.I
со со со
Изобретение относится к области машиностроения, в частности к захватным устройствам манипуляторов.
Целью изобретения является повышение надежности.
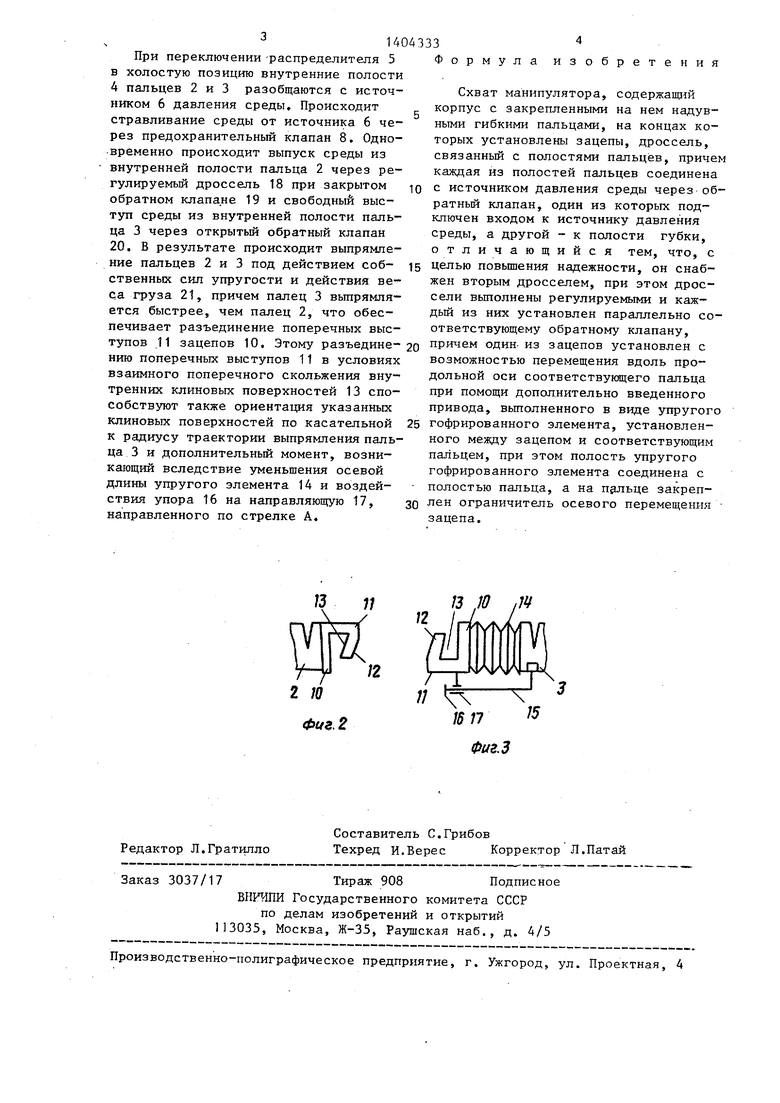
На фиг.1 показан схват манипулятора,- общий вид; на фиг.2 - то же, внутренний зацеп; на фиг.З - то же,
нием распределителя 5 давление среды от источника 6 передается во внутренние полости 4 пальцев 2 и 3. При этом во внутреннюю полость-пальца 2 давление среды передается через открытый обратный клапан 19, а во внутреннюю полость пальца 3 при закрытом обратном клапане 20 - через регулируемый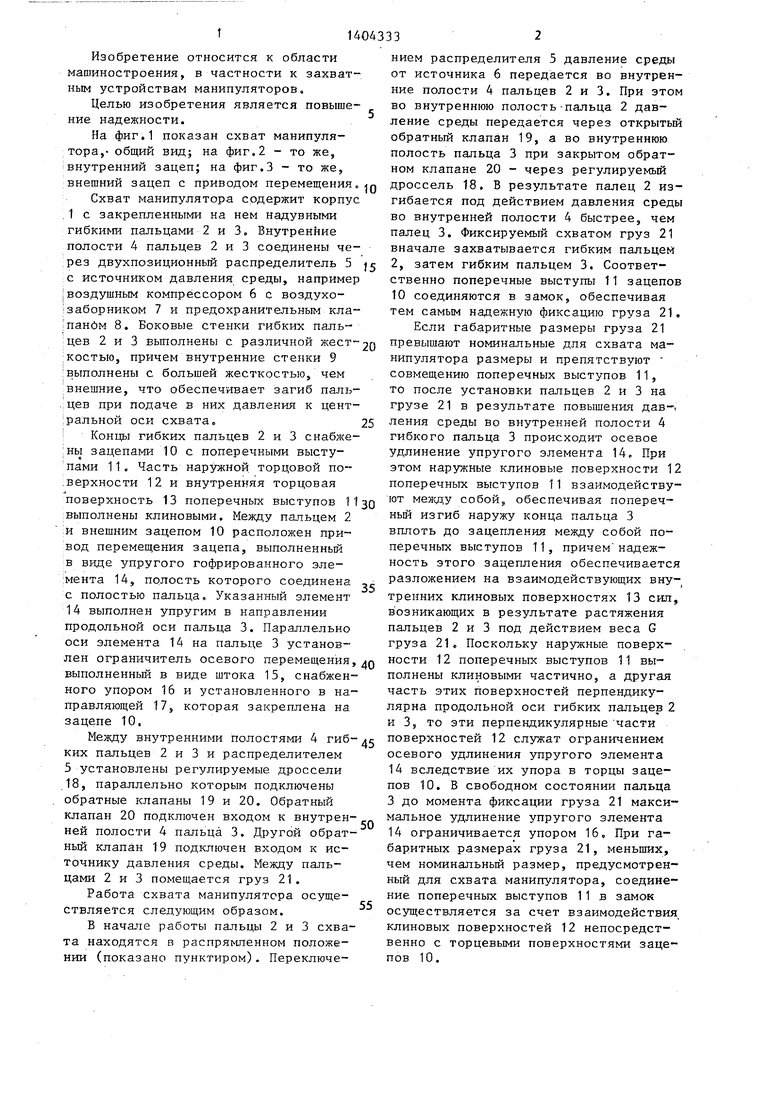
| название | год | авторы | номер документа |
|---|---|---|---|
| Захват манипулятора | 1986 |
|
SU1364470A1 |
| УСТРОЙСТВО ДЛЯ ЗАХВАТА СФЕРИЧЕСКИХ И ЦИЛИНДРИЧЕСКИХ ИЗДЕЛИЙ | 1989 |
|
RU2028204C1 |
| Устройство управления пальцами схвата манипулятора | 1986 |
|
SU1404338A1 |
| АВТОМАТ АВАРИЙНОГО ОТКЛЮЧЕНИЯ ГАЗОПРОВОДА | 1998 |
|
RU2138720C1 |
| УСТРОЙСТВО ОТБОРА ПРОБ ЖИДКОСТИ | 1998 |
|
RU2139513C1 |
| Адаптивный схват | 1986 |
|
SU1395480A1 |
| Схват манипулятора | 1989 |
|
SU1689068A1 |
| Схват манипулятора | 1985 |
|
SU1585149A1 |
| УСТРОЙСТВО ДЛЯ ПОШТУЧНОЙ ВЫДАЧИ ЗАГОТОВОК | 1990 |
|
RU2023572C1 |
| Устройство для перемещения объектов в рабочую зону | 1983 |
|
SU1122503A1 |
Изобретение относится к машиностроению, в частности к захватным устройствам манипул яторов. Целью изобретения является повышение надежности. Для этого зацеп 10 установлен с возможностью перемещения вдоль про7 дольной оси пальца 3. Параллельно обратным клапанам 19 и 20 установлены регулируемые дроссели-18. Обратный клапан 19 подключен входом к источнику давления среды. Обратный клапан 20 подключен входом к полости пальца 3. Это обеспечивает при подаче давления в полости 4 поочередный изгиб пальцев 2 и 3, а также надежную фиксацию зацепов 10 на грузе 21. Внутренняя полость упругого гофрированного элемента 14 соединена с полостью 4 пальца 3. При захвате груза 21 элемент 14 растягивается, что позволяет работать с грузами различных размеров. Упор 16 ограничивает перемещение зацепа 10 относительно пальца 3. 3 ил. т.8 ё (Л
внешний зацеп с приводом перемещения Q дроссель 18, В результате палец 2 изгибается под действием давления среды во внутренней полости 4 быстрее, чем палец 3. Фиксируемый схватом груз 21 вначале захватывается гибким пальцем
Схват манипулятора содержит корпус ,1 с закрепленными на нем надувными гибкими пальцами 2 и 3, Внутренние полости 4 пальцев 2 и 3 соединены череэ двухпозиционный распределитель 5 j 2, затем гибким пальцем 3. Соответс источником давления среды, например воздушным компрессором 6 с воздухо- :заборником 7 и предохранительным кла- панйм 8. Боковые стенки гибких паль;цев 2 и 3 выполнены с различной превышают номинальные для схвата ма: костью, причем внутренние стенки У выполнены с большей жесткостью, чем ;внешние, что обеспечивает загиб паль- цев при подаче в них давления к цент- :ральной оси схвата.
Концы гибких пальцев 2 и 3 снабже- :ны зацепами 10 с поперечными высту- пами 11, Часть нарзшной торцовой по- верхности 12 и внутренняя торцовая
поверхность 13 поперечных выступов 11 зо мелсду собой, обеспечивая поперечный изгиб наружу конца пальца 3 вплоть до зацепления между собой поперечных выступов 11, причем надежность этого зацепления обеспечивается разложением на взаимодействующих внутренних клиновых поверхностях 13 сил возникающих в результате растяжения пальцев 2 и 3 под действием веса G груза 21, Поскольку наружные поверхвыполнены клиновыми. Между пальцем 2 к внешним зацепом 10 расположен привод перемещения зацепа, выполненньй в виде упругого гофрированного эле- :мента 14, полость которого соединена с полостью пальца. Указанный элемент 14 выполнен упругим в направлении продольной оси пальца 3. Параллельно оси элемента 14 на пальце 3 установлен ограничитель осевого перемещения,дпности 12 поперечных выступов 11 вы
выполненный в виде штока 15, снабжен-полнены клиновыми частично, а другая
ного упором 16 и установленного в на-часть этих поверхностей перпендикуправляющей 17, которая закреплена налярна продольной оси гибких пальцев 2
зацепе 10.и 3, то эти перпендикулярные части
Между внутренними полостями 4 гиб- 5поверхностей 12 служат ограничением
ких пальцев 2 и 3 и распределителем 5 установлены регулируемые дроссели 18, параллельно которым подключены обратные клапаны 19 и 20. Обратный клапан 20 подключен входом к внутренней полости 4 пальца 3. Другой обратный клапан 19 подключен входом к источнику давления среды. Между пальцами 2 и 3 помещается груз 21 .
Работа схвата манипулятора осзтце- ствляется следующим образом.
В начале работы пальцы 2 и 3 схвата находятся в распрямленном положении (показано пунктиром). Переключе50
55
осевого удлинения упругого элемента 14 вследствие их упора в торцы зацепов 10. В свободном состоянии пальца 3 до момента фиксации груза 21 макси™ мальное удлинение упругого элемента 14 ограничивается упором 16. При габаритных размерах груза 21, меньших, чем номинальный размер, предусмотренный для схвата манипулятора, соединение поперечных выступов 11 в замок осуществляется за счет взаимодействия клиновых поверхностей 12 непосредственно с торцевыми поверхностями зацепов 10.
ственно поперечные выступы 11 зацепов 10 соединяются в замок, обеспечивая тем самым надежную фиксацию груза 21, Если габаритные размеры груза 21
нипулятора размеры и препятствуют совмещению поперечных выступов 11, то после установки пальцев 2 и 3 на грузе 21 в результате повышения дав-, ления среды во внутренней полости 4 гибкого пальца 3 происходит осевое удлинение упругого элемента 14. При этом наружные клиновые поверхности 12 поперечных выступов 11 взаимодейству мелсду собой, обеспечивая попереч
ный изгиб наружу конца пальца 3 вплоть до зацепления между собой поперечных выступов 11, причем надежность этого зацепления обеспечивается разложением на взаимодействующих вну тренних клиновых поверхностях 13 сил, возникающих в результате растяжения пальцев 2 и 3 под действием веса G груза 21, Поскольку наружные поверх0
5
осевого удлинения упругого элемента 14 вследствие их упора в торцы зацепов 10. В свободном состоянии пальца 3 до момента фиксации груза 21 макси™ мальное удлинение упругого элемента 14 ограничивается упором 16. При габаритных размерах груза 21, меньших, чем номинальный размер, предусмотренный для схвата манипулятора, соединение поперечных выступов 11 в замок осуществляется за счет взаимодействия клиновых поверхностей 12 непосредственно с торцевыми поверхностями зацепов 10.
При переключении -распределителя 5 в холостую позицию внутренние полости 4 папьцев 2 и 3 разобщаются с источником 6 давления среды. Происходит стравливание среды от источника 6 через предохранительный клапан 8. Одновременно происходит выпуск среды из внутренней полости пальца 2 через регулируемый дроссель 18 при закрытом обратном клапане 19 и свободный выступ среды из внутренней полости пальца 3 через открытый обратный клапан 20. В результате происходит выпрямление пальцев 2 и 3 под действием собственных сил упругости и действия веса груза 21, причем палец 3 вьшрямля- ется быстрее, чем палец 2, что обеспечивает разъединение поперечных выс10
Формула изобретения
Схват манипулятора, содержащий корпус с закрепленными на нем надув- ньтми гибкими пальцами, на концах которых установлены зацепы, дроссель, связанный с полостями пальцев, причем каждая из полостей пальцев соединена с источником давления среды через обратный клапан, один из которых подключен входом к источнику давления среды, а другой - к полости губки, отличающийся тем, что, с
15 целью повышения надежности, он снабжен вторым дросселем, при этом дроссели вьшолнены регулируемыми и каждый из них установлен параллельно соответствующему обратному клапану, тупов .11 зацепов 10. Этому разъедине-20 ричем один-из зацепов установлен с ниш поперечных выступов 11 в условиях возможностью перемещения вдоль про- взаимного поперечного скольжения вну- дольной оси соответствукяцего пальца тренних клиновых поверхностей 13 спо- при помощи дополнительно введенного собствуют также ориентация указанных привода, выполненного в виде упругого клиновых поверхностей по касательной 25 гофрированного элемента, установлен- к радиусу траектории выпрямления паль- ного между зацепом и соответствующим ца 3 и дополнительный момент, вознипальцем, при этом полость упругого гофрированного элемента соединена с полостью пальца, а на пэльце закреп- 30 лен ограничитель осевого перемещения зацепа.
кающий вследствие уменьшения осевой длины упругого элемента 14 и воздействия упора 16 на направляющую 17, направленного по стрелке А.
13 11 13 10 ,14
./ /2 / /
Формула изобретения
Схват манипулятора, содержащий корпус с закрепленными на нем надув- ньтми гибкими пальцами, на концах которых установлены зацепы, дроссель, связанный с полостями пальцев, причем каждая из полостей пальцев соединена с источником давления среды через обратный клапан, один из которых подключен входом к источнику давления среды, а другой - к полости губки, отличающийся тем, что, с
целью повышения надежности, он снабжен вторым дросселем, при этом дроссели вьшолнены регулируемыми и каждый из них установлен параллельно соответствующему обратному клапану, ричем один-из зацепов установлен с возможностью перемещения вдоль про- дольной оси соответствукяцего пальца при помощи дополнительно введенного привода, выполненного в виде упругого гофрированного элемента, установлен- ного между зацепом и соответствующим
пальцем, при этом полость упругого гофрированного элемента соединена с полостью пальца, а на пэльце закреп- лен ограничитель осевого перемещения зацепа.
| Захват манипулятора | 1986 |
|
SU1364470A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
