Изобретение относится к машиностроению, а именно к захватным устройствам манипуляторов. В частности, оно может быть применено при манипулировании в радиационных камерах при работе с капсулами, содержащими источники ионизирующего излучения.
Известны устройства для захвата и перемещения изделий, содержащие корпус, привод и захватные губки, связанные между собой и с приводом.
Недостатками известных устройств являются, во-первых, малая надежность захвата сферических и близких к ним по форме изделий, а во-вторых, необходимость затраты времени на точное подведение устройства к изделию в позицию захвата, что в экстремальных условиях, например при значительном тепловом или радиационном излучениях, недопустимо. В третьих, фиксация зажимными губками в сочетании с приводом их перемещения может привести к нарушению формы и целостности оболочки изделия.
Известно устройство с игольчатыми захватами для захвата волокнистых грузов, в котором механизмом смыкания служит эластичная оболочка.
Недостатками этого устройства является, во-первых, сложность конструкции, так как устройство предполагает наличие какого-либо привода с действием его в момент захвата, а, во-вторых, малая надежность захвата сферических и близких к ним по форме изделий, так как удержание изделия происходит за счет силы трения между изделием и игольчатыми захватами. При этом захват изделий, обладающих существенным весом, при помощи известного устройства практически невозможен.
Устройством, наиболее близким по назначению и конструкции к заявляемому техническому решению, является захват манипулятора, содержащий корпус с закрепленными на нем надувными гофрированными пальцами и центрирующим упором, установленным между пальцами, причем полости пальцев соединены с источником рабочего тела, а со стороны рабочей поверхности пальцев закреплены упругие элементы, одни концы которых закреплены на корпусе, а на других установлены зацепы, причем упругие элементы выполнены с переменной жесткостью, уменьшающейся от корпуса в сторону зацепов, при этом центрирующий упор подпружинен относительно корпуса, а полости пальцев соединены между собой каналом с дросселем и подключены к источнику рабочего тела через обратные клапаны, установленные встречно-параллельно.
К недостаткам известного устройства-прототипа относятся необходимость затраты времени на поиск позиции захвата изделия, особенно в условиях ограниченной видимости, возможность разрушения изделия при выпадении из-за нарушения в системе воздухоподачи, малая надежность захвата сферических, цилиндрических и близких к ним по форме изделий, а также сложность конструкции.
Целью изобретения является упрощение конструкции, а также повышение скорости и надежности захвата, одновременного по площади, в условиях ограниченной видимости за счет воздействия изделия на элементы захвата.
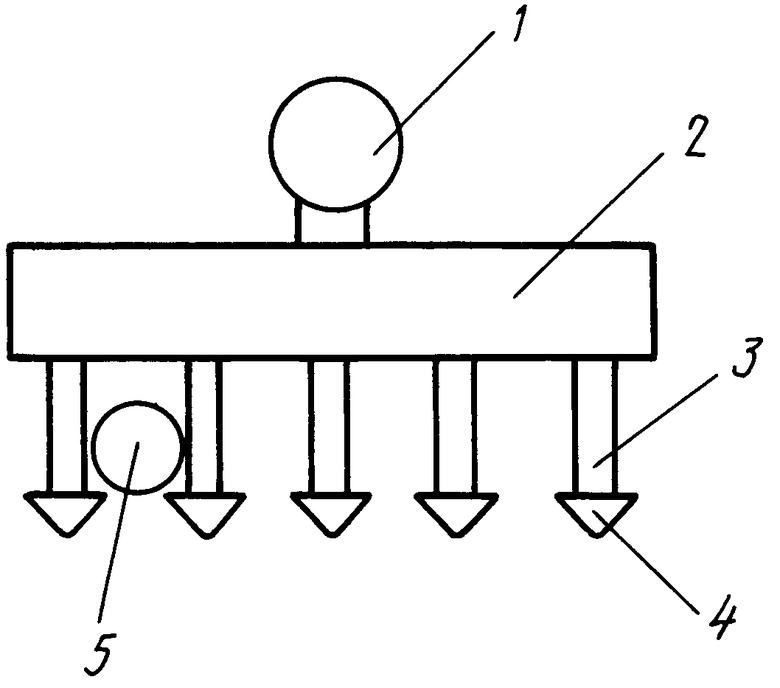
На чертеже показано предлагаемое устройство.
Устройство содержит смонтированный на держателе 1 корпус 2, выполненный из гибкого материала с возможностью изгиба, и элементы захвата, выполненные в виде стержней 3, на торцах которых смонтированы концевики 4.
Работа устройства осуществляется следующим образом.
Устройство, смонтированное на держателе 1, при посредстве держателя 1 подводят к захватываемому изделию 5. При этом смонтированные на корпусе 2 элементы захвата, выполненные в виде стержней 3 с концевиками 4, направляют концевиками 4 к изделию. В условиях прямой видимости корпус 2 располагают над лежащим изделием, предназначенным для захвата. В условиях видимости, ограниченной слабым освещением, недостаточной прозрачностью воздуха, элементами внешних конструкций и т.п., корпус 2 располагается над местом предполагаемого нахождения изделия. Затем держателем 1 корпус 2 опускают на изделие или в предполагаемую точку нахождения его до упора концевиков 4 в поверхность, на которой находится изделие. В это время благодаря возможности изгиба корпуса 2 стержни 3 в момент прохождения изделия через концевики 4 расходятся и отклоняются под углом к плоскости поверхности корпуса 2 и пропускают изделие вверх за концевики 4. После прохождения изделия через концевики 4 стержни 3 занимают прежнее положение, перпендикулярное плоскости корпуса 2. Зафиксированное в захвате изделие может быть перенесено посредством держателя 1 в нужное место.
Таким образом, благодаря большой площади захвата захват изделия производится быстро и надежно даже в условиях плохой видимости.
При необходимости, для выброса изделия достаточно изогнуть корпус 2.
| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор для герметизированного пространства | 1988 |
|
SU1618651A1 |
| Схват манипулятора | 1986 |
|
SU1404333A1 |
| Захват манипулятора | 1986 |
|
SU1364470A1 |
| Захватное устройство | 1987 |
|
SU1498610A1 |
| Устройство для захвата мягких деталей | 1989 |
|
SU1742189A1 |
| Ударный механизм | 1986 |
|
SU1481051A1 |
| Захватное устройство | 1985 |
|
SU1296405A1 |
| АВТОМАТИЗИРОВАННАЯ СИСТЕМА А.А.СМИРНОВА ХРАНЕНИЯ, ПОИСКА И ВЫДАЧИ НОСИТЕЛЕЙ ИНФОРМАЦИИ ПРЕИМУЩЕСТВЕННО ДЛЯ РАБОЧЕГО МЕСТА ПРОИЗВОДСТВЕННОГО МАСТЕРА | 1988 |
|
RU2069627C1 |
| Захватное устройство | 1983 |
|
SU1217656A1 |
| Манипулирующее устройство | 1978 |
|
SU789190A1 |
Изобретение относится к захватным устройствам манипуляторов и позволяет осуществить быстрый и надежный захват сферических, цилиндрических и подобных им по форме изделий. Устройство содержит корпус из гибкого материала, узел изгиба и укрепленные рядами в корпусе элементы захвата со стреловидными концевиками. При нажиме на захватываемое изделие элементы захвата за счет изгиба корпуса в местах закрепления элементов захвата расходятся и пропускают изделие за концевики, после чего благодаря упругости корпуса занимают прежнее положение, надежно удерживая изделие. В нужный момент изделие удаляется из захвата при помощи узла изгиба. 1 з.п. ф-лы, 1 ил.
| Захват манипулятора | 1986 |
|
SU1364470A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
