Изобретение относится к робототехнике и может быть использовано в конструкциях адаптивных роботов, приспосабливающихся к весу захватываемых объектов и манипулирующих с хрупкими и легко деформируемыми деталями.
Цель изобретения - повьшение надежности работы и расширение функциональных возможностей захвата робота.
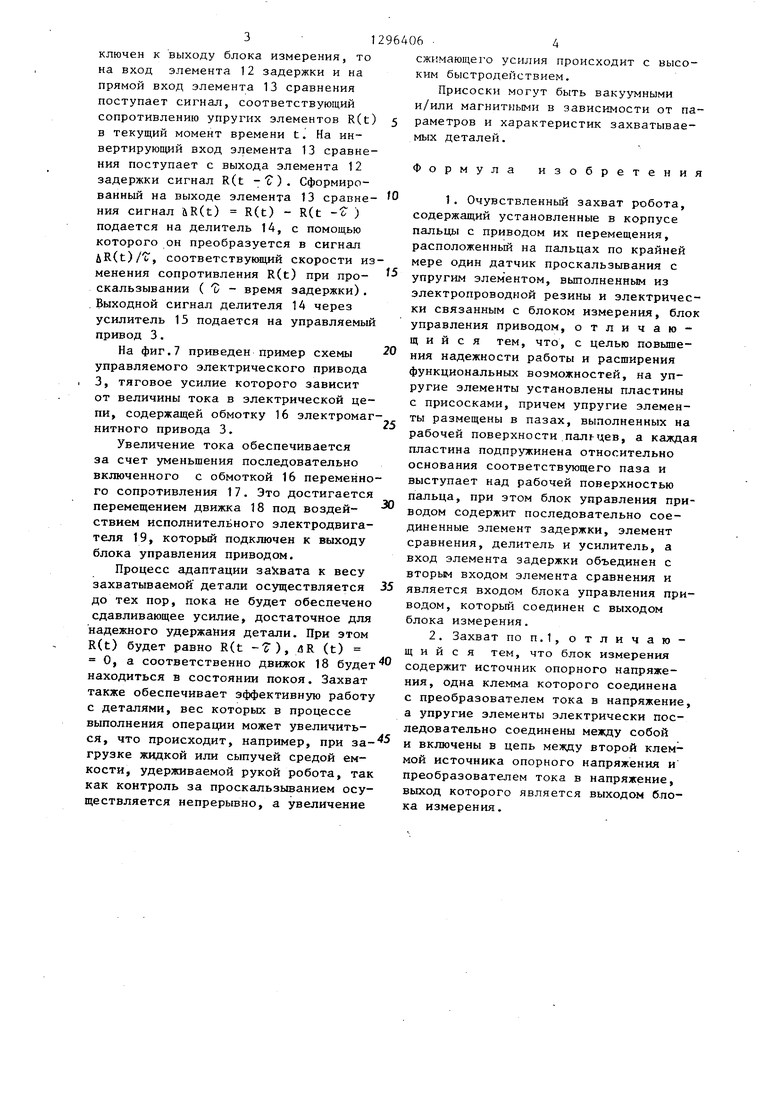
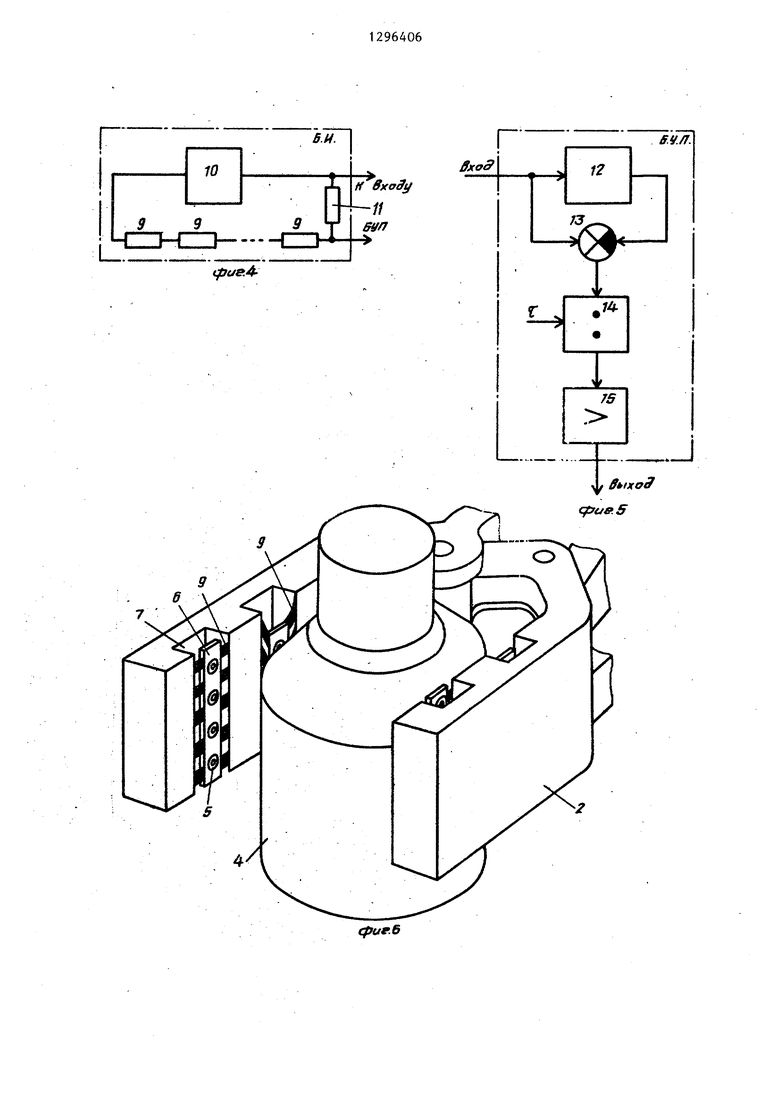
На фиг.1 изображен захват робота с деталью, вид сверху; на фиг.2 - узел 1 на фиг.1; на фиг.З - разрез А-А на фиг.2{ на фиг.4 и 5 - электрические схемы блока измерения и блока управления приводом соответственно J на фиг.6 - захват, аксонометрия; на фиг.7 - схема управляемог
привода захвата.
Очувствленный захват робота содержит установленные на корпусе 1 пальцы 2 с приводом 3 их перемещения (фиг.1 и 6). Для определения проскальзывания детали 4 при недостаточ ном усилии сжатия пальцев 2 в последних установлены датчики проскальзывания. Каждый датчик проскальзывания включает выступающий над рабочей поверхностью пальца 2 воспринимающий элемент, который выполнен в виде набора присосок 5 (фиг.1, 2 и 6), закрепленных на пластине 6, которая установлена в пазу 7, вьшолненном на рабочей поверхности пальца 2, Дат чики проскальзывания через блок измерения связаны с блоком управления приводом.
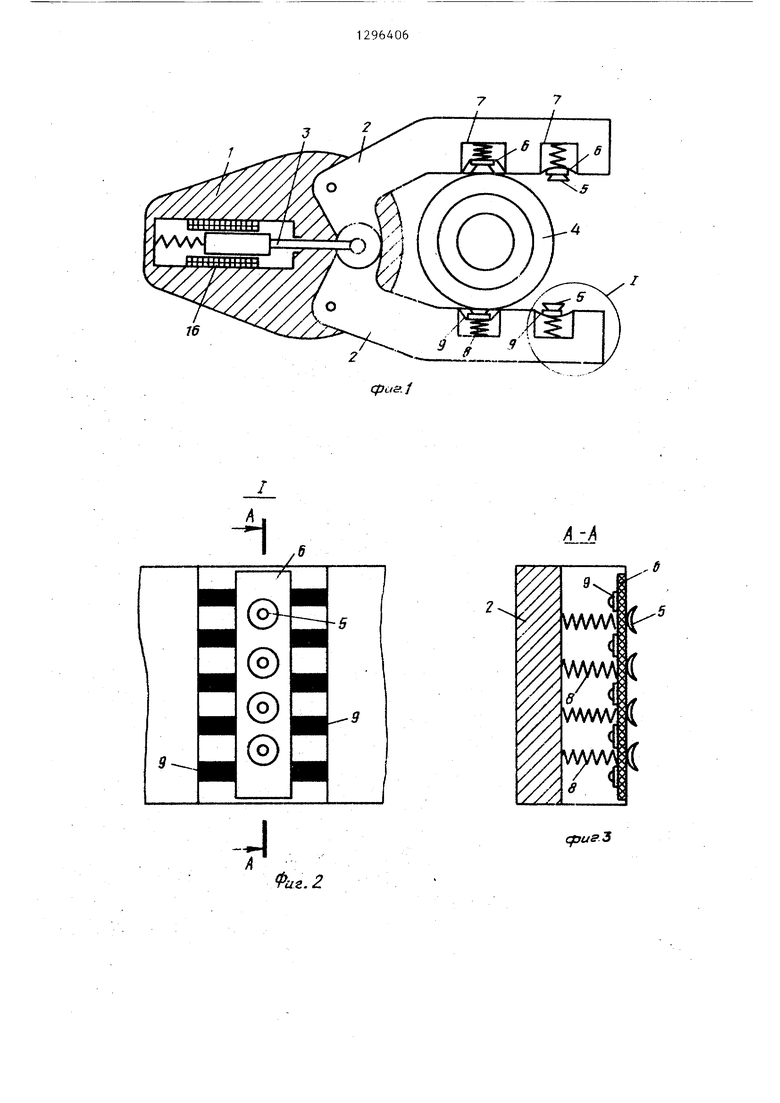
Пластина 6 подпружинена с помощью пружин 8 относительно основания паза 7 и связана с его боковыми поверхностями посредством упругих элементов 9, которые для обеспечения регистрации сигнала проскальзывания выполнены из электропроводной резины. Блок измерения (фиг.4) представляет собой, например, электрическую цепь с источником 10 опорного напряжения, в которую последовательно с упругими элементами 9 включен преобразователь тока в напряжение, выполненный, например, в виде электричес1Лзго сопротивления 11. Напряжение, снимаемое с сопротивления 11, зависит от электрического сопротивления упругих эле ментов 9 и является выходным сигнало блока измерения.
Выход блока измерения подключен к входу блока управления приводом
0
5 О
0 5 Q
(фиг.З), которьй содержит элемент 12 задержки, элемент 13 сравнения, делитель 14 и усилитель 15. Выход последнего является выходом блока управления приводом;.
Устройство работает следующим образом.
При захвате детали 4 под воздействием привода 3 пальцы 2 сближаются. При контакте детали 4 с воспринимающим элементом присоски 5 закрепляются на поврехности детали 4 (фиг.6), а подвижные пластины 6 утапливаются в соответствующих пазах 7, сжимая пружины 8. В момент начала движения (подъема детали 4 рукой робота) обеспечивается регистрация проскальзывания детали 4 и устанавливается требуемое сжимающее усилие в пальцах 2 захвата. Эти операции обеспечиваются за счет срабатывания датчика при проскальзывании детали 4 в пальцах 2 захвата.
Если детсшь 4 проскальзьгоает, то вместе с ней относительно пальцев 2 смещаются и присоски 5, закрепленные на ее поверхности. Так как присоски 5 жестко связаны с пластинами 6, то последние смещаются в пазах 7, изменяя при этом состояние упругих элементов 9 из электропроводной резины, с помощью которых пластины 6 связаны с боковыми поверхностями пазов 7. При растяжении упругих элементов 9 изменяется их электрическое сопротивление, а соответственно изменяется ток в электрической цепи (фиг.4), так как упругие элементы 9 и сопротивление 11 последовательно подключены к источнику 10 опорного напряжения. Изменение напряжения на выходе блока измерения, т.е. напряжения, снимаемого с сопротивления 11, соответствует наличию проскальзывания и является командным сигналом для увеличения сжимающего усилия. С помощью блока управления приводом (фиг.З) обеспечивается необходимая скорость изменения (нарастания) сжимающего усшшя, соответствующая скорости изменения электрического сопротивления упругих элементов 9 при проскальзывании. Это позволяет осуществлять адаптацию захвата к весу захватьшаемой детали с высоким быстродействием без осуществления пробных движений руки робота. Так как вход блока управления приводом под
ключей к выходу блока измерения, то на вход элемента 12 задержки и на прямой вход элемента 13 сравнения поступает сигнал, соответствующий сопротивлению упругих элементов R(t) в текущий момент времени t. На инвертирующий вход элемента 13 сравнения поступает с выхода элемента 12 задержки сигнал R(t - о ) . Сформированный на выходе элемента 13 сравнения сигнал uR(t) R(t) - R(t - о ) подается на делитель 14, с помощью которого он преобразуется в сигнал iR(t)/ o , соответствующий скорости изменения сопротивления R(t) при проскальзывании ( с/ - время эадержки) , .Выходной сигнал делителя 14 через усилитель 15 подается на управляемый привод 3.
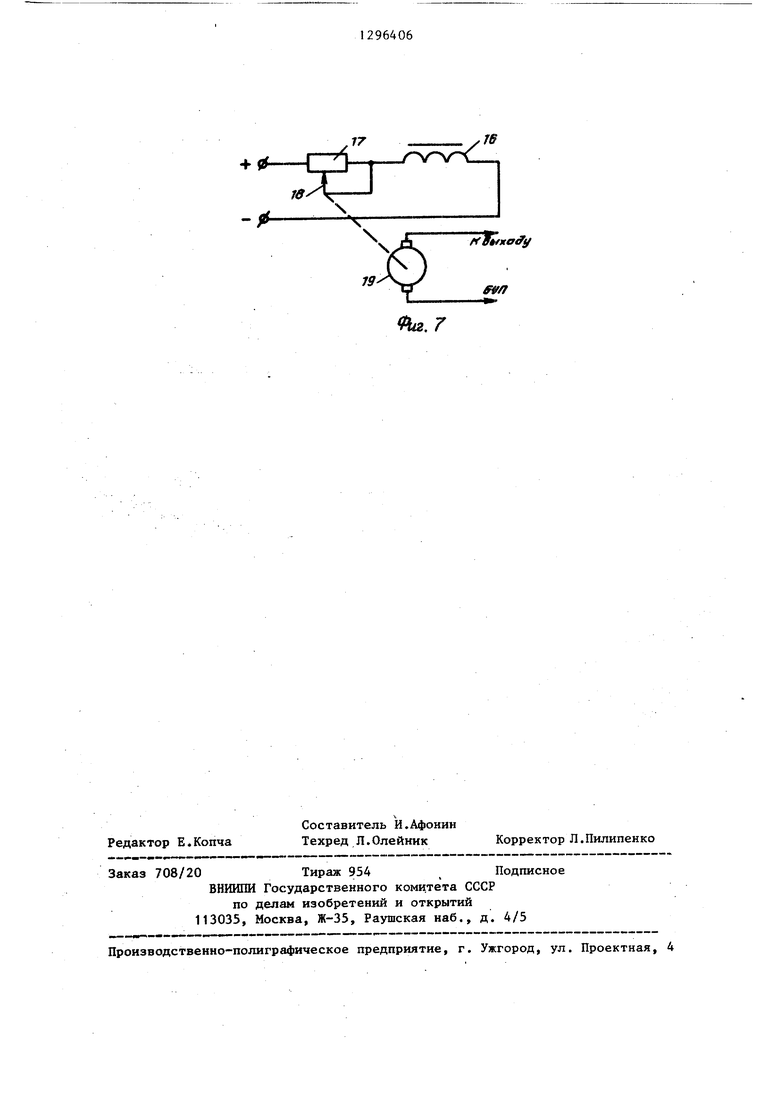
На фиг.7 приведен пример схемы управляемого электрического привода 3, тяговое усилие которого зависит от величины тока в электрической цепи, содержащей обмотку 16 электромагнитного привода 3.
Увеличение тока обеспечивается за счет уменьшения последовательно включенного с обмоткой 16 переменного сопротивления 17. Это достигается перемещением движка 18 под воздействием исполнительного электродвигателя 19, который подключен к выходу блока управления приводом.
Процесс адаптации захвата к весу захватываемой детали осуществляется до тех пор, пока не будет обеспечено сдавливающее усилие, достаточное для надежного удержания детали. При этом R(t) будет равно R(t -Т), /SR (t) О, а соответственно движок 18 будет находиться в состоянии покоя. Захват также обеспечивает эффективную работу с деталями, вес которых в процессе выполнения операции может увеличиться, что происходит, например, при загрузке жидкой или сыпучей средой емкости, удерживаемой рукой робота, так как контроль за проскальзьшанием осуществляется непрерывно, а увеличение
O
5
0
0
5
0
сжимающего усилия происходит с высоким быстродействием.
Присоски могут быть вакуумными и/или магнитными в зависимости от параметров и характеристик захватываемых деталей.
Формула изобретения
1. Очувствленный захват робота, содержащий установленные в корпусе пальцы с приводом их перемещения, расположенный на пальцах по крайней мере один датчик проскальзывания с упругим элементом, выполненным из электропроводной резины и электрически связанным с блоком измерения, блок управления приводом, отличающийся тем, что, с целью повышения надежности работы и расширения функциональных возможностей, на упругие элементы установлены пластины с присосками, причем упругие элементы размещены в пазах, выполненных на рабочей поверхности палрцев, а каждая пластина подпружинена относительно основания соответствующего паза и выступает над рабочей поверхностью пальца, при этом блок управления приводом содержит последовательно соединенные элемент задержки, элемент сравнения, делитель и усилитель, а вход элемента задержки объединен с вторым входом элемента сравнения и является входом блока управления приводом, который соединен с выходом блока измерения.
2. Захват поп.1, отличающийся тем, что блок измерения содержит источник опорного напряжения, одна клемма которого соединена с преобразователем тока в напряжение, а упругие элементы электрически последовательно соединены между собой и включены в цепь между второй клеммой источника опорного напряжения и преобразователем тока в напряжение, выход которого является выходом блока измерения.
фа&. 1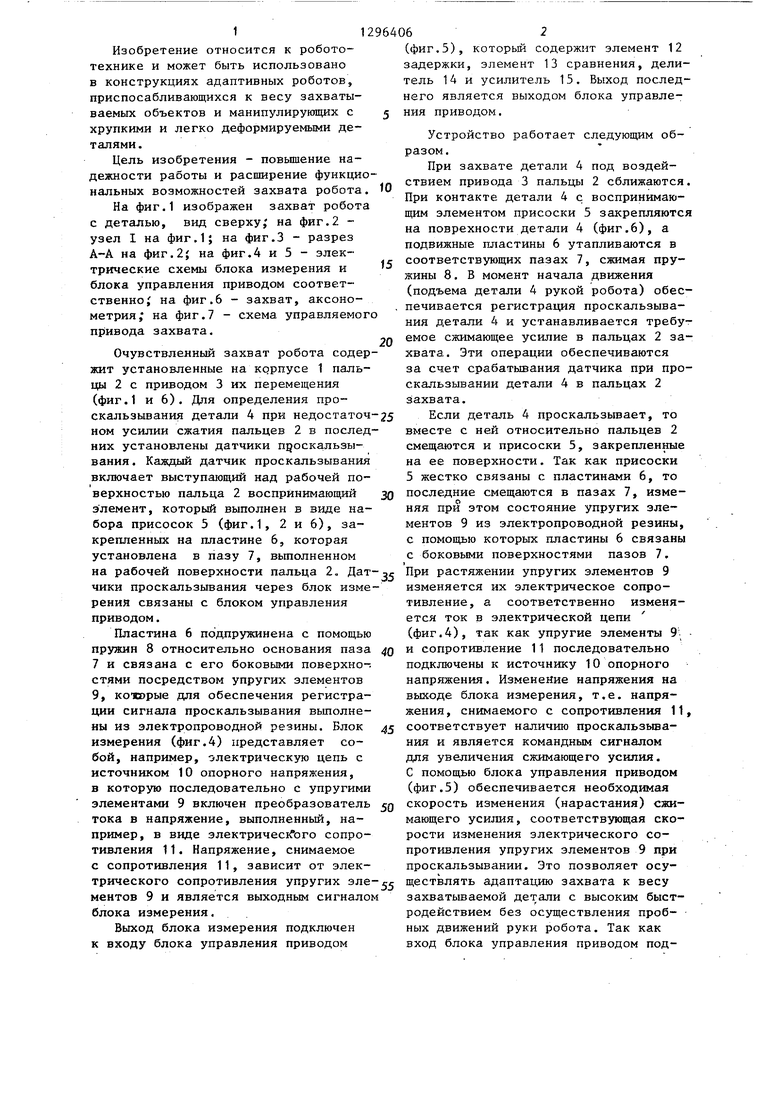
| название | год | авторы | номер документа |
|---|---|---|---|
| Схват очувствленного робота | 1984 |
|
SU1232475A1 |
| Устройство для адаптации робота к весу захватываемых деталей | 1986 |
|
SU1395436A1 |
| Очувствленный схват робота | 1985 |
|
SU1373565A1 |
| Захват манипулятора | 1982 |
|
SU1047680A2 |
| Захватное устройство | 1990 |
|
SU1768383A2 |
| Устройство для управления адаптивным роботом | 1980 |
|
SU888067A1 |
| Вакуумный захват | 1982 |
|
SU1058865A1 |
| Очувствленный схват | 1985 |
|
SU1294602A1 |
| Очувствленное захватное устройство | 1990 |
|
SU1808693A1 |
| ПНЕВМОПИНЦЕТ (ВАРИАНТЫ) И СПОСОБ ВЗЯТИЯ И РАЗМЕЩЕНИЯ КОНТАКТНЫХ ЛИНЗ ИЛИ ДРУГИХ АНАЛОГИЧНЫХ ЭЛЕМЕНТОВ НА ОБЪЕКТАХ ЭТИМ ПНЕВМОПИНЦЕТОМ (ВАРИАНТЫ) | 1998 |
|
RU2200517C2 |
Изобретение относится к робототехнике и может быть использовано в конструк1Ц1ях адаптивных роботов, приспосабливающихся к весу захватьшае- объектов и манипулирующих с хрупкими и легкодеформируемыми деталями. Цель изобретения - повьопение надежности и расширение функциональных возможностей. Захват робота содержит датчики проскальзывания, выполненные в виде набора присосок, установленных на подвижных пластинах, которые подпружинены и с помощью упругих элементов из электропроводной резины закреплены в пазах на рабочей поверх- нести пальцев захвата, блок управления приводом пальцев, который содержит элемент задержки, элемент сравнения, делитель и выходной усилитель, причем упругие элементы электрически соединены с блоком измерения, связанным с блоком управления приводом. 1 з.п. ф-лы, 6 ил. с S (Л
/1
f(-f
Фае. 2
cpuffS
cpuf.6
Редактор Е Копча
Составитель И.Афонин Техред Л.Олейник
708/20Тираж 934
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Корр Подпи
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
%2,7
Корректор Л.Пилипенко Подписное
