) О5 СЛ
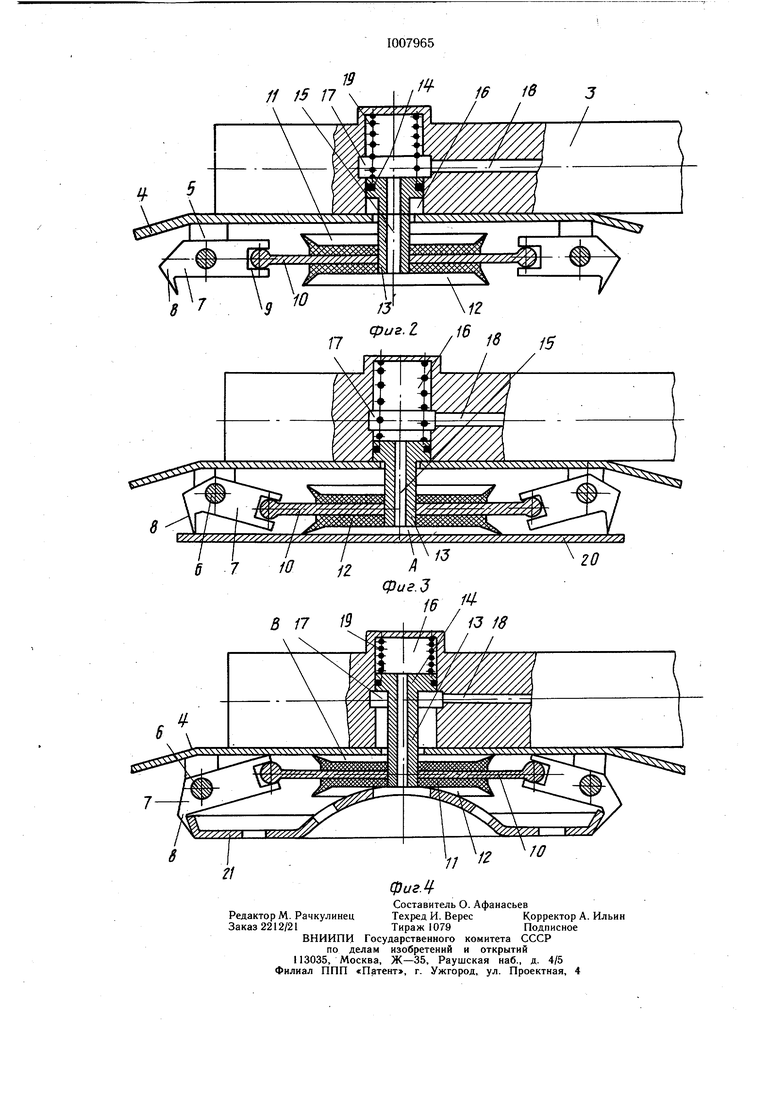
У/////////////7///7/77/// фиг./ Изобретение относится к машиностроению, в частности к манипуляторам для автоматизации вспомогательных операций на машиностроительных предприятиях при обслуживании, например, процессов пластической деформации деталей. Известен манипулятор, содержащий основание с подвижно закрепленной на нем механической рукой, несущей схват, в корпусе которого выполнен воздуховод, связанный с поршнем вакуумного насоса и присосками 1. Недостатком данного манипулятора является невозможность переноса деталей, имеющих сложный профиль или отверстия. Цель изобретения - расширение технологических возможностей манипулятора. Поставленная цель достигается тем, что, в манипуляторе, содержащем основание с подвижно закрепленной на нем механической рукой, несущей схват, в корпусе которого выполнен воздуховод, связанный с поршнем вакуумного насоса и присосками, схват снабжен коромыслами, диском, связанным с ними, и зажимами, которые кинематически связаны с диском, причем на поверхности последнего расположены по вакуумной присоске, соединенной с воздуховодом, а в поршне выполнен канал для сообщения с воздуховодом, при этом поршень жестко связан с диском. На фиг. 1 показан предлагаемый манипулятор, общий вид; на фиг. 2 - схват, общий вид; на фиг. 3 - то же, с листовой заготовкой; на фиг. 4 - то же с деталью На руке 1 манипулятора 2 укреплен корпус 3 схвата, несущий жестко установленный на нем фланец 4 с проушинами 5, на осях 6 которых свободно качаются коромысла 7 с захватами 8 и пазами 9 по разным концам. В пазах 9 коромысел 7 расположен диск 10, к которому с разных поверхностей крепятся две присоски 11 и 12.Присоска 11 обращена рабочей поверхностью к фланцу 4, а рабочая поверхность присоски 12 - в противоположную сторону. В диск 10 жестко вмонтирован щток 13 с поршнем 14. В щтоке 13 и поршне 14 выполне сквозной осевой канал 15. В корпусе 3 схвата выполнено глухое отверстие 16, соосное штоку 13,с кольцевой проточкой 17, соединенной воздуховодом 18 с вакуумным насосом ( не показан). В глухом отверстии 16 корпуса 3, как и в цилиндре, помещен поршень 14, подпружиненный относительно корпуса 3 пружиной 19. На фиг. 3 и 4 показаны также листовая заготовка 20 и профилированная деталь 21. Манипулятор работает следующим образом. После подвода схвата рукой манипулятора к плоской листовой заготовке 20 (фиг. 3) и опускания схвата коромысла 7, опираясь на нее захватами 8, поворачиваются на осях 6 и опускают диск 10 до касания заготовки рабочей поверхностью присосками 12. Вместе с диском 10 опускается вниз и щток 13, в результате чего поршень 14 располагается ниже кольцевой проточки 17, и полость А присоски 12, отраженная листовой заготовкой 20, сообщается с воздуховодом 18 через осевой канал 15 щтока 13 и кольцевую проточку 17. При включении вакуумного насоса в полости А создается раз режение и листовая заготовка 20 прижимается атмосферным давлением к присоске 12, после чего переносится рукой манипулятора на технологическую позицию. После выключе ния вакуумного насоса давление в полости Л становится равным атмосферному, и заготовка сбрасывается. При взятии готовой, профилированной детали 21 (фиг. 4), имеющей, например, сложную форму и сквозные отверстия, схват опускается на деталь 21, которая, нажимая на чашку присоски 12, поднимает диск 10 до прижатия рабочей поверхности присоски 11 к нижней поверхности фланца 4. Вместе с диском 10 поднимается вверх по глухому отверстию 16 и щток 13, в результате чего поршень Нх располагается выше кольцевой 17, и замкнутая полость В, ограниченная нижней плоскостью фланца 4 и чашей присоски И, сообщается с воздуховодом 18 через глухое отверстие 16 и кольцевую проточку 17. Одновременно с этим диск 10, перемещаясь к фланцу, поворачивает на о,сях 6 коромысла 7, которые захватами 8 зажимают готовую деталь 21. При включении вакуумного насоса в полости В создается разрежение, атмосферное давление прижимает диск 10 к фланцу 4 и захваты 8 надежно удерживают готовую деталь 21 При включении вакуумного насоса давление в полости В становится равным атмосферному, и пружина 19, возвращая диск 10 в исходное положение, поворачивает коромысла 7 и освобождает деталь 21 от захватов 8. Таким образом, предлагаемым манипулятором можно взять как плоскую заготовку, так и готовую деталь сложной формы, имеющую сквозные отверстия, без замены схвата или применения второго манипулятора. Изоб ретение позволяет расщирить технологические возможности манипулятора.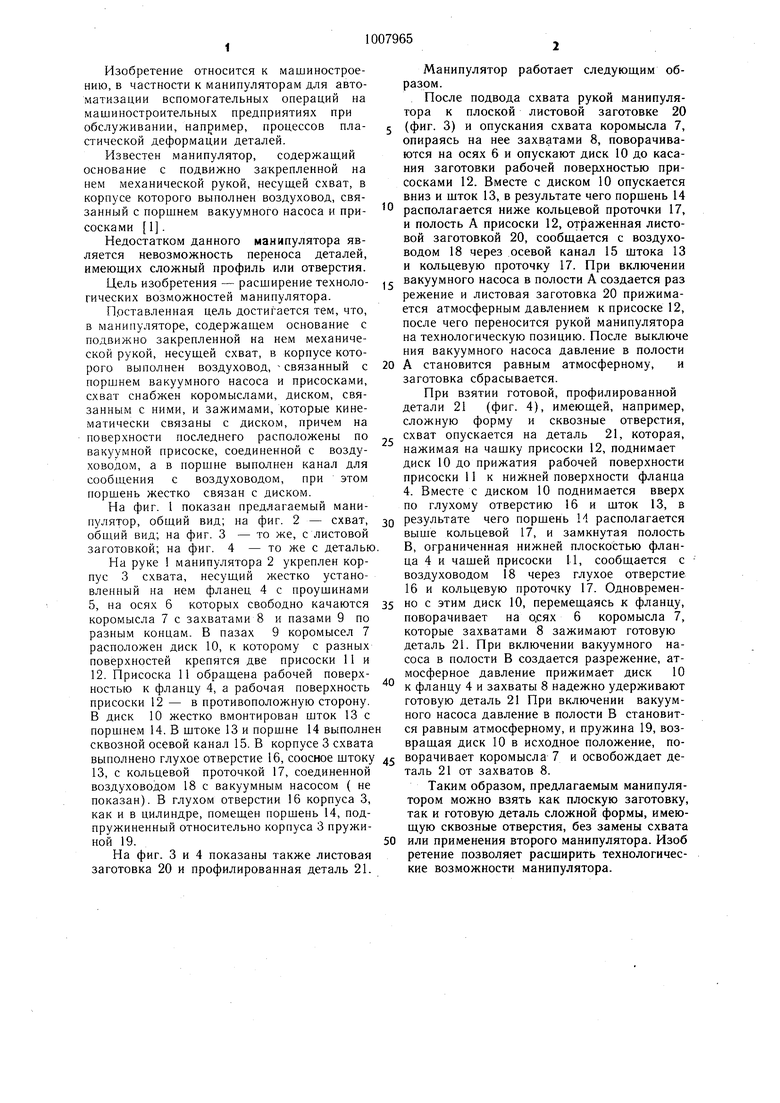
| название | год | авторы | номер документа |
|---|---|---|---|
| Вакуумный захватный орган | 1985 |
|
SU1294434A1 |
| Схват | 1989 |
|
SU1701516A1 |
| Схват манипулятора | 1985 |
|
SU1585149A1 |
| Вакуумный схват для листовых деталей | 1982 |
|
SU1030293A1 |
| Устройство для сборки и рельефной сварки тела вращения с шипами | 1985 |
|
SU1294550A1 |
| Рука манипулятора | 1979 |
|
SU841963A1 |
| Вакуумный захватный орган | 1980 |
|
SU904846A1 |
| Вакуумный схват манипулятора | 1986 |
|
SU1421533A1 |
| Вакуумный схват манипулятора | 1988 |
|
SU1521587A1 |
| Вакуумный захватный орган | 1986 |
|
SU1386446A1 |
МАНИПУЛЯТОР, содержащий основание с подвижно закрепленной на нем механической рукой , несущей схват в корпусе которого выполнен воздуховод, связанный с поршнем вакуумного насоса и присосками, отличающийся тем, что, с целью расширения технологических -возможностей, схват снабжен коромыслами, диском, связанным с ними, и зажимами, которые кинематически связаны с диском, причем на поверхности последнего расположены по одной вакуумной присоске, соединенной с воздуховодом, а в поршне выполнен канал для сообщения с воздуховодом, при этом поршень жестко связан с диском. (Л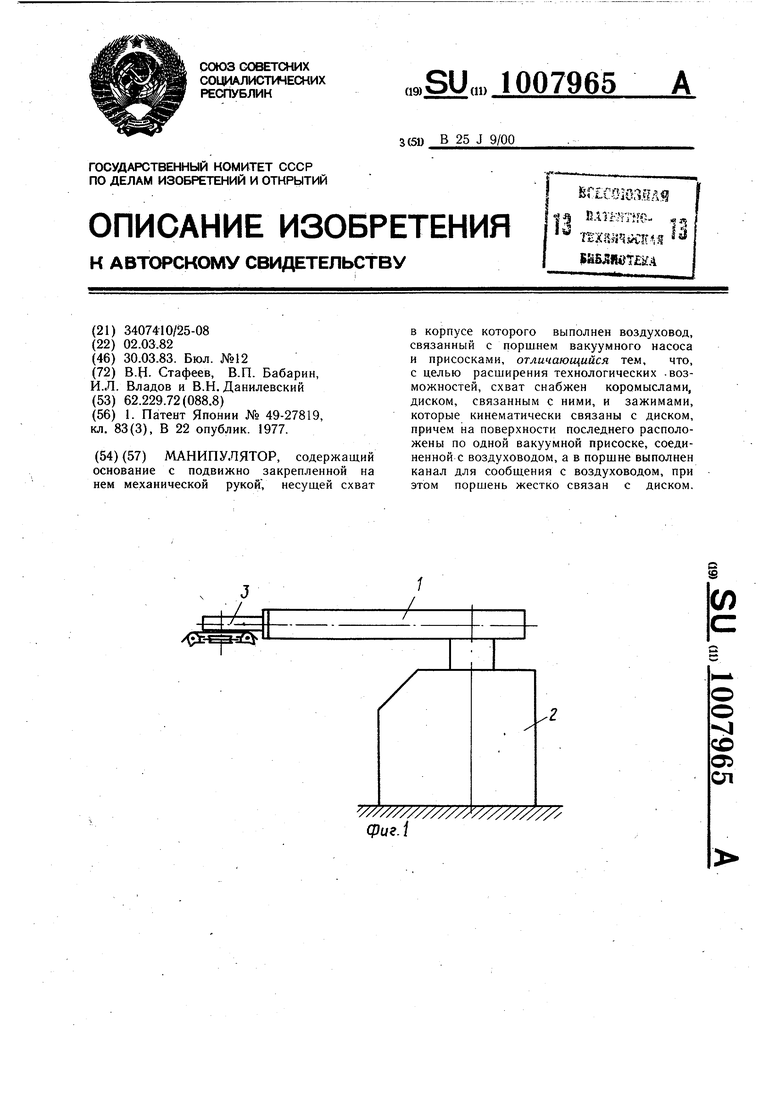
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Способ смешанной растительной и животной проклейки бумаги | 1922 |
|
SU49A1 |
| Пуговица | 0 |
|
SU83A1 |
