Фиг f
Изобретение относится к машино- и приборостроению и может быть использовано для вибрационной обработки гранулированной средой.
Цель изобретения - повышение надежности устройства за счет исключения угловых колебательных движений вертикального вала.
25
На фиг. 1 изображена схема устрой- JQ наружные кольца подшипников будут совершать качательные движения в вертикальной плоскости. Величину угла Q определяют расчетным путем. Если, например, необходимо задать вертикаль- If ную составляющую колебаний контейнера А, равную 5 мм, и при этом радиус средней окружности равен 500 мм (см.
I д
фиг. 1), то по формуле tg - находим,
д
20 что -g 0,01, а угол Q 0°35. к
Благодаря предлаг аемому расположению наружной и внутренней поверхностей втулки относительно оси вращения вала 4, т.е. за счет того, что линия эксцентриситета ОХ (см. фиг. 4) образует с осью симметрии 0,| прямой угол, а ось симметрии 0, в свою очередь образует угол Q с вертикалью, траектория колебаний контейнера представляет собой пространственную замкнутую линию кольцевого типа.
Когда точка I (см. фиг. 4) плоскости сечения втулки при вращении попадает на прямую, соединяющую i точ- 35 ку контейнера с осью вращения, то эта i точка на траектории колебаний занимает самое близкое к оси вращения положение - крайнее левое. Это положение на траектории отмечено цифрой l . Когда точка II плоскости сечения втулки попадает на прямую, соединяющую ту же i точку контейнера с осью вращения OZ, то она занимает самое низкое положение на траектории колебаний - цифра И . Когда точка III плоскости сечения втулки попадает на ту же прямую, то i точка контейнера занимает самое отдаленное
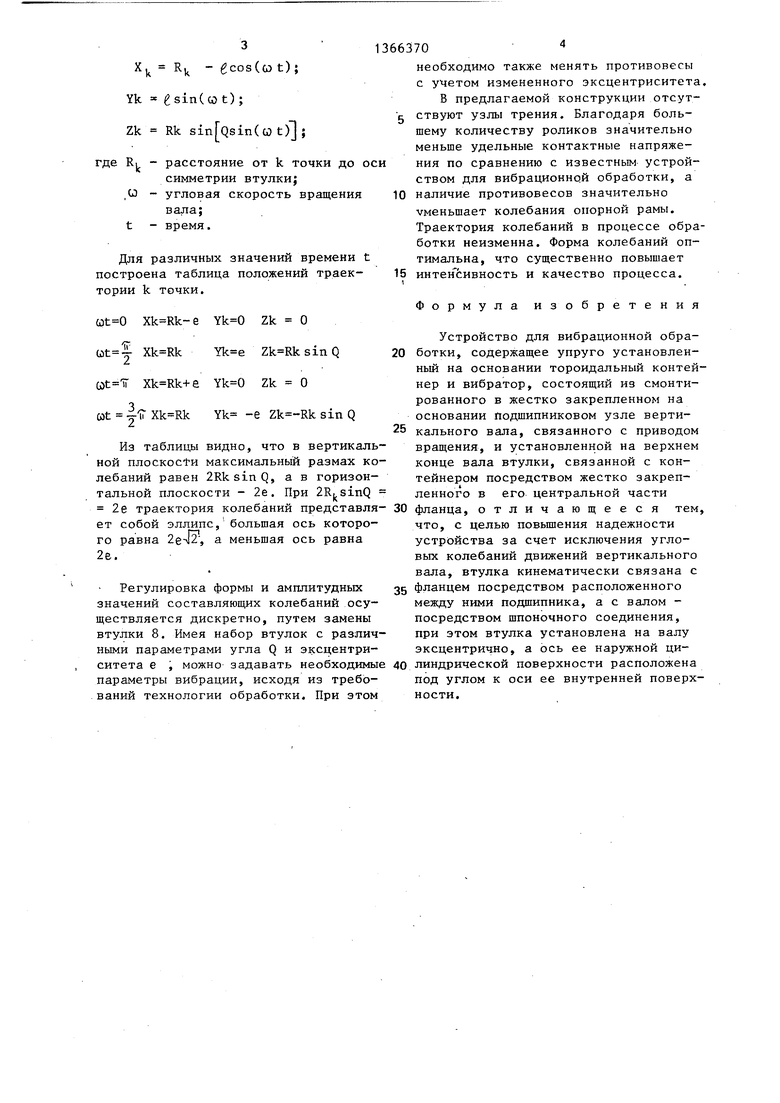
ства, продольный разрез; на фиг. 2 - узел I на фиг.1; на фиг. 3 - сечение вала и расположение противовесов относительно эксцентриситета, вид сверху; на фиг. 4 .- траектория колебания произвольной точки контейнера и расположение нормального поперечного сечения цилиндра относительно оси вращения, в изометрии.
На основании 1 установлен тороидальный контейнер 2. Его положение в пространстве фиксируется с помощью пружин 3 и вертикального вала 4,установленного в упорных подшипниках 5. Вал связан через клиноременную передачу 6 с электродвигателем 7. В верхней консольной части вала установлена втулка 8, которая через шпонку 9 воспринимает крутящий момент от вала 4. На наружную поверхность втулки напрессованы два радиально-упорных под- шипн ика 10. Гайка 11 прижимает подшипники один к другому. Наружные кольца радиально-упорных подшипников посредством двух фланцев 12 присоединены к контейнеру. На вертикальном валу установлены также два противовеса 13. Нижний противовес прижат к валу в тул- ков 8, а верхний противовес - гайкой 14.
Устройство для вибраг онной обработки работает следующим образом.
При включении электродвигателя 7 , через клиноременную передачу 6 передается крутящий момент на вал 4 и через щпонку 9 - на втулку 8. Внутренние кольца радиально-упорных подшипников напрессованы на втулку и по- зтому вращаются одновременно с ней. Наружные кольца подшипников 10, а заодно с ними фланцы 12 и контейнер 2 не воспринимают вращение со стороны внутренних колец, а только перемещения в радиальном и вертикальном направлениях. В горизонтальной плоскости наружные кольца и контейнер будут совершать гирационное движение, т.е. все точки контейнера будут двигаться поступательно по круговой траектории.
30
40
45
50
55
от оси
вращения положение - цифра, III . Точке IV i соответствует самое высокое положение i точки контейнера - VI .
Уравнение движения произвольной k точки контейнера в декартовых координатах можно записать в следующем виде Для удобства записи точку расположим на оси ОХ неподвижной системы координат XOYZ (см. фиг. 4)
радиус которой равен величине эксцентриситета е внутренней поверхности втулки относительно оси вращения вала 4. Пружины 3 ограничивают поворот контейнера вокруг своей оси.
Так как ось наружной поверхности втулки наклонена относительно оси ее внутренней поверхности на угол Q, то
Когда точка I (см. фиг. 4) плоскости сечения втулки при вращении попадает на прямую, соединяющую i точ- 5 ку контейнера с осью вращения, то эта i точка на траектории колебаний занимает самое близкое к оси вращения положение - крайнее левое. Это положение на траектории отмечено цифрой l . Когда точка II плоскости сечения втулки попадает на прямую, соединяющую ту же i точку контейнера с осью вращения OZ, то она занимает самое низкое положение на траектории колебаний - цифра И . Когда точка III плоскости сечения втулки попадает на ту же прямую, то i точка контейнера занимает самое отдаленное
0
от оси
вращения положение - цифра, III . Точке IV i соответствует самое высокое положение i точки контейнера - VI .
55
Уравнение движения произвольной k точки контейнера в декартовых координатах можно записать в следующем виде. Для удобства записи точку расположим на оси ОХ неподвижной системы координат XOYZ (см. фиг. 4)
Х, R - gcosCo t); Yk gsinCco t) ; Zk Rk sinfQsinCw t) ;
де Rj - расстояние от k точки до оси симметрии втулки;
СО t угловая скорость вращения
вала;
время.
Для различных значений времени t построена таблица положений траектории k точки.
Zk О
Zk RksinQ
Zk 0
Mt I u
Yk -e sin Q
Из таблицы видно, что в вертикальной плоскости максимальный размах колебаний равен 2RksinQ, а в горизонтальной плоскости - 2е. При
Устройство для вибрационной обработки, содержащее упруго установленный на основании тороидальный контейнер и вибратор, состоящий из смонтированного в жестко закрепленном на основании Подшипниковом узле вертикального вала, связанного с приводом вращения, и установленной на верхнем конце вала втулки, связанной с контейнером посредством жестко закрепленного в его центральной части
2е траектория колебаний представля- 30 фланца, отличающееся тем.
ет собой эллипс, большая ось которого равна 2е4, а меньшая ось равна 2е.
устройства за счет исключения угловых колебаний движений вертикального вала, втулка кинематически связана с
366370
необходимо также менять противовесы с учетом измененного эксцентриситета, В предлагаемой конструкции отсут- g ствуют узлы трения. Благодаря большему количеству роликов значительно меньше удельные контактные напряжения по сравнению с известным устройством для вибрационной обработки, а 10 наличие противовесов значительно уменьшает колебания опорной рамы. Траектория колебаний в процессе обработки неизменна. Форма колебаний оптимальна, что существенно повышает интенсивность и качество процесса.
15
Формула изобретения
Устройство для вибрационной обработки, содержащее упруго установленный на основании тороидальный контейнер и вибратор, состоящий из смонтированного в жестко закрепленном на основании Подшипниковом узле вертикального вала, связанного с приводом вращения, и установленной на верхнем конце вала втулки, связанной с контейнером посредством жестко закрепленного в его центральной части
устройства за счет исключения угловых колебаний движений вертикального вала, втулка кинематически связана с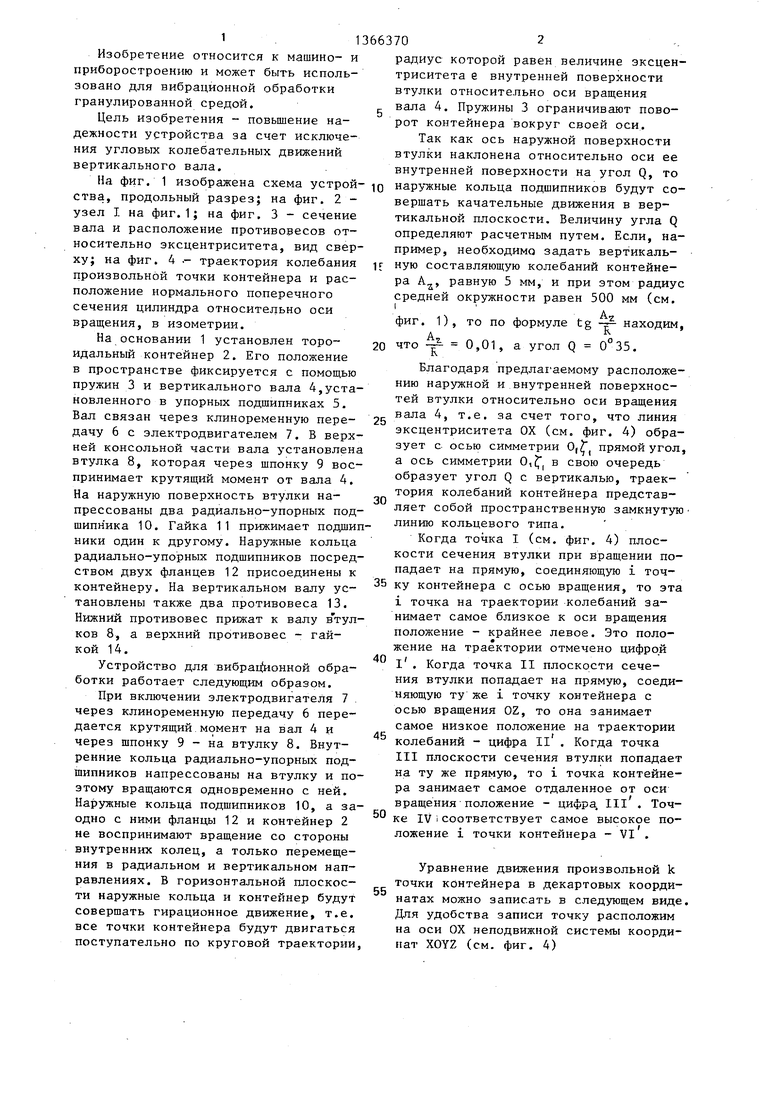
| название | год | авторы | номер документа |
|---|---|---|---|
| Установка для вибрационной обработки деталей | 1990 |
|
SU1781001A1 |
| Вибрационный станок | 1987 |
|
SU1458181A1 |
| ВИБРАЦИОННАЯ КОНУСНАЯ ДРОБИЛКА | 1992 |
|
RU2018356C1 |
| ЦЕНТРОБЕЖНО-ВИБРАЦИОННЫЙ СПОСОБ РАЗДЕЛЕНИЯ СМЕСЕЙ | 1993 |
|
RU2031727C1 |
| ВИБРАЦИОННАЯ КОНУСНАЯ ДРОБИЛКА | 1992 |
|
RU2040966C1 |
| Устройство для вибрационной обработки | 1979 |
|
SU903089A1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ОТДЕЛОЧНО-УПРОЧНЯЮЩЕЙ ОБРАБОТКИ РАБОЧИХ ПОВЕРХНОСТЕЙ ВОЛНОВОДОВ | 2022 |
|
RU2793899C1 |
| СПОСОБ ШЕЛУШЕНИЯ ЗЕРНА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1992 |
|
RU2048204C1 |
| ВИБРАЦИОННАЯ КОНУСНАЯ ДРОБИЛКА | 1992 |
|
RU2038845C1 |
| Устройство для вибрационной обработки деталей | 1987 |
|
SU1556879A1 |

Изобретение относится к машино- и приборостроению и может быть использовано для вибрационной обработки деталей-машин h приборов гранулированной средой. Целью изобретения является повышение надежности устройства за счет исключения угловых колебательных движений вертикального вала. Тороидальный контейнер 2 упруго установлен на основании 1. -Вибратор устройства выполнен в виде связанного с приводом вращения вертикального вала 4 с установленной на его верхнем конце втулкой 8, кинематически связанной с контейнером посредством подшипников 10. Размещение втулки 8 на валу с эксцентриситетом, а также выполнение ее наружной поверхности в виде цилиндра, ось которого наклонена к оси вращения вала 4 под острым углом, позволяет сообщить контейнеру пространственные колебания при строго вертикальном положении вала 4. Этим самым снижаются нагрузки на вал и соответственно повышается-надежность устройства. 4 ил. S (Л
Регулировка формы и амплитудных значений составляющих колебаний осуществляется дискретно, путем замены втулки 8. Имея набор втулок с различными параметрами угла Q и эксцентри35 фланцем посредством расположенного между ними подшипника, а с валом - посредством шпоночного соединения, при этом втулка установлена на валу эксцентрично, а ось ее наружной ци- ситета е , можно задавать необходимые 40 линдрической поверхности расположена параметры вибрации, исходя из требо- под углом к оси ее внутренней поверх- ваний технологии обработки. При этом ности.
/J
1366370 /
8
fO
фи.2
фи&.З
;
ФигЛ
| Устройство для вибрационной обработки | 1984 |
|
SU1222510A1 |
| Пишущая машина для тюркско-арабского шрифта | 1922 |
|
SU24A1 |
