Изобретение относится к области машиностроения, в частности к захватным устройствам манипуляторов промышленных роботов и может найти применение при автоматизации сборочных и погрузочно-на- грузочных процессов, например при переносе изделий из зоны прессования к разгрузке до их термической обработки.
Известен пневматический захват, содержащий корпус в виде тела вращения с каналами подвода сжатого воздуха, надувную эластичную камеру в виде стакана, закрепленного на боковой поверхности корпуса и в центральной части рабочего торца корпуса 1.
Основным недостатком данного захвата является то, что он не пригоден для работы с легко разрушаемыми изделиями из-за колебания рабочего давления в сети подачи воздуха, следовательно и в полости надувной эластичной камеры. В момент фиксации изделия на камере, в случае внезапного увеличения давления воздуха в ней, неизбежно
стенка камеры разрушит изделие, в случае понижения давления - изделие соскользнет со стенки камеры. Поэтому точное поддержание рабочего давления воздуха в полости надувной эластичной камеры, необходимо при работе с легко разрушаемыми изделиями, например, с режущими пластинами до их термической обработки. В то же время, задавая электродом пьезометра высоту водяного столба в трубке, можно в каждом конкретном случае задавать рабочее давление в полости надувной эластичной камеры, рассчитанное на различные диаметры внутренних отверстий переносимых изделий.
Целью изобретения является повышение качества работы захвата и расширение технологических возможностей.
Цель достигается тем, что надувная эластичная камера соединена с пьезометрической трубкой, внутрь которой вставлен электрод, соединенный через электронное реле с электрическим клапаном подачи воздуха.
VJ 00 (Л 00
ю w
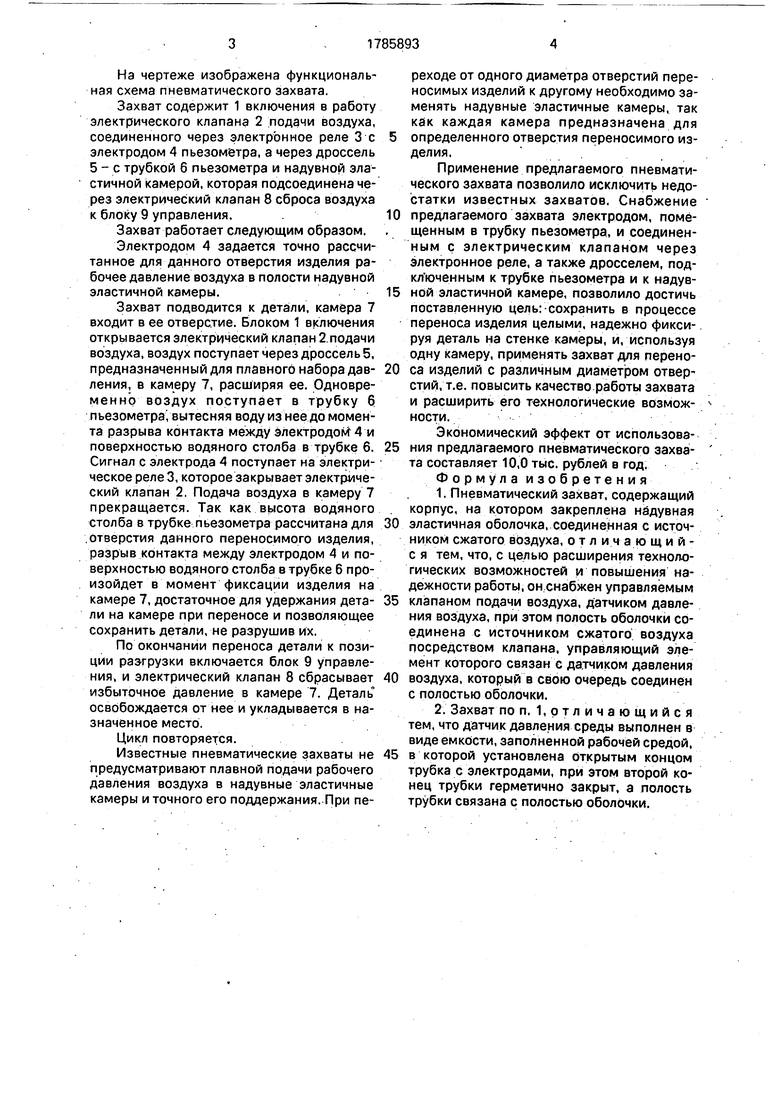
На чертеже изображена функциональная схема пневматического захвата.
Захват содержит 1 включений в работу электрического клапана 2 подачи воздуха, соединенного через электронное реле Зс электродом 4 пьезометра, а через дроссель 5 - с трубкой 6 пьезометра и надувной эластичной камерой, которая подсоединена через электрический клапан 8 сброса воздуха к блоку 9 управления.
Захват работает следующим образом.
Электродом 4 задается точно рассчитанное для данного отверстия изделия рабочее давление воздуха в полости надувной эластичной камеры.
Захват подводится к детали, камера 7 входит в ее отверстие. Блоком 1 включения открывается электрический клапан 2.подачи воздуха, воздух поступает через дроссель 5, предназначенный для плавного набора давления, в камеру 7, расширяя ее. Одновременно воздух поступает в трубку 6 пьезометра;вытесняя воду из нее до момента разрыва контакта между электродом4 4 и поверхностью водяного столба в трубке 6. Сигнал с электрода 4 поступает на электрическое реле 3, которое закрывает электрический клапан 2. Подача воздуха в камеру 7 прекращается. Так как высота водяного столба в трубке пьезометра рассчитана для .отверстия данного переносимого изделия, разрыв контакта между электродом 4 и поверхностью водяного столба в трубке 6 произойдет в момент фиксации изделия на камере 7, достаточное для удержания детали на камере при переносе и позволяющее сохранить детали, не разрушив их.
По окончании переноса детали к позиции разгрузки включается блок 9 управления, и электрический клапан 8 сбрасывает избыточное давление в камере 7. Деталь освобождается от нее и укладывается в назначенное место.
Цикл повторяется.
Известные пневматические захваты не предусматривают плавной подачи рабочего давления воздуха в надувные эластичные камеры и точного его поддержания. При переходе от одного диаметра отверстий переносимых изделий к другому необходимо заменять надувные эластичные камеры, так как каждая камера предназначена для
определенного отверстия переносимого изделия.. .
Применение предлагаемого пневматического захвата позволило исключить недостатки известных захватов. Снабжение
предлагаемого захвата электродом, помещенным в трубку пьезометра, и соединенным с электрическим клапаном через электронное реле, а также дросселем, под- кл юченным к трубке пьезометра и к надувной эластичной камере, позволило достичь поставленную цель:-сохранить в процессе переноса изделия целыми, надежно фикси-. руя деталь на стенке камеры, и/используя одну камеру, применять захват для переноса изделий с различным диаметром отверстий, т.е. повысить качество работы захвата и расширить его технологические возможности.
Экономический эффект от использования предлагаемого пневматического захвата составляет 10,0 тыс. рублей в год. Формула изобретения
1. Пневматический захват, содержащий корпус, на котором закреплена надувная
эластичная оболочка, соединенная с источником сжатого воздуха, отличающий- с я тем, что, с целью расширения технологических возможностей и повышения надежности работы, он снабжен управляемым
клапаном подачи воздуха, датчиком давления воздуха, при этом полость оболочки соединена с источником сжатого воздуха посредством клапана, управляющий элемент которого связан с датчиком давления
воздуха, который в свою очередь соединен с полостью оболочки.
2. Захват по п. 1, о т л и ч а ю щ и и с я тем, что датчик давления среды выполнен в виде емкости, заполненной рабочей средой, в которой установлена открытым концом трубка с электродами, при этом второй конец трубки герметично закрыт, а полость трубки связана с полостью оболочки.
«tfl/
| название | год | авторы | номер документа |
|---|---|---|---|
| ЗАХВАТ ПРОМЫШЛЕННОГО РОБОТА | 1998 |
|
RU2141396C1 |
| ЗАХВАТ ПРОМЫШЛЕННОГО РОБОТА | 2002 |
|
RU2228258C2 |
| Захват промышленного робота | 1987 |
|
SU1465308A1 |
| Схват манипулятора | 1989 |
|
SU1689068A1 |
| ЛЕНТОЧНОШЛИФОВАЛЬНЫЙ СТАНОК ДЛЯ ОБРАБОТКИ НАРУЖНОЙ ПОВЕРХНОСТИ ДЛИННОМЕРНЫХ ИЗДЕЛИИ | 1973 |
|
SU395239A1 |
| Групповой пневматический захват | 1979 |
|
SU804450A1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ПОРИСТОСТИ И ПРОНИЦАЕМОСТИ ОБРАЗЦОВ ГОРНЫХ ПОРОД | 2007 |
|
RU2342646C2 |
| Устройство для гальванического покрытия деталей | 1982 |
|
SU1070220A1 |
| Устройство для съема и транспортировки свежеотформованных изделий | 1987 |
|
SU1447679A1 |
| СИГНАЛИЗАТОР ДАВЛЕНИЯ | 1999 |
|
RU2156967C1 |

Использование: в захватных устройствах манипуляторов при автоматизации сбо- рочных и погрузочно-разгрузочных процессов, например при переносе изделий из зоны прессования к разгрузке до их термической обработки. Сущность изобретения: захват содержит блок включения в работу электрического клапана подачи воздуха, соединенного через электронное реле с электродом пьезометра, а- через дроссель - с трубкой пьезометра и надувной эластичной камерой, которая подсоединена через электрический клапан сброса воздуха к блоку управления. 1 з.п.ф-лы. 1 ил.
Л
со
to
Жо
/EH
OD
| Козырев Ю.Г | |||
| Промышленные роботы | |||
| Справочник | |||
| - М.: Машиностроение, 1983, с | |||
| Приспособление, заменяющее сигнальную веревку | 1921 |
|
SU168A1 |
