7Sff
Изобретение относится к машиностроению и может быть использовано в робототехнике и подъемно-транспортной технике.
Цель изобретения - расширение технологических возможностей и повышение грузоподъемности за счет совместной работы электромагнитного и вакуумного устройств.
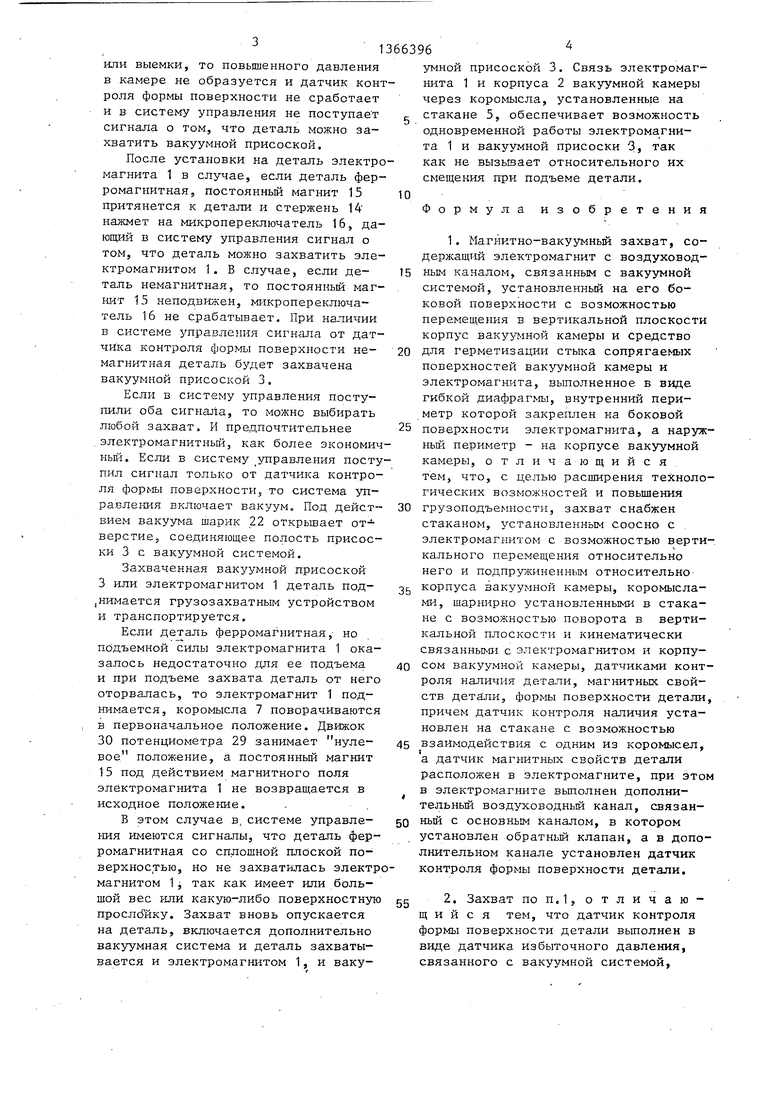
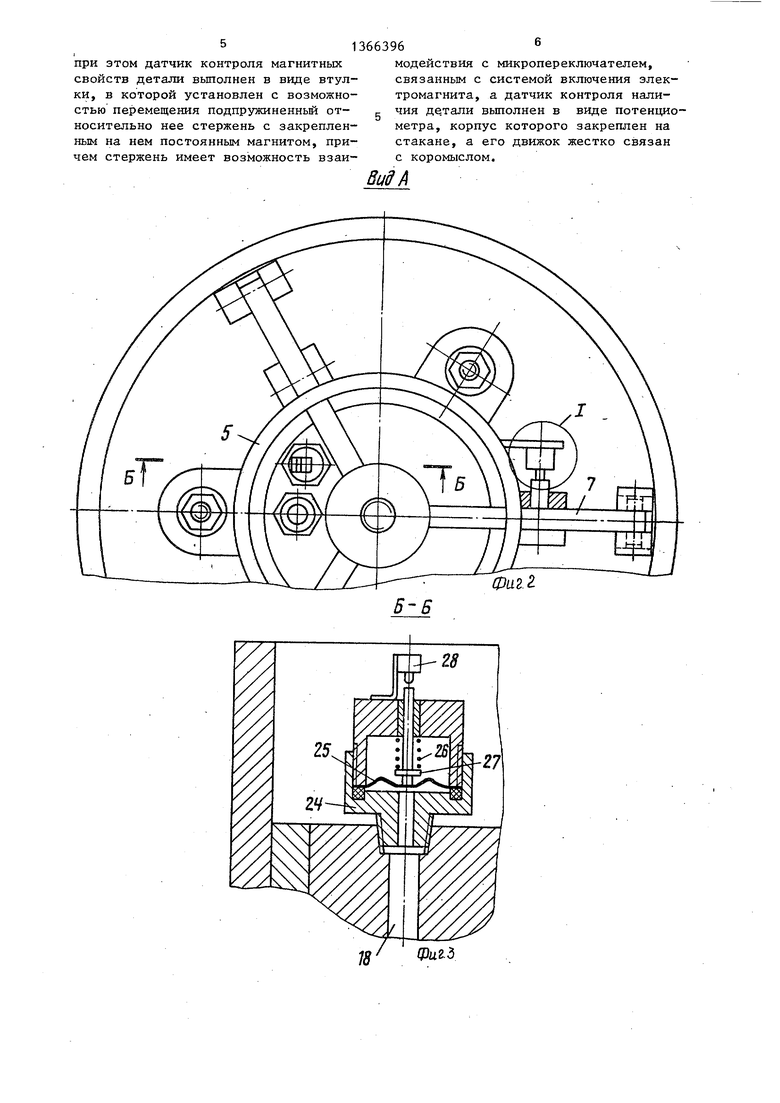
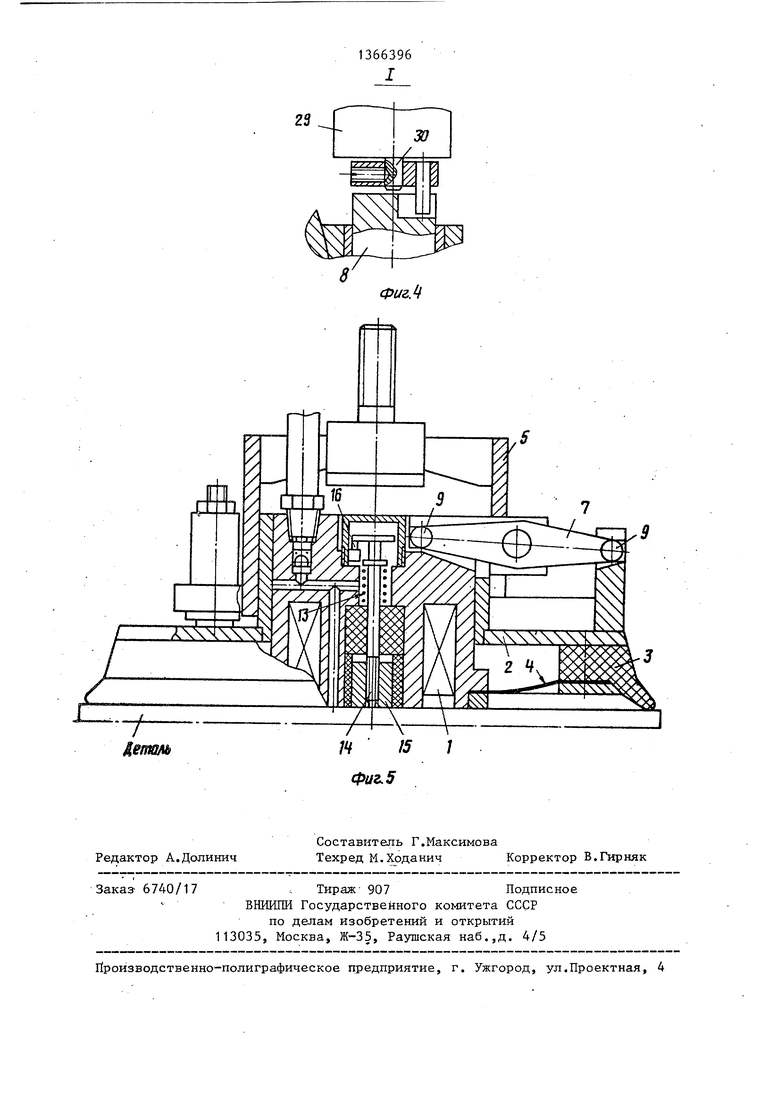
На фиг. 1 представлен захват, общий вид; на фиг. 2 - вид А на фиг.1; на фиг. 3 - разрез Б-р на фиг. 2; на фиг. 4 - узел I на фиг. 2; на фиг.. 5 - захват при опускании его на деталь, общий вид.
Магнитно-вакуумный захват содер- ядат электромагнит 1 и вакуумную ка- меру , состоящую-из корпуса 2 и закрепленной на нем резиновой присос- «ки 3 „
Корпус 2 вакуумной камеры установлен на боковой поверхности электромагнита 1 с возможностью вертикального перемещения относительно последнего.
К электромагниту 1 и присоске 3 крепится диафрагма 4, герметизирующая стык сопрягаемых поверхностей электромагнита и корпуса 2 вакуумной камеры.
На боковой поверхности электромагнита 1 установлен стакан 5 с воз- молсностью вертикального перемещения относительно последнего. Стакан 5 подпружинен пружинами 6 относительно корпуса 2 вакуумной камеры. В стакане 5 установлены коромысла 7, имеющие возможность вращения в вертикальных плоскостях на осях 8, жестко соединенных с коромыслами. .Коромысла 7 соединены кинематически с электромагнитом 1 и корпусом 2 вакуумной камеры. На концах рычагов коромысел 7 вьшолнены цилиндрические выступы 9, а в корпусах - пазы для размещения рычагов коромысел и горизонтальные пазы для размещения выступов коромысел.
5
0
лен с возможностью перемещения в ней подпружиненный пружиной 13 стержень
14 с закрепленным на нем постоянным магнитом 15, и микропереключатель
16, установленньй в электромагните
Iс возможностью взаимодействия со стержнем 14. Втулка 12 выполнена из немагнитного материала. Микропереключатель 16 соединен с системой включения электромагнита 1. Датчик
IIгерметично закрыт колпачком 17. В электромагните 1 выполнены сообщаюшрнеся между собой воздуховрд- ные каналы 18. В одном из них установлен подводящий штуцер 19 и обрат- ньы клапан, содержащий нижнее седло 20, верхнее седло 21, шарик 22 и пружину 23, установленную между шариком 22 и штуцером 19. В другом канале 18 (см.фиг,3) установлен датчик контроля формы поверхности детали, содержашз й корпус 24 с установленными в нем диафрагмой 25 и под- 5 пружиненным пружиной 26 штоком 27. На корпусе 24 установлен с возможностью взаимодействия со штоком 27 микропереключатель 28, соединенный с системой включег-шя подачи вакуума
На стакане 5 установлен датчик контроля наличия детали, выполненный в виде потенциометра 29, движок 30 взаимодействует с коромыслом 1,
Захват работает следующим образом.
Захват устанавливается на захватываемую деталь. Корпус 2 вакуумной камеры перемещается вверх и через коромысла 7, поворачивая их, перемещает стакан 5 и опускает электромагнит 1 вниз пока он не коснется детали.
Поворот коромысла 7 вызьгоает ворот движка потенциометра 29, который меняет поданное на него напряжение, давая сигнал в систему управления, что корпус 2 вакуумной камеры и электромагнит 1 лежат на детали.
При опускании электромагнита 1 объем вакуумной камеры уменьшается и.
I
0
5
0
5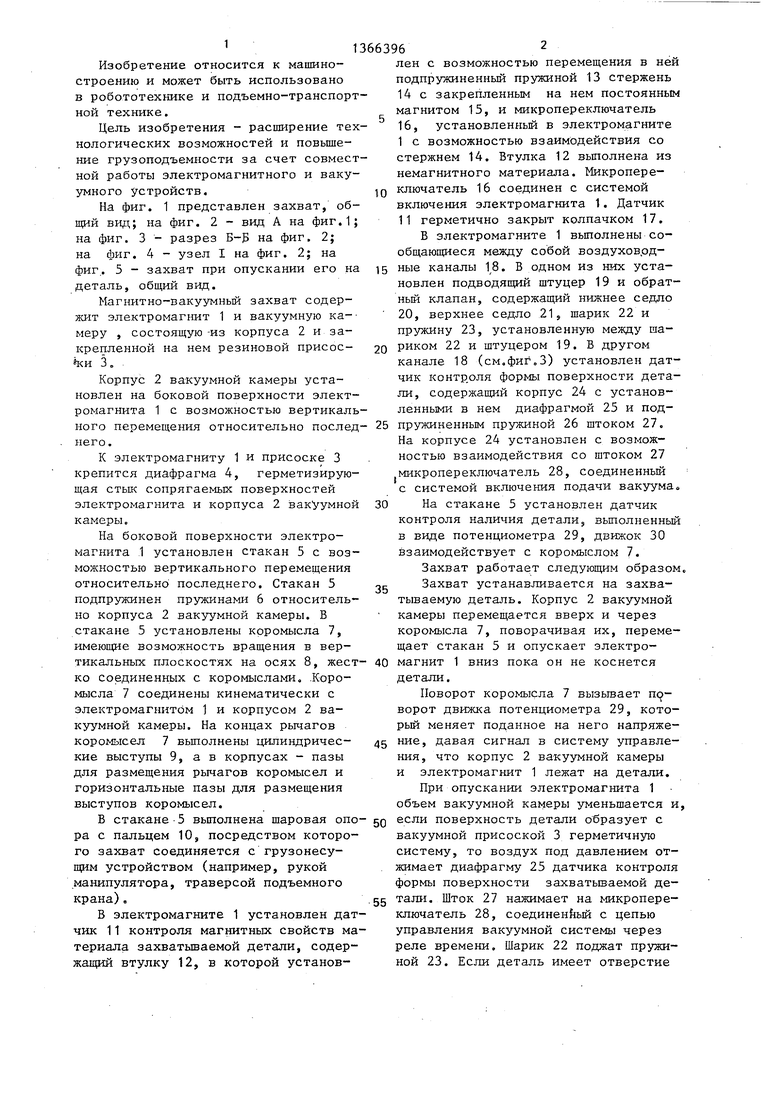
| название | год | авторы | номер документа |
|---|---|---|---|
| Магнитно-вакуумный захват | 1991 |
|
SU1811486A3 |
| Вакуумное грузозахватное устройство | 1977 |
|
SU650938A1 |
| УСТРОЙСТВО ДЛЯ ЗАХВАТА И УСТАНОВКИ ДЕТАЛЕЙ | 1991 |
|
RU2010692C1 |
| Схват манипулятора | 1985 |
|
SU1585149A1 |
| ОЧУВСТВЛЕННЫЙ ВАКУУМНЫЙ ЗАХВАТ | 2005 |
|
RU2283751C1 |
| Устройство для укладки листов в пирамиду | 1989 |
|
SU1776644A1 |
| РОТАЦИОННАЯ РЕМИЗОПОДЪЕМНАЯ КАРЕТКА С ЭЛЕКТРОННОЙ АВТОМАТИЧЕСКОЙ СИСТЕМОЙ УПРАВЛЕНИЯ | 1992 |
|
RU2067135C1 |
| Вакуумное захватное устройство | 1979 |
|
SU846480A1 |
| Очувствленный захват робота | 1985 |
|
SU1296406A1 |
| Манипулятор | 1982 |
|
SU1007965A1 |
Изобретение относится к области машиностроения и может быть использовано в робототехнике и подъемно- транспортной технике. Целью изобретения является расширение технологических возможностей и повышение грузоподъемности за счет совместной работы электромагнитного и вакуумного устройства. Соосно электромагниту 1 установлен стакан 5, подпружиненный относительно корпуса 2 вакуумной камеры и имеющий возможность вертикального перемещения относительно электромагнита 1. На стакане 5 шарнирно установлены коромысла 7, кинематически соединенные с электромагнитом 1 и корпусом 2 вакуумной камеры, и датчик контроля наличия детали, взаимодействующий с одним из коромысел. В электромагните 1 установлены датчик контроля магнитных свойств материала детали и формы поверхности детали, которые при опускании электромагнита 1 на захватьшае- мую деталь определяют ферромагнитные свойства детали, а также наличие отверстий в ней. 1 з.п. ф-лы, 5 ил. (Л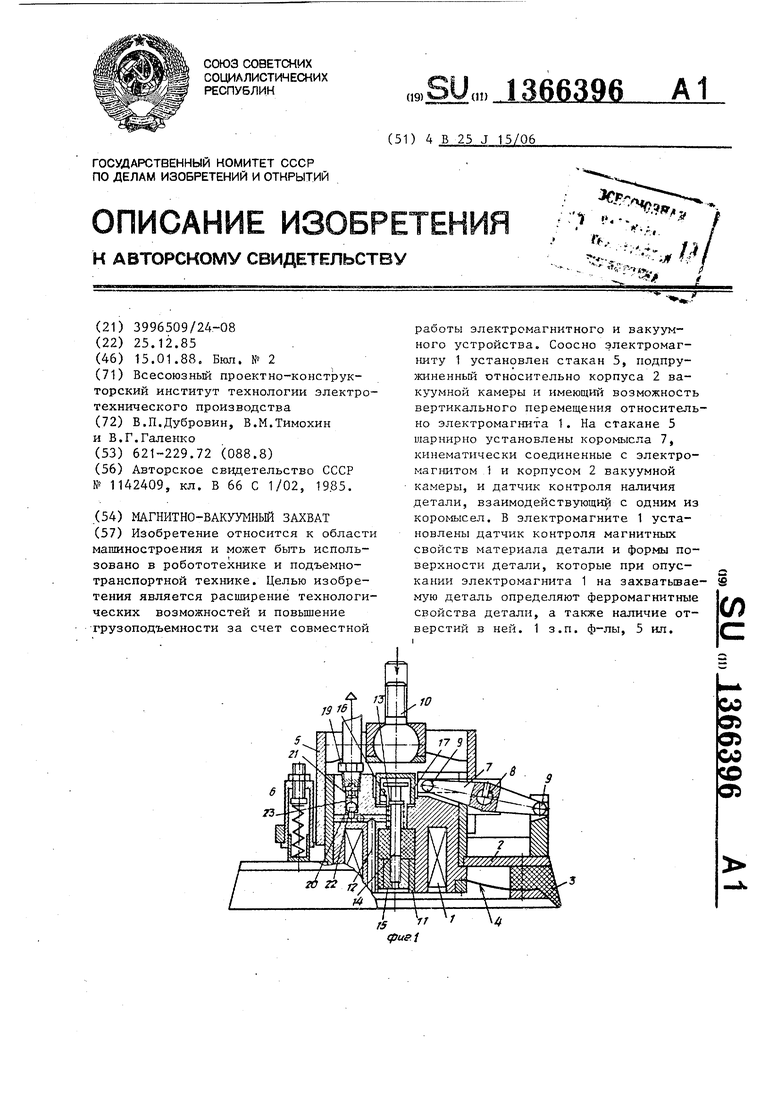
В стакане 5 выполнена шаровая опо- 50 если поверхность детали образует с
ра с пальцем 10, посредством которого захват соединяется с грузонесу- щим устройством (например, рукой манипулятора, траверсой подъемного крана),
В электромагните 1 установлен датчик 11 контроля магнитных свойств материала захватываемой детали, содержащий втулку 12, в которой установвакуумной присоской 3 герметичную систему, то воздух под давлением от жимает диафрагму 25 датчика контрол формы поверхности захватьшаемой де 55 тали. Шток 27 нажимает на микропере ключатель 28, соединенный с цепью управления вакуумной системы через реле времени. Шарик 22 поджат пружи ной 23. Если деталь имеет отверстие
вакуумной присоской 3 герметичную систему, то воздух под давлением отжимает диафрагму 25 датчика контроля формы поверхности захватьшаемой де- тали. Шток 27 нажимает на микропереключатель 28, соединенный с цепью управления вакуумной системы через реле времени. Шарик 22 поджат пружиной 23. Если деталь имеет отверстие
в камере не образуется и датчик контроля формы поверхности не сработает и в систему управления не поступает сигнала о том, что деталь можно захватить вакуумной присоской.
После установки на деталь электромагнита 1 в случае, если деталь ферромагнитная, постоянньй магнит 15 притянется к детали и стержень 14 нажмет на микропереключатель 16, дающий в систему управления сигнал о том, что деталь можно захватить электромагнитом 1. В случае, если де- таль немагнитная, то постоянньй маг- шт 15 неподвижен, микропереключатель 16 не срабатывает. При наличии в системе управления сигнала от датчика контроля формы поверхности не- магнитная деталь будет захвачена вакуумной присоской 3,
Если в систему управления поступили оба сигнала, то можно выбирать любой захват, И предпочтительнее ,электромагнитньй, как более экономич ньй. Если в систему управления поступил сигнал только от датчика контроля формы поверхности, то система управления включает вакуум. Под деист- вием вакуума шарик 22 открьшает отверстие, соединяющее полость присоски 3 с вакуумной системой.
Захваченная вакуумной присоской 3 или электромагнитом 1 деталь под- ,нимается грузозахватным устройством и транспортируется.
Если деталь ферромагнитная,- но подъемной силы электромагнита 1 оказалось недостаточно для ее подъема и при подъеме захвата деталь от него оторвалась, то электромагнит 1 поднимается, коромысла 7 поворачиваются в первоначальное положение. Движок 30 потенциометра 29 занимает нуле- вое, положение, а постоянный магнит 15 под действием магнитного поля электромагнита 1 не возвращается в исходное положение,
В этом случае в, системе управле- ния имеются сигналы, что деталь ферромагнитная со сплошной плоской поверхностью, но не захватштась электрмагнитом 1, так как имеет или большой вес или какую-либо поверхностную прослдику. Захват вновь опускается на деталь, включается дополнительно вакуумная система и деталь захватывается и электромагнитом 1, и вакуш1520
6396
умной присоской 3, Связь электромагнита 1 и корпуса 2 вакуумной камеры через коромысла, установленные на стакане 5, обеспечивает возможность одновременной работы электромагнита 1 и вакуумной присоски 3, так как не вызьюает относительного их смещения при подъеме детали.
Формула изобретения
1,Магнитно-вакуумньй захват, содержащий электромагнит с воздуховод- ным каналом, связанным с вакуумной системой, установленньй на его боковой поверхности с возможностью перемеЕцения в вертикальной плоскости корпус ваку: мной камеры и средство для герметизации стыка сопрягаемых поверхностей вакуумной камеры и электромагнита, выполненное в виде гибкой диафрагмы, внутренний периметр которой закреплен на боковой поверхности электромагнита, а наруж ньй периметр - на корпусе вакуумной камеры, отличающийся, тем, что, с целью расщирения технологических возможностей и повышения грузоподъемности, захват снабжен стаканом, установленным соосно с . электромагнитом с возможностью вертикального перемещения относительно него и подпружиненным относительно корпуса вакуумной камеры, коромыслами, шарнирно установленными в стакане с возможностью поворота в вертикальной плоскости и кинематически связанньп ш с электромагнитом и корпусом вакуумной камеры, датчиками контроля наличия детали, магнитных свойств детали, формы поверхности детали причем датчик контроля наличия установлен на стакане с возможностью взаимодействия с одним из коромысел, а датчик магнитных свойств детали расположен в электромагните, при это в электромагните выполнен дополни- тельньй воздуховодньй канал, связан- ньй с основным каналом, в котором установлен обратньй клапан, а в дополнительном канале установлен датчик контроля формы поверхности детали.
2,Захват non.l, отличающийся тем, что датчик контроля формы поверхности детали выполнен в виде датчика избыточного давления, связанного с вакуумной системой,
51
при этом датчик контроля магнитных свойств детали выполнен в виде втулки, в которой установлен с возможностью перемещения подпружиненный относительно нее стержень с закрепленным на нем постоянным магнитом, причем стержень имеет возможность взаи366396
модействия с микропереключателем, связанньм с системой включения электромагнита, а датчик контроля наличия детали выполнен в виде потенциометра, корпус которого закреплен на стакане, а его движок жестко связан с коромыслом.
Вид/
Фиг.3
ФигМ
| Грузозахватное устройство | 1983 |
|
SU1142409A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
| Видоизменение прибора для получения стереоскопических впечатлений от двух изображений различного масштаба | 1919 |
|
SU54A1 |
