(Л
со Oi 4 4
Изобретение относится к машиностроению, в частности к захватным устройствам манипуляторов.
Цель изобретения - увеличение грузоподъемности и повышение надежности.
На фиг. 1 показан захват манипулятора в нерабочем положении, общий вид; на фиг. 2 - то же, перед подъемом изделия; на фиг. 3 - схема управления пальцами захвата.
Захват состоит из корпуса 1, на котором закреплены упругие элементы 2 и 3, имеющие меньшую упругость на концах, например, за счет переменного сечения по длине. Держатель 4 служит для соединения захвата с рукой манипулятора, центрирующий упор 5 с пружиной 6 предназначен для фиксации в захвате перемещаемого изделия 7. Упругий элемент 2 имеет на конце внутренний зацеп 8, а упругий элемент 3 - внещ- ний зацеп 9. На наружной стороне упругих элементов 2 и 3 расположены гофрированные надувные пальцы 10, являющиеся приводом упругих элементов и сообщающиеся с источником рабочего тела с помощью патрубков 11 и 12. Система управления размещена в корпусе 1, рабочее тело (воздух, жидкость) подается в пальцы через трубопровод 13. Система управления (фиг. 3) имеет обратные клапаны 14 и 15, а также дроссель 16. Обратные клапаны 14 и 15 и дроссель 16 установлены таким образом, что обеспечивается различная скорость загибания упругих элементов 3 и 2 в момент их сближения и раскрытия. Перемещаемое изделие 7 расположено на подставке 17.
Захват работает следующим образом.
После ориентации захвата относительно захватываемого изделия 7 (фиг. 1) он опускается, прижимая изделие 7 упором 5 к подставке 17. Затем в трубопровод 13 подается (под давлением) рабочее тело, которое поступает через клапан 14 (запирая клапан 15) и патрубок 11 в гофрированный палец 10 упругого элемента 2, а также через дроссель 16 и патрубок 12 в гофрированный палец 10 упругого элемента 3 (фиг. 3). При заполнении гофрированных пальцев 10 рабочим телом их гофры раздвигаются и происходит сближение упругих элементов 2 и 3 до контакта с изделием 7. При этом дроссель 16 обеспечивает более медленную подачу рабочего тела в патрубок 12 по сравнению с патрубком 11. В результате первым с изделием 7 соприкасается упругий элемент 2, прижимая к изделию зацеп 8, а затем уже на него накладывается зацеп 9 упругогб элемента 3 (фиг. 2). Далее производится подъем захвата. Под действием массы изделия 7 и усилия пружины 6 упора 5 упругие элементы 2 и 3 раздвигаются, преодолевая давление гофрированных пальцев 10, скользя
при этом замковым устройством по поверхности захватываемого изделия 7 в силу большего изгиба концов упругих элементов 2 и 3 в результате меньшей упругости их при
равном давлении, передаваемом гофрированными пальцами 10, по всей длине упругих элементов 2 и 3. В результате происходит фиксация зацепов 8 и 9 и вся нагрузка от изделия 7 воспринимается упругими элементами 2 и 3. В процессе дальнейшего перемещения захвата упор 5 фиксирует в нем изделие 7.
При установке изделия 7 на новую позицию захват опускается, сжимая пружину 6 упора 5. Под действием давления гофрированных пальцев 10 упругие элементы 2 и 3 сближаются, контактируя с изделием 7 и, разъединяя зацепы 8 и 9 (фиг. 2). После этого пальцы 10 соединяются с атмосферой и рабочее тело под действием упругости упругих элементов 2 и 3 и гофрированных
пальцев 10 вытесняется из последних.
При этом из гофрированного пальца упругого элемента 3 рабочее тело вытесняется через патрубок 12 и клапан 15, а из гофрированного пальца упругого элемента 2 - через
патрубок 11, дроссель 16 (запирая клапан 14) и клапан 15 (фиг. 3). Дроссель 16 обеспечивает более медленное истечение рабочего тела из гофрированного пальца упругого элемента 2 по сравнению с истечением рабочего тела из гофрированного пальца 10
упругого элемента 3. В результате упругий элемент 3 выпрямляется с большей скоростью, чем упругий элемент 2, что позволяет избежать фиксации зацепов 8 и 9 при раскрытии захвата.
Предложенный захват позволяет повысить грузоцодъемность, обеспечить надежную автоматическую фиксацию упругих элементов.
Формула изобретения
Захват манипулятора, содержащий корпус с закрепленными на нем надувными гофрированными пальцами и центрирующим упором, установленным между пальцами, причем полости пальцев соединены с источНИКОМ рабочего тела, отличающийся тем, что, с целью повышения надежности и грузоподъ емности, со стороны рабочей поверхности пальцев закреплены упругие элементы, одни концы которых закреплены на корпусе, а на других установлены зацепы, причем упругие
элементы выполнены с переменной жесткостью, уменьшающейся от корпуса в сторону зацепов, при этом центрирующий упор подпружинен относительно корпуса, а полости пальцев соединены между собой каналом с дросселем и подключены к источнику рабочего тела через обратные клапаны, установленные встречно-параллельно.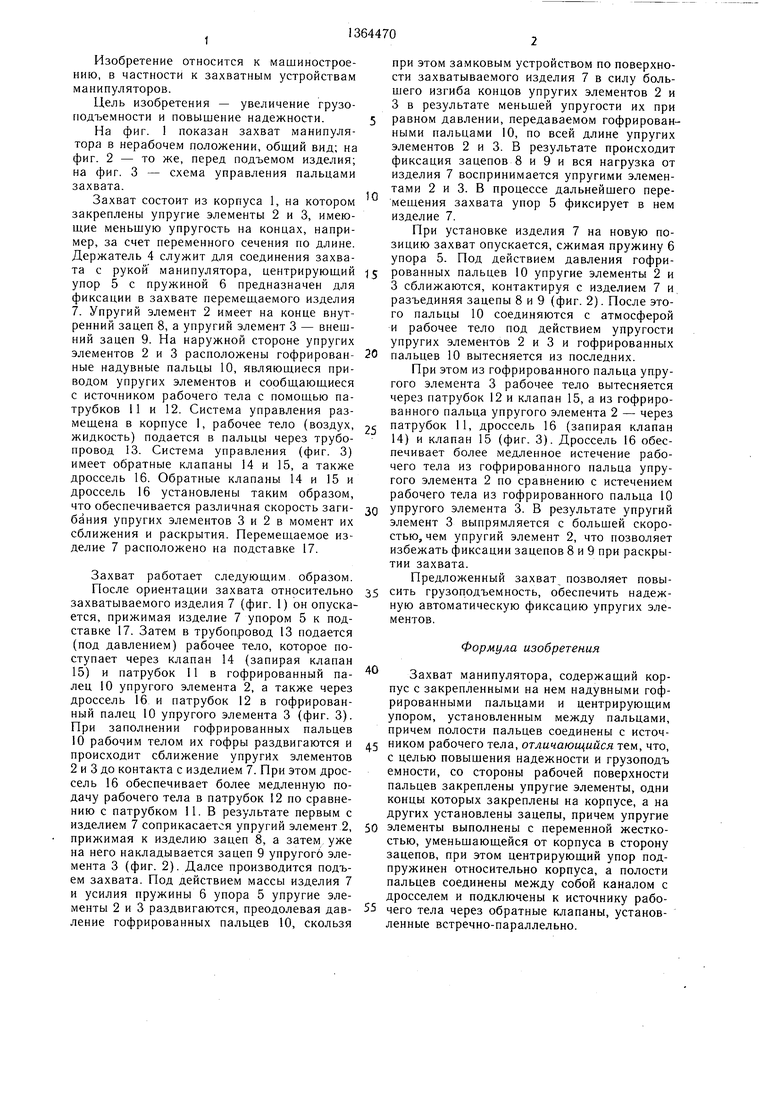
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ЗАХВАТА СФЕРИЧЕСКИХ И ЦИЛИНДРИЧЕСКИХ ИЗДЕЛИЙ | 1989 |
|
RU2028204C1 |
| Схват манипулятора | 1986 |
|
SU1404333A1 |
| Схват манипулятора | 1989 |
|
SU1689068A1 |
| Пневматический захват | 1989 |
|
SU1785893A1 |
| Исполнительный орган манипулятора | 1979 |
|
SU861060A1 |
| УСТРОЙСТВО для СБОРКИ ДЕТАЛЕЙ | 1971 |
|
SU298457A1 |
| МАШИНА ДЛЯ РАЗДЕЛКИ КРУПНОЙ РЫБЫ | 1967 |
|
SU200754A1 |
| УСТРОЙСТВО ДЛЯ РУЧНОГО ВАКУУМ-МАССАЖА | 2003 |
|
RU2240766C1 |
| АВТОМАТ АВАРИЙНОГО ОТКЛЮЧЕНИЯ ГАЗОПРОВОДА | 1998 |
|
RU2138720C1 |
| Пробка подвески обсадной колонны | 2023 |
|
RU2817478C1 |

Изобретение относится к области машиностроения, в частности к захватным устройствам манипуляторов. Цель изобретения - повышение грузоподъемности и надежности за счет обеспечения фиксации груза в захвате. На корпусе 1 закреплены упругие элементы 2 и 3 с зацепами. Приводом упругих элементов являются надувные гофрированные пальцы 10. Между пальцами 10 установлен подпружиненный центрирующий упор 5. При подаче рабочего тела в пальцы 10 они изгибают упругие элементы 2 и 3 с разной скоростью. Это обеспечивается системой управления, содержащей дроссель и два обратных клапана. Упругие элементы, имеющие переменную жесткость, охватывают изделие и при подъеме захвата под действием подпружиненного упора 5 и веса изделия 7 фиксируются зацепами. 3 ил.
7
cpuz.z
оэ
;j
/5
ф1/г.З
| Козырев Ю | |||
| Г | |||
| Промышленные роботы.: Справочник.-М.: Машиностроение, 1983, с | |||
| Универсальный двойной гаечный ключ | 1920 |
|
SU169A1 |
| Способ смешанной растительной и животной проклейки бумаги | 1922 |
|
SU49A1 |
