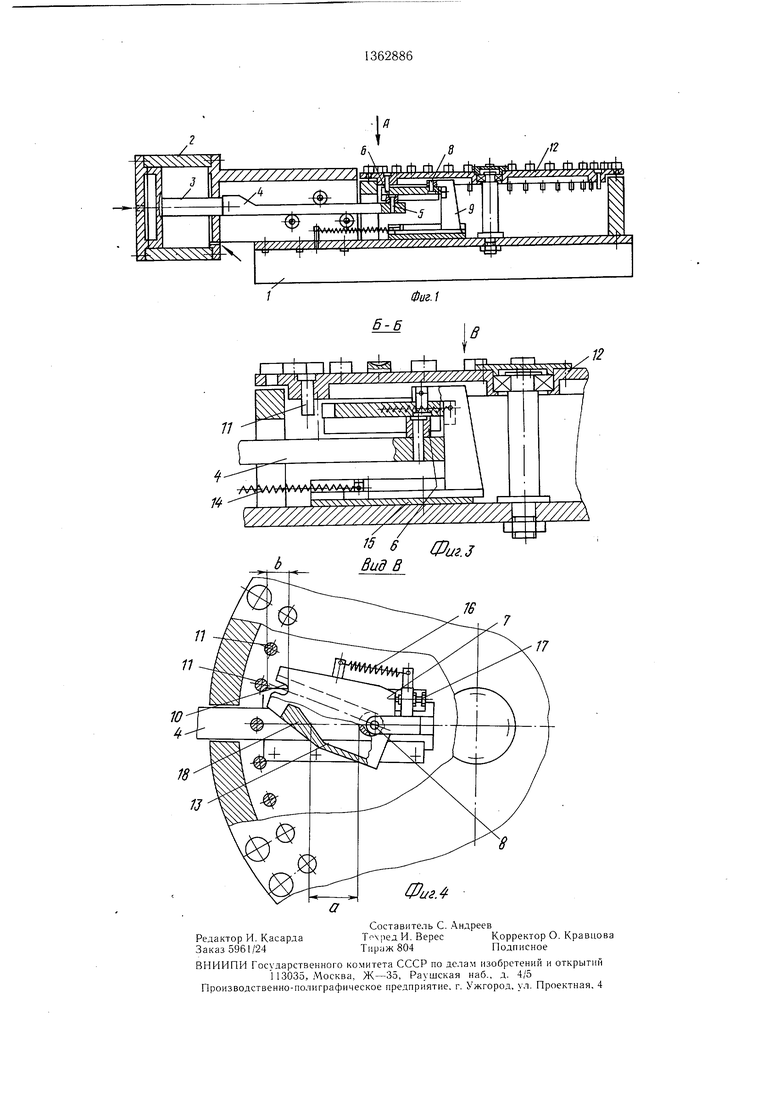
Устройство для преобразования возвратно-поступательного движения в прерывисто- вращательное содержит корпус 1, к кото- )1)му жестко крепится привод 2. например, в виде пневмогидроцилиндра со штоком 3. К штоку 3 присоединено ведущее звено устройства в виде толкателя 4, на конце которого на оси 5 установлен ролик 6, управляющий захватом 7. Последний выполнен в виде пластины, установленной на оси 8 в кронштейне 9. С одной стороны захвата 7 выполнен паз 10 для взаимо- действия с цевками 11 диска 12, а с другой профилированный паз 13, взаимодействующий с роликом 6 и обеспечивающий поворот захвата 7. Перемещение в рабочее положение кронштейна 9 произво- дится с помощью пружины 14 по направляющим 15 корпуса 1, а возврат в исходное положение - с помощью толкателя 4.
Захват 7 подпружинен к кронштейну 9 пружиной 16. Установка захвата 7 в исходное положение производится
мощью упора 17, регулирующего натяжение пружины 16. Для обеспечения взаимодействия паза 10 захвата 7 с цевкой 11 размер а между наружной поверхностью ролика 6 и контактирующей с ним поверхностью 18 профилированного паза 13 дол- жен быть больше или равным размеру в между наружной поверхность О цевки 11 и контактируе мой поверхностью паза 10 захвата 7.
Устройство для преобразования возвратно-поступательного движения в прерывисто- вращательное работает следующим образом.
Подают воздух (масло) в поршневую полость пневмогидропривода 2, шток 3 которого перемещает толкатель 4 в исходное положение. При I OM толкатель Л, растяс
0 ,
0
5
0
5
0
гивая пружину 14, перемещает кронштейн 9 по направляющим 15 вправо в исходное положение. Кронштейн 9, перемещаясь вправо, тянет за собой захват 7, пока он не выходит из зацепления с цевкой 11. После этого захват 7 под действием пружины 16 поворачивается в исходное положение пазом 10 и устанавливается напротив следующей цевки 11. Регулировка установки захвата 7 пазом 10 точно напротив цевки 11 осуществляется с помощью упора 17.
Подают воздух (масло) в штоковую полость пневмогидроиривода 2, шток 3 которого, перемещаясь в рабочее положение, тянет за собой толкатель 4 с роликом 6. При перемещении толкателя 4 в рабочее ноложение за ним под действием пружины 14 перемещается кронщтейн 9. Ролик 6 проходит расстояние а внутри захвата 7. За это время паз 10 захватывает следующую цевку 11. После этого ролик 6, продолжая пере.мещаться по поверхности 18 профилированного паза 13 захвата 7, поворачивает последний Б рабочее положение (на один шаг или центральный угол между рядом стоящими цевками 11). Далее цикл повторяется.
Формула изобретения
Устройство для преобразования возвратно-поступательного движения в прерывисто-вращательное, содержащее корпус с направляющими, ведущее звено, размещенный на нем захват и присоединенную одним концом к захвату пружину, ведомое звено в виде диска и привод, отличающееся тем, что, с целью расщире- ния эксплуатационных возможностей путем повышения плавности поворота ведомого звена, оно снабжено цевками, размещенными на диске вдоль окружности, роликом, установленным на оси в ведущем звене, кронщтейпом, установленным в направляю- , щих корпуса с возможностью поступатель- пого перемещения, и дополнительной пружиной, закрепленной в корпусе и на кронщ- тейне, пружина захвата выполнена регулируемой жесткости и другим концом присоединена к кронштейну, а захват выполнен в виде размещенной на оси в кронш- / теине пластины с двумя пазами, один из которых выполнен для взаимодействия с цевками, а другой - профилированным для взимодействия с роликом.
1
/ j./
jtj й/ш jte sgiti /iti/iti jti-P)
Фиг.
.
11
Б-Б
В
ут.
f г/г/ Вид В
76
17
8
Фиг. 4
Редактор И. Касарда Заказ 5961/24
ВНИИПИ Государственного комитета СССР по делам изобретений и открытий
1 13035, Москва, Ж-35, Раушская наб., д. 4/5 Производственно-ио.чиграфическое предприятие, г. Ужгород, ул. Проектная, 4
Составитель С. Андреев
Тохред И. ВересКорректор О. Кравцова
Тираж 804Подписное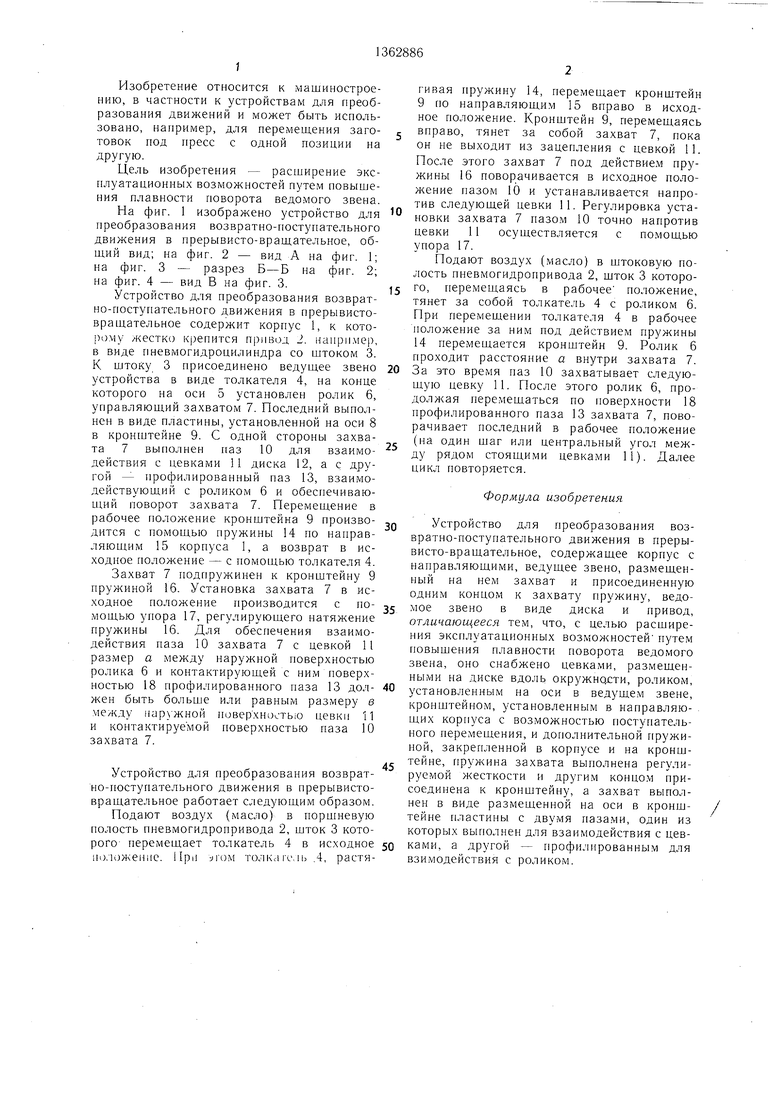
| название | год | авторы | номер документа |
|---|---|---|---|
| РЕГУЛИРУЕМОЕ УСТРОЙСТВО ДЛЯ ПРЕОБРАЗОВАНИЯ ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ В КОЛЕБАТЕЛЬНОЕ | 2005 |
|
RU2307271C1 |
| Мальтийский механизм | 1985 |
|
SU1298462A1 |
| Устройство для преобразования возвратно-поступательного движения в прерывистое вращательное | 1986 |
|
SU1357635A1 |
| МЕХАНИЗМ ДЛЯ ПРЕОБРАЗОВАНИЯ ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ В ПРЕРЫВИСТОЕ ВРАЩАТЕЛЬНОЕ И ВОЗВРАТНО-ПОСТУПАТЕЛЬНОЕ | 1999 |
|
RU2180946C2 |
| Устройство для преобразования возвратно-поступательного движения в прерывистое вращательное | 1987 |
|
SU1430644A1 |
| Механизм для преобразования возвратно-поступательного движения в прерывистое | 1982 |
|
SU1054608A1 |
| Устройство преобразования вращательного движения в возвратно-поступательное для передачи в герметизированную полость | 1981 |
|
SU973978A1 |
| Автомат питания для штучных изделий | 1985 |
|
SU1344578A1 |
| Поворотно-делительный стол | 1990 |
|
SU1773685A1 |
| Роторная машина | 1981 |
|
SU1038040A1 |
Изобретение относится к машиностроению, в частности к устройствам для преобразования движений, и может быть использовано, например, для перемещения заготовок под пресс с одной позиции на другую. Цель изобретения - расширение эксплуатационных возможностей пу- гом иовышеиия плавности цоворога ведомого звена. В исходном положении захват выведен из зацепления с цевкой 11 и находится в крайнем правом положении, повернутым под действием пружины 16. При перемеш,ении толкателя 4 влево за ним иод действием пружины перемепдается по направляющим корпуса кронщтейн, в котором на оси установлен захват 7. При этом паз 10 захвата 7 входит во взаимодействие с цевкой 11 диска 12. Ролик, перемещаясь по поверхности профилированного паза, плавно поворачивает захват 7 и диск 12 на один шаг, равный центральному углу между рядом стоящими цевками. 4 ил. Вида S (Л .со Oi to оо 00 Ci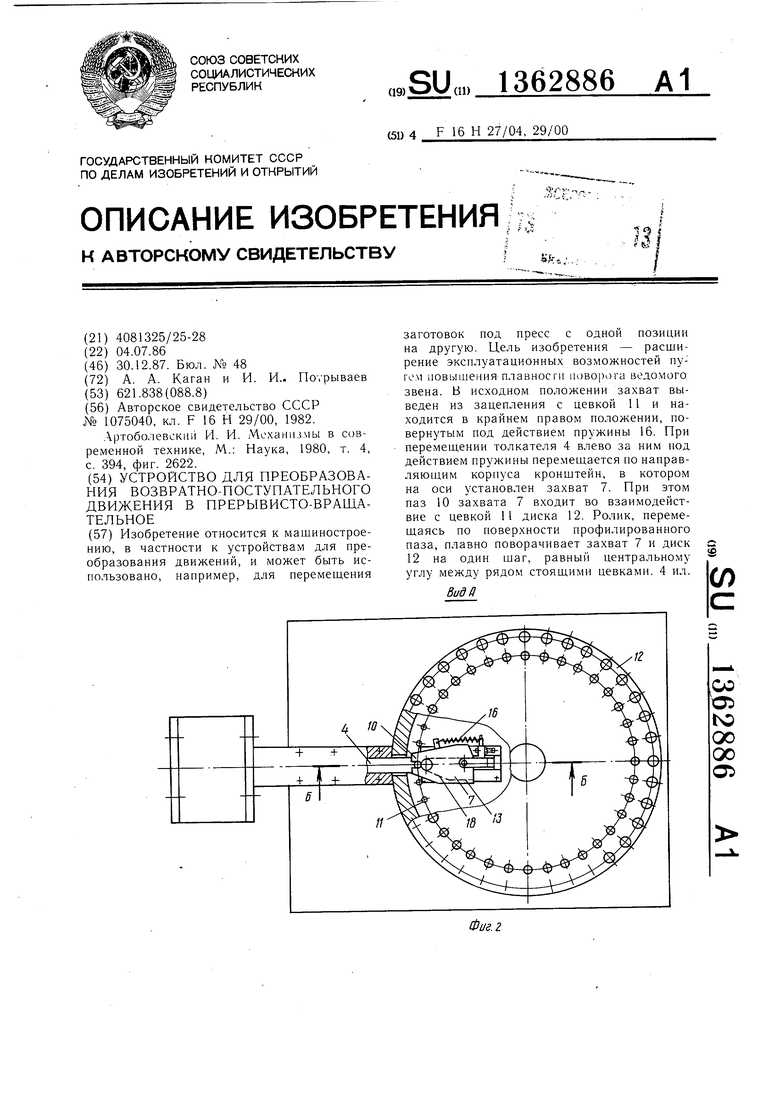
| Механизм шагового поворота | 1982 |
|
SU1075040A1 |
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
| Артоболевский И | |||
| И | |||
| Механизмы в современной технике, М.; Наука, 1980, т | |||
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
| Способ передачи радиотелеграфных сигналов | 1922 |
|
SU394A1 |
| Разрядная трубка | 1925 |
|
SU2622A1 |
