сл
00 05 О5 00
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ИЗМЕРЕНИЯ И КОНТРОЛЯ РАДИАЛЬНО-ОСЕВЫХ ЗАЗОРОВ В ТУРБОМАШИНАХ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2005 |
|
RU2280238C1 |
| УСТРОЙСТВО И СПОСОБ ИЗМЕРЕНИЯ ВРЕМЕНИ ПРОХОЖДЕНИЯ ВЕРШИН ЛОПАТОК В ТУРБОМАШИНЕ | 2012 |
|
RU2593427C2 |
| Устройство для измерения радиального зазора турбомашины | 1977 |
|
SU667800A1 |
| Измеритель частоты колебаний лопаток турбомашин | 1980 |
|
SU1006929A1 |
| Способ измерения колебательной скорости рабочих лопаток турбомашин | 1978 |
|
SU771477A1 |
| Емкостный преобразователь радиальных зазоров турбомашины | 1984 |
|
SU1193451A1 |
| Система для исследования деформаций лопаток турбомашин | 1990 |
|
SU1775620A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ КОЛЕБАНИЙ ЛОПАТОК ВРАЩАЮЩЕГОСЯ КОЛЕСА ТУРБОМАШИНЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2001 |
|
RU2207523C1 |
| СПОСОБ ИЗМЕРЕНИЯ ПАРАМЕТРОВ ДВИЖЕНИЯ ЛОПАТОК РОТОРА ТУРБОМАШИНЫ | 1996 |
|
RU2138012C1 |
| Способ измерения радиальных зазоров в турбомашинах | 1990 |
|
SU1779908A1 |
Изобретение относится к измери- :тельной технике и имеет целью повышение точности измерения радиальных зазоров между концами лопаток -рабочего колеса турбомашины и ее корпусом за счет исключения влияния неидентичности формы электродов емкостного датчика и их возможного смещения в радиальном направлении при установке датчика на объекте контроля. Устройство для измерения радиальных зазоров содержит емкостный
ffJue.Z
датчик 1 с подключенными к нему ис- точником питания постоянного тока и регистрирующей аппаратурой (осциллографом и вычислительным устройством) Имеется также двухпозиционный приводной механизм пневматического типа для смещения электрода 2 датчика в процессе измерений на калиброван1 .
Изобретение относится к измерительной технике и может быть использовано для бесконтактных измерений зазоров между вращающимися и неподвижными элементами турбомашин.
Цель изобретения - повышение точности путем исключения влияния неидентичности формы электродов датчиков и их возможного смещения в радиальном направлении при установке на объекте контроля.
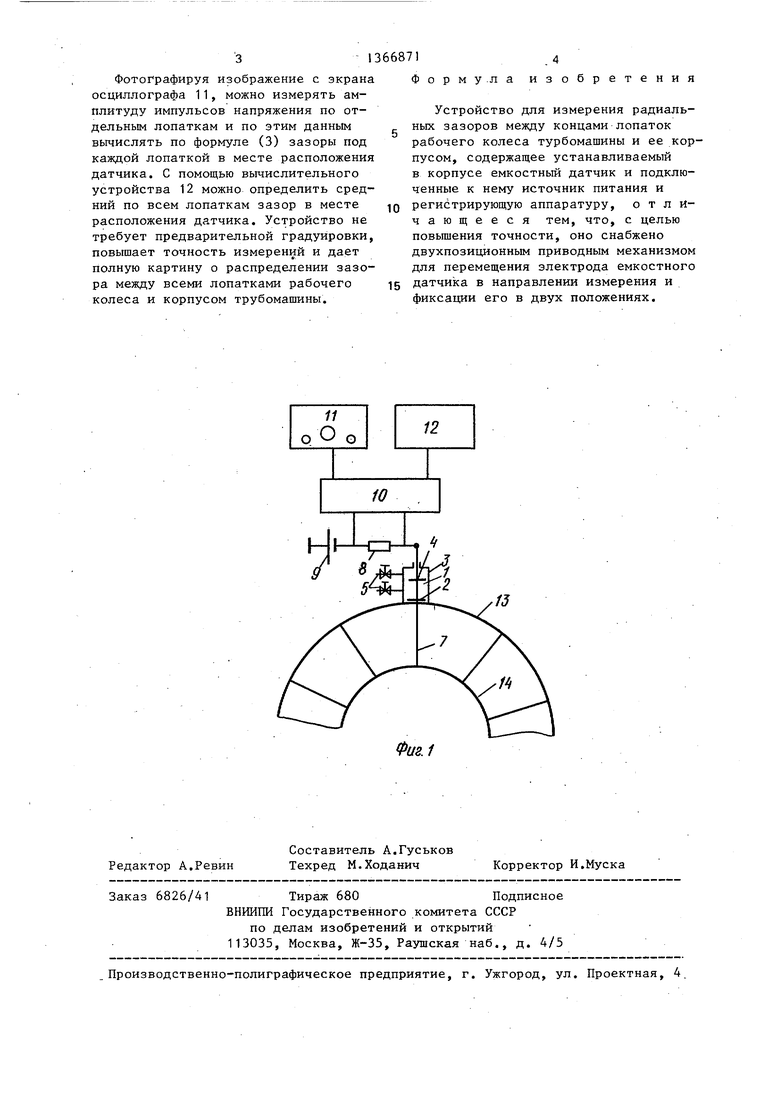
На фиг о 1 изображено предлагаемое устройство, общий вид; на фиг, 2 - конструкция емкостного датчика с двухпозиционным приводньм механизмом для перемещения его электрода,
Устройство содержит емкостной датчик 1 с подвижным в направлении измеряемого зазора электродом 2 и двухпозиционный приводной механизм, выполненный в виде пневмоцилиндра 3, в котором размещен поршень 4, закрепленный на электроде 2 датчика. Под действием сжатого воздзгха, подводимого поочередно с помо4цью вентилей 5 к штуцерам 6 поршень 4 и электрод 2 емкостного датчика могут занимать одно из крайних положений - максимально удаленное или максимально приближенное к объекту контроля - лопатке 7 рабочего колеса турбомашины. К электроду 2 емкостного датчика через резистор 8 подключен источник 9 напряжения постоянного тока. Кроме того, к резистору 8 через повторитель 10 напряжения подключена регистрирующая аппаратура - осциллограф 11 и аналоговое вычислительное устройство 12. Емкостной датчик t установлен в корпусе 13 турбомашины и отделен зазором от лопаток 7 колеса 14 турбомашины.
ную величину путем перепуска сжатого воздуха через штуцеры 6 к поршню 4, закрепленному на электроде 2 датчика. Это позволяет реализовать тестовый метод измерения с помощью емкостного датчика, имеющего один электрод упрощенной конструкции - стержневого типа. 2 ил.
Устройство работает следующим образом.
При прохождении лопаток 7 рабочего колеса 14 под емкостным датчиком
Iна резисторе В формируются импульсы напряжения, которые через повторитель 10 подаются на осциллограф
I1и аналоговое вычислительное уст- ройство 12, В процессе измерений
электрод 2 датчика 1 под действием двухпозиционного приводного механизма переводится то в максимально цриближенное, то в максимально уда- ленное от лопаток 7 положение. Амплитуда импульсов в первом случае определяется соотношением
АИ k -f
(1)
где V - окружная скорость лопатки
рабочего колеса; k - коэффициент.пропорциональности}
о - измеряемый.радиальный зазор между лопаткой и электродом 2 датчика.
Амплитуда импульсов во втором 30 случае определяется соотношением
ii
и S+a
(2)
где а - величина смещения электрода из одного крайнего положения в другое. По результатам этих измерений
с помощью вычислительного устройст-.
ва 12 величина зазора 5 вычисляется
по формуле
А.г
(3)
(1
Фотографируя изображение с экрана осциллографа 11, можно измерять амплитуду импульсов напряжения по отдельным лопаткам и по этим данным вычислять по формуле (3) зазоры под каждой лопаткой в месте расположения датчика. С помощью вычислительного устройства 12 можно определить средний по всем лопаткам зазор в месте расположения датчика. Устройство не требует предварительной градуировки, повышает точность измерений и дает полную картину о распределении зазора между всеми лопатками рабочего колеса и корпусом трубомашины.
6871
Ф о р м у -Л а
и
. 4 3 о
бретения
Устройство для измерения радиальных зазоров между концами лопаток рабочего колеса турбомашины и ее корпусом, содержащее устанавливаемый в корпусе емкостньш датчик и подключенные к нему источник питания и
регистрирующую аппаратуру, отличающееся тем, что, с целью повышения точности, оно снабжено двухпозиционным приводным механизмом для перемещения электрода емкостного
датчика в направлении измерения и фиксации его в двух положениях.
/J
| Емкостной датчик расстояния до проводящей поверхности | 1978 |
|
SU922498A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Авиационная промышленность | |||
| Колосниковая решетка с чередующимися неподвижными и движущимися возвратно-поступательно колосниками | 1917 |
|
SU1984A1 |
| Способ использования делительного аппарата ровничных (чесальных) машин, предназначенных для мериносовой шерсти, с целью переработки на них грубых шерстей | 1921 |
|
SU18A1 |
